






前言
本文代码链接:十大经典排序算法
提取码:2ok3
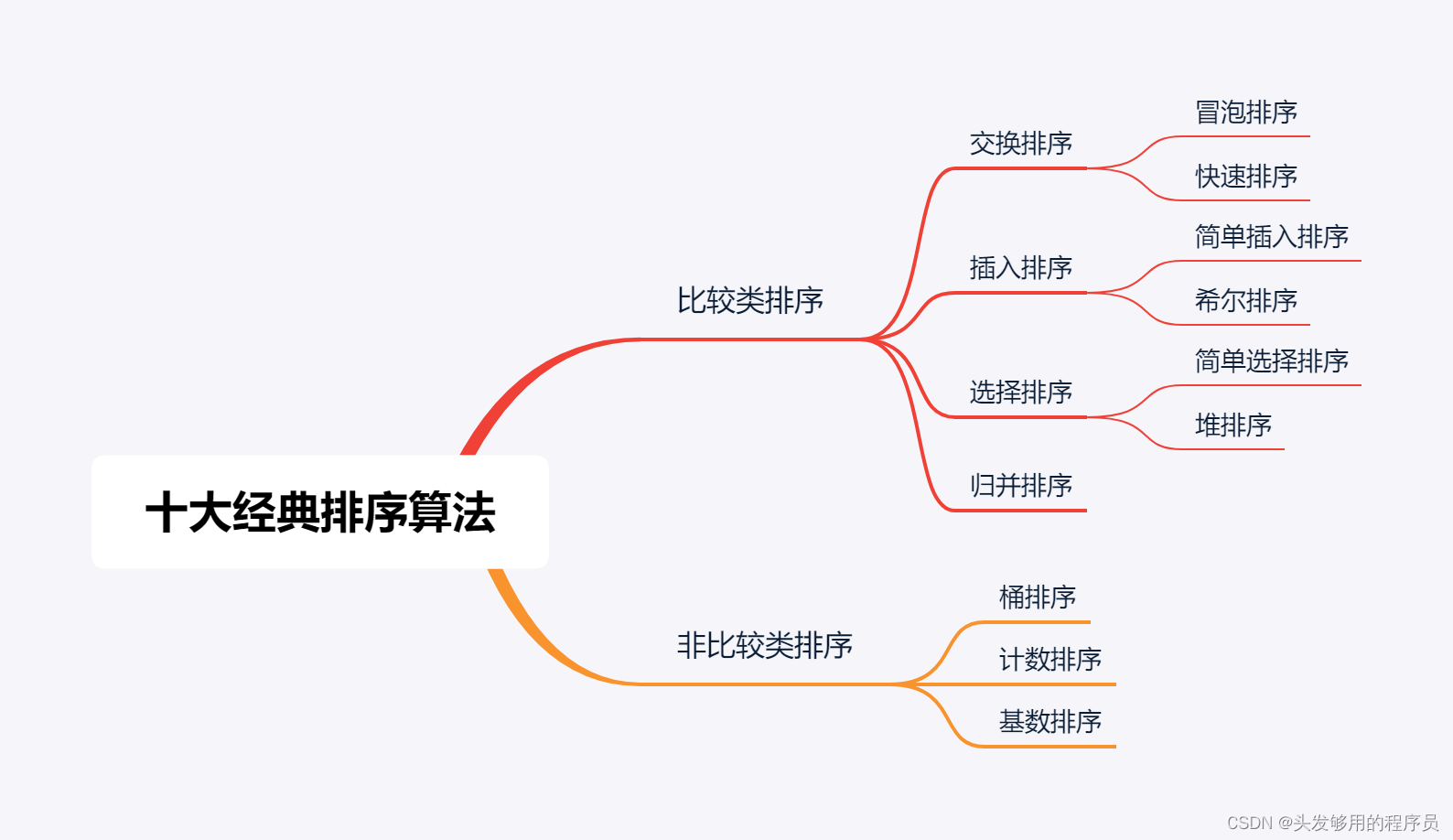
排序算法是《数据结构与算法》的重要组成部分,在项目实践中,很多时候都需要用到排序算法,而常见的经典排序算法也是很多公司程序员面试的重点。十大经典排序算法如下图所示。
时间复杂度和空间复杂度是衡量一个算法性能好坏的重要指标。而对于排序算法而言,稳定性也是重要指标之一。
教材上给了非常严谨且抽象的定义。
假设ki=kj(1<=i<=n,1<=j<=n,i≠j),且在排序前的序列中ri领先于rj,若果排序后ri仍然领先于rj,则称所用的排序方法是稳定的;反之,若可能使得排序后的序列中rj领先于ri,则称所用的排序方法是不稳定的。
