









VS+OPENCV+手机摄像头实现人脸和人眼跟踪
IP摄像头
首先用手机下载一个IP摄像头
百度网盘:https://pan.baidu.com/s/1U6wm4O_7W_L41jZ7Vj75Ow
提取码:4d1o
app如下图
1、实现方式
①手机和电脑同在一个局域网
②手机提供热点给电脑
③不同wifi 改变IP即可
2、打开IP摄像头
注意此时,会提示一个用户名和密码,请记住!!!
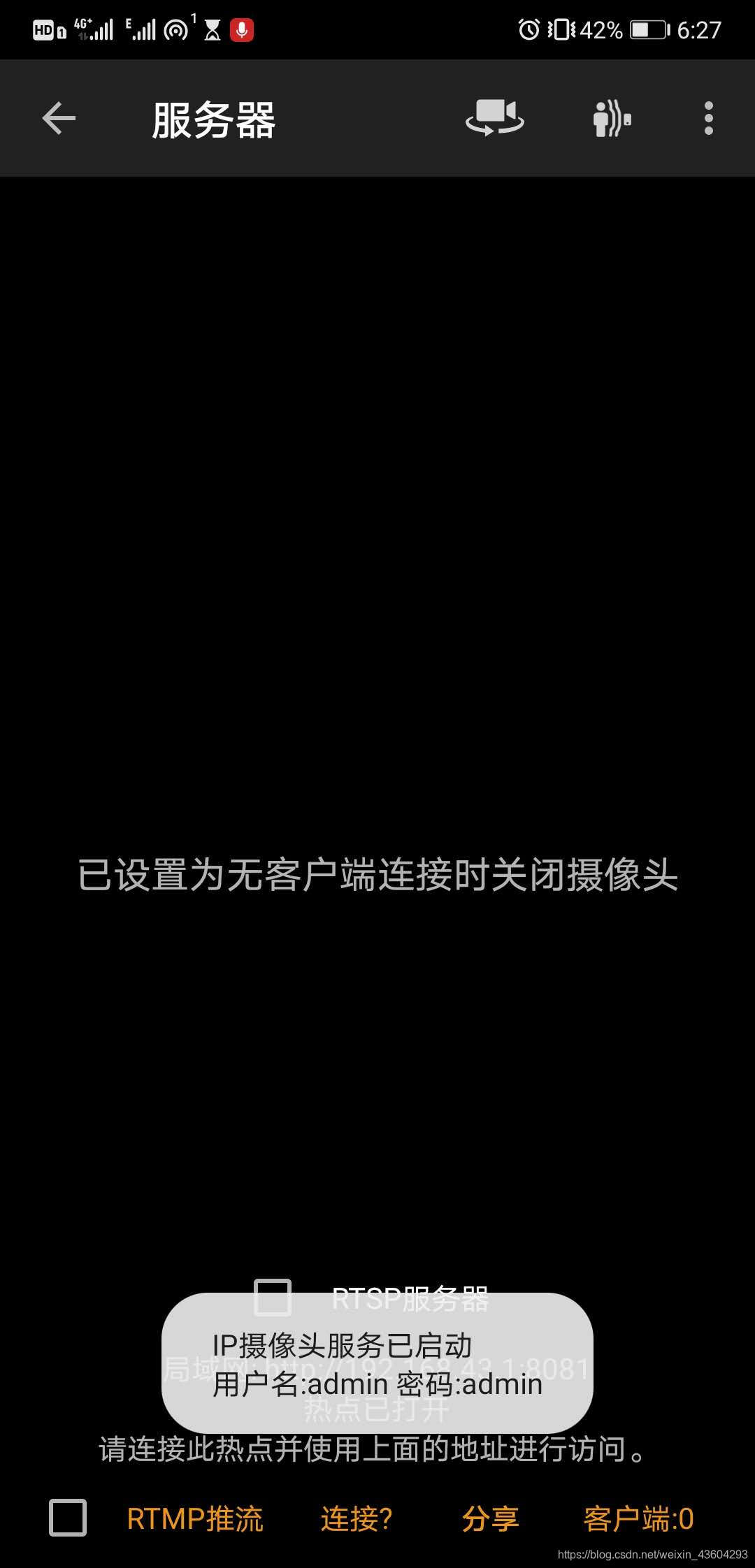
3、这里有个局域网的IP,就是我们要VS连接的地址
4、代码如下
#include <iostream>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace cv;
CascadeClassifier face_dector,right_dector,left_dector;
string xmlfilepath = "D:/softwire/opencv_files/self_opencv/install/etc/haarcascades/haarcascade_frontalface_alt.xml";
string xmlfilepath_right_eye = "D:/softwire/opencv_files/self_opencv/install/etc/haarcascades/haarcascade_eye.xml";
string xmlfilepath_left_eye = "D:/softwire/opencv_files/self_opencv/install/etc/haarcascades/haarcascade_eye.xml";
int main()
{
//VideoCapture capture(0); //flip 可以把window摄像头拍摄左右调度
/* String filepath = "D:/VS2019/files/video/faceandeye.mp4";
if (!capture.open(filepath))
{
cout << "cannot open file";
return -1;
}*/
VideoCapture capture;
capture.open("http://admin:admin@192.168.43.1:8081"); //用户名+密码+IP地址
if(!(face_dector.load(xmlfilepath)&&right_dector.load(xmlfilepath_right_eye)&& left_dector.load(xmlfilepath_left_eye)))
{
cout << "cannot open xml file";
return -1;
}5、HAAR级联分类器实现人脸跟踪和人眼捕捉
Mat frame,gray;
char c;
while (capture.read(frame))
{
// imshow("Input Video", frame);
flip(frame, frame, 1);
cvtColor(frame, gray, COLOR_BGR2GRAY);
equalizeHist(gray, gray);
vector<Rect> rect;
face_dector.detectMultiScale(gray, rect, 1.1, 3, 0, Size(20, 20));
for (size_t t = 0; t < rect.size(); t++)
{
rectangle(frame, rect[t], Scalar(0, 0, 255));
Rect right_eye_rect;
Rect left_eye_rect;
int offsety = rect[t].height / 4;
