







1、为什么使用normalization?
主要还是为了克服神经网络难以训练的弊端!internal covariate shift:数据尺度/分布异常,导致训练困难!
具体详解请移步:知乎关于normalization的介绍 讲解的很详细,我这里也不多赘述了!
2、Pytorch中常见的Normalization有哪些?
-
Layer Normalization(LN):BN不适用于变长的网络,如RNN
-
Batch Normalization(BN):
-
Instance Normalization(IN):逐通道计算均值和方差
-
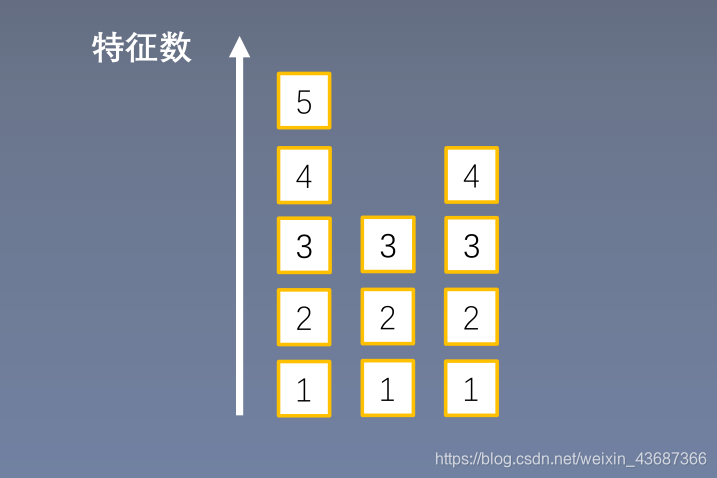
Group Normalization(GN):小batch样本中,BN估计的值不准;数据不够,通道来凑;
它们的相同点就是计算公式都一样,只是其中的均值和方差的计算方式不一样;
下面就一个个来看一下原理和代码实现!
2.1、Layer Normalization(LN)
注意事项:gamma和beta为逐元素的;每一层元素都有属于自己的不同的gamma和beta;
LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True)
其中gamma和beta都是可学习的参数;`affine`选项对每个整个通道/平面应用标量缩放和偏差,“层归一化”使用:参数`elementwise_affine`应用每个元素的缩放和偏差。一般默认是True。参数初始化为1(用于权重)和0(用于偏差)。
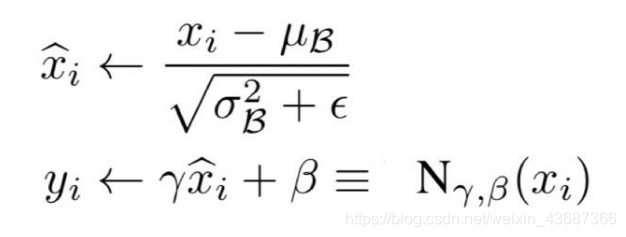
其中的gamma和beta都是逐元素的,逐层计算均值和方差;
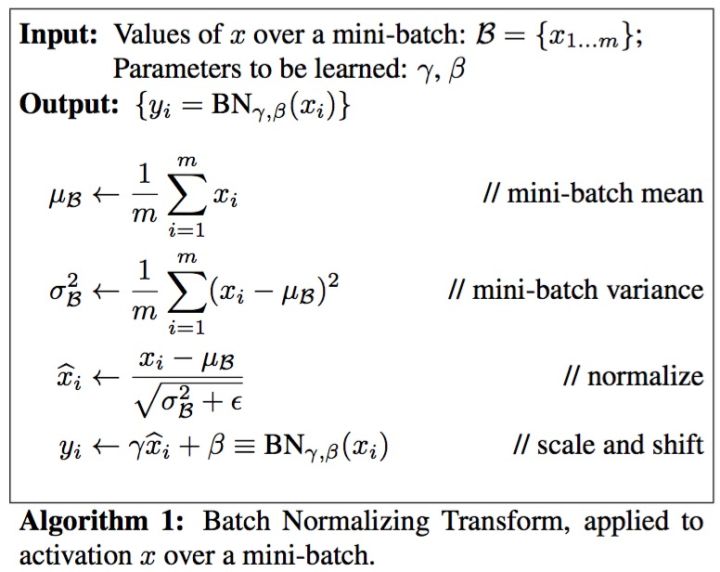
上述公式中的均值E[x]和方差Var[x]通过下面方式计算;
normalized_shape(int或list或torch.Size):来自预期大小的输入的输入形状;
如果使用单个整数,则将其视为一个单例列表,并且此模块将在最后一个预期为该特定大小的维度上进行规范化。
eps:为分数值增加的分母值。 默认值:1e-5
代码实现:
import torch
import numpy as np
import torch.nn as nn
import random
# 设置随机种子
def set_seed(seed=1):
random.seed(seed)
np.random.seed(seed)
torch.manual_seed(seed)
torch.cuda.manual_seed(seed)
set_seed(1)
# Layer Normalization
batch_size = 8
num_features = 6
features_shape = (3,4)
feature_map = torch.ones(features_shape)
# [6,3,4]
feature_maps = torch.stack([feature_map*(i+1) for i in range(num_features)],dim=0)
# [8,6,3,4]
feature_maps_bs = torch.stack([feature_maps for i in range(batch_size)],dim=0)
# 从dim=1开始,进行layerNormalization: [B*C*H*W]
# ln = nn.LayerNorm(feature_maps_bs.size()[1:],elementwise_affine=True)
# ln = nn.LayerNorm(feature_maps_bs.size()[1:],elementwise_affine=False)
ln = nn.LayerNorm([6,3,4])
output = ln(feature_map_bs)
print("layer normalization")
# 当将elementwise_affine设置为False时,就会出错,因为就没有权重初始化,怎么可能有形状,还是使用默认值True
# print(ln.weight.shape)
print(feature_maps_bs.shape)
print(feature_maps_bs[0,...])