通俗地说,有时候在原序列中两个数值是相等的,如果排序后可以保证原来的相对位置不变,则称该算法是稳定的,若不能保证,则算法是不稳定的。
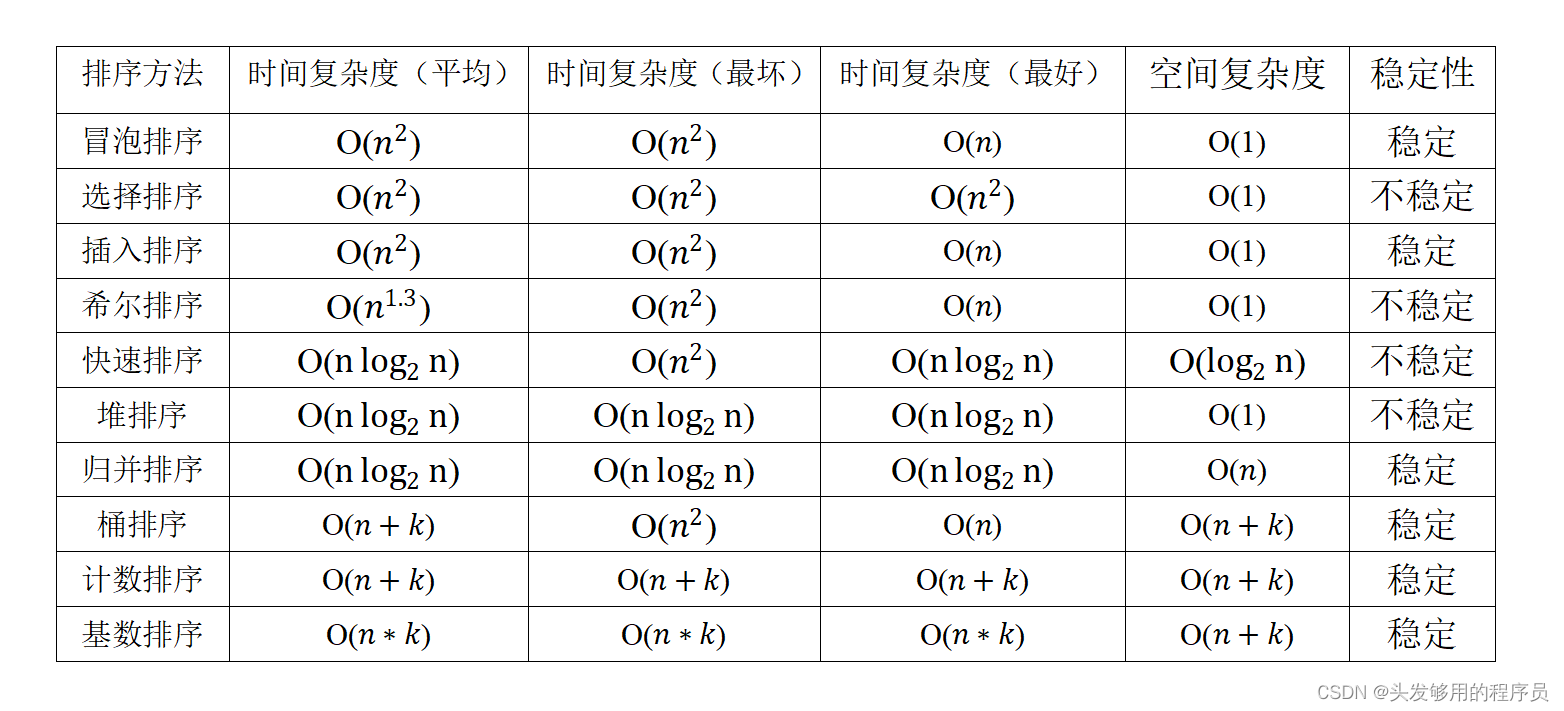
关于算法的时间复杂度,空间复杂度,稳定性,见下面表格。
1 冒泡排序
冒泡排序是一种交换排序,其基本思想是:两两比较相邻记录的关键字,如果相反则交换,直到没有反序的记录为止。
因较小的数字如同气泡一般慢慢浮到上面,故而得名冒泡排序。
1.1 最简单的排序算法
代码如下:
#include <stdio.h>
#define MAXSIZE 10000
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