int offsetx = rect[t].width / 8;
int eyeheight = rect[t].height/2 - offsety;
int eyewidth = rect[t].width/2 - offsetx;
left_eye_rect.x = rect[t].x + offsetx;
left_eye_rect.y = rect[t].y + offsety;
left_eye_rect.height = eyeheight;
left_eye_rect.width = eyewidth;
Mat left_eye = gray(left_eye_rect);
vector<Rect> left_ROI;
left_dector.detectMultiScale(left_eye, left_ROI, 1.1, 3, 0, Size(20, 20)); //参考xml 给出的最小尺寸
for (size_t i = 0; i < left_ROI.size(); i++)
{
Rect left_rect;
left_rect.x = rect[t].x + left_ROI[i].x+offsetx;
left_rect.y = rect[t].y + left_ROI[i].y+offsety;
left_rect.width = left_ROI[i].width;
left_rect.height = left_ROI[i].height;
rectangle(frame, left_rect, Scalar(0, 255, 255));
}
right_eye_rect.x = rect[t].x + rect[t].width / 2;
right_eye_rect.y = rect[t].y + offsety;
right_eye_rect.height = eyeheight;
right_eye_rect.width = eyewidth;
Mat right_eye = gray(right_eye_rect);
vector<Rect> right_ROI;
right_dector.detectMultiScale(right_eye, right_ROI, 1.1, 3, 0, Size(20, 20)); //参考xml 给出的最小尺寸
for (size_t i = 0; i < right_ROI.size(); i++)
{
Rect right_rect;
right_rect.x = rect[t].x + rect[t].width / 2+right_ROI[i].x;
right_rect.y = rect[t].y + right_ROI[i].y + offsety;
right_rect.width = right_ROI[i].width;
right_rect.height = right_ROI[i].height;
rectangle(frame, right_rect, Scalar(255, 255, 255));
}
}
imshow("Output Video", frame);
c = waitKey(50);
if (c == 27) break;
}
capture.release();
cout << "Hello World!\n";
}6、效果展示

说明
①环境 VS2019+OPENCV420+HUAWEI手机
② xml是官方提供的,准确率没那么高
③眼睛捕捉的没那么准,因为SIze()设置的大了,这里只为了说明IP摄像头的使用,不做修改
④人眼捕捉,有点人体生态学的意味,具体不解释。

















 1008
1008

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