print(output[0,...])
layer normalization
torch.Size([8, 6, 3, 4])
tensor([[[1., 1., 1., 1.],
[1., 1., 1., 1.],
[1., 1., 1., 1.]],
[[2., 2., 2., 2.],
[2., 2., 2., 2.],
[2., 2., 2., 2.]],
[[3., 3., 3., 3.],
[3., 3., 3., 3.],
[3., 3., 3., 3.]],
[[4., 4., 4., 4.],
[4., 4., 4., 4.],
[4., 4., 4., 4.]],
[[5., 5., 5., 5.],
[5., 5., 5., 5.],
[5., 5., 5., 5.]],
[[6., 6., 6., 6.],
[6., 6., 6., 6.],
[6., 6., 6., 6.]]])
tensor([[[-1.4638, -1.4638, -1.4638, -1.4638],
[-1.4638, -1.4638, -1.4638, -1.4638],
[-1.4638, -1.4638, -1.4638, -1.4638]],
[[-0.8783, -0.8783, -0.8783, -0.8783],
[-0.8783, -0.8783, -0.8783, -0.8783],
[-0.8783, -0.8783, -0.8783, -0.8783]],
[[-0.2928, -0.2928, -0.2928, -0.2928],
[-0.2928, -0.2928, -0.2928, -0.2928],
[-0.2928, -0.2928, -0.2928, -0.2928]],
[[ 0.2928, 0.2928, 0.2928, 0.2928],
[ 0.2928, 0.2928, 0.2928, 0.2928],
[ 0.2928, 0.2928, 0.2928, 0.2928]],
[[ 0.8783, 0.8783, 0.8783, 0.8783],
[ 0.8783, 0.8783, 0.8783, 0.8783],
[ 0.8783, 0.8783, 0.8783, 0.8783]],
[[ 1.4638, 1.4638, 1.4638, 1.4638],
[ 1.4638, 1.4638, 1.4638, 1.4638],
[ 1.4638, 1.4638, 1.4638, 1.4638]]], grad_fn=<SelectBackward>)
2.2、Batch Normalization(BN)
关于BN,pytorch中提供了三个
- nn.BatchNorm1d
- nn.BatchNorm2d
- nn.BatchNorm3d
(1) nn.BatchNorm1d
BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
表示估计的统计量,
表示新的观测值;均值和标准差在最小批次的每个维度上进行计算,并且
和
都是可学习的参数向量,大小为输入大小;并且
和
的默认值分别为 1 和 0;
动量:momentum默认值为0.1;更新准则为:
其中 是估计值数据,
是新观测值数据;
参数:
num_features:输入大小(N,C,L)中的 C 或者 输入大小(N,L)中的 L;
eps:在公式分母上增加的数值以保证数值稳定性,默认为1e-5;
momentum:用于running_mean和running_var的计算,默认为0.1;
affine:布尔值,设置为True时表示这个模块有可学习的仿射参数,默认也是True;
track_running_stats:设置为True时表示会记录运行时的mean和var,当设置为False时就不会记录;默认为True;
# 输入和输出的尺度是一样的
m = nn.BatchNorm1d(2)
m1 = nn.BatchNorm1d(2,affine=False)
input = torch.randn(2,2)
output = m(input)
output1 = m1(input)
print(output,output1)
print(output.shape,output1.shape)tensor([[ 0.9999, -1.0000],
[-0.9999, 1.0000]], grad_fn=<NativeBatchNormBackward>) tensor([[ 0.9999, -1.0000],
[-0.9999, 1.0000]])
torch.Size([2, 2]) torch.Size([2, 2])
(2) nn.BatchNorm2d
BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
这里的参数和上述BatchNorm1d的情况是一样的
# 输入和输出的形状是一样的:[N,C,H,W] => [N,C,H,W]
# 因为Batch Normalization是在通道 C维度上计算统计量,因此也称为Spatial Batch Normalization
m = nn.BatchNorm2d(2, affine=False)
input = torch.randn(2,2,3,3)
output = m(input)
print(output)(3) nn.BatchNorm3d
# [N, C, D, H, W] 输入等于输出
m = nn.BatchNorm3d(100)
input = torch.randn(20,100,35,45,10)
output = m(input)
print(output.shape)2.3、Instance Normalization(IN)
起因:BN在图像生成中不适用
思路:逐通道计算均值和方差
主要参数:
num_features:一个样本特征数量
eps:分母修正项
momentum:指数加权平均估计当前mean和var
affine:是否需要affine transform
track_running_stats:是训练状态,还是测试状态
m = nn.InstanceNorm2d(2)
input = torch.randn(2,2,3,3)
output = m(input)
print(output.shape)torch.Size([2, 2, 3, 3])
2.4、Group Normalization(GN)
GroupNorm(num_groups, num_channels, eps=1e-05, affine=True)
主要参数:
num_groups:分组数
num_channels:通道数(特征数)
eps:分母修正项
affine:是否需要affine transform
input = torch.randn(2,6,10,10)
# 将6通道分为3组
m = nn.GroupNorm(3,6)
# 将6通道分为6组
m1 = nn.GroupNorm(6,6)
# 将6通道分为1组
m2 = nn.GroupNorm(1,6)
output = m(input)
print(output.shape)总结:总的来说,只要搞懂一个,其他几个参数基本上都是差不多,最大的不同点就是它们计算均值和方差的方式不同;



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