void Bubblesort0(sqList* L)
{
for (int i = 0; i < L->length; i++)
{
for (int j = i; j < L->length; j++)
{
if (L->r[i] > L->r[j])
swap(L, i, j);
}
}
}
int main()
{
sqList test = {{9,1,5,8,3,7,4,6,2}, 9};
Bubblesort0(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
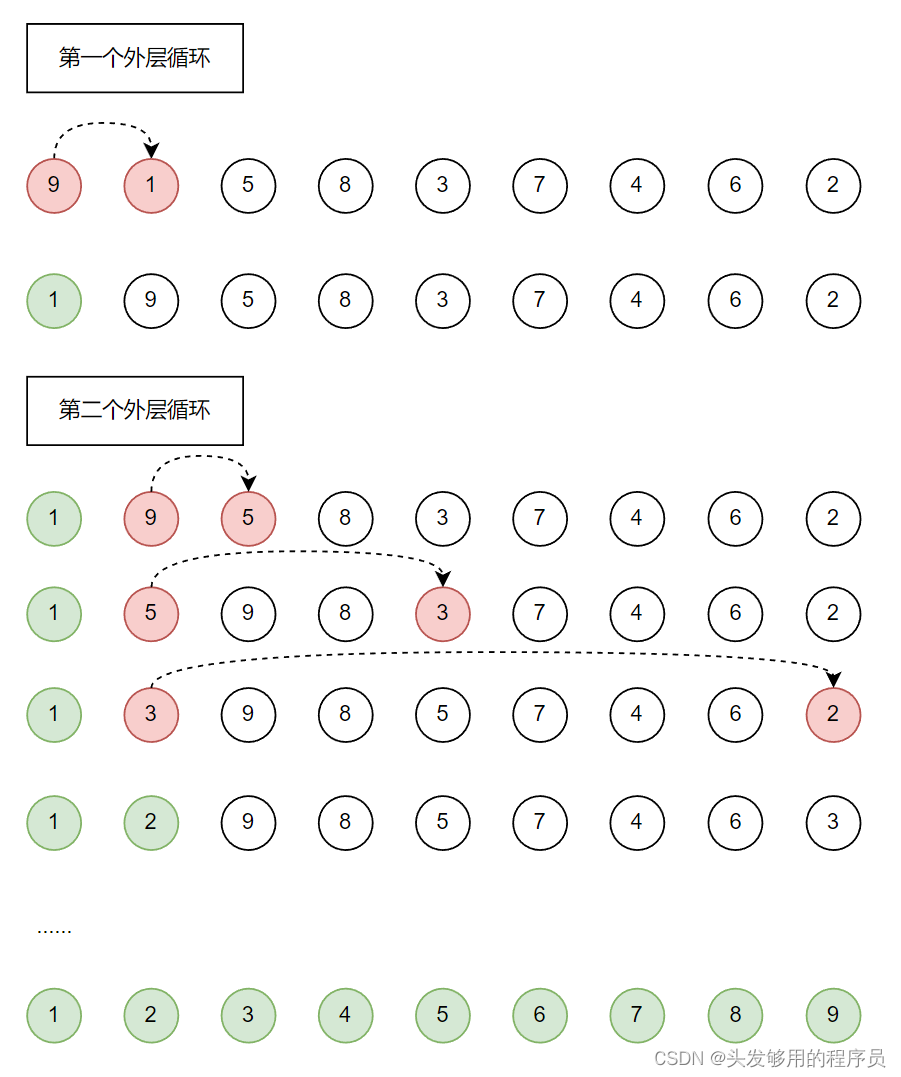
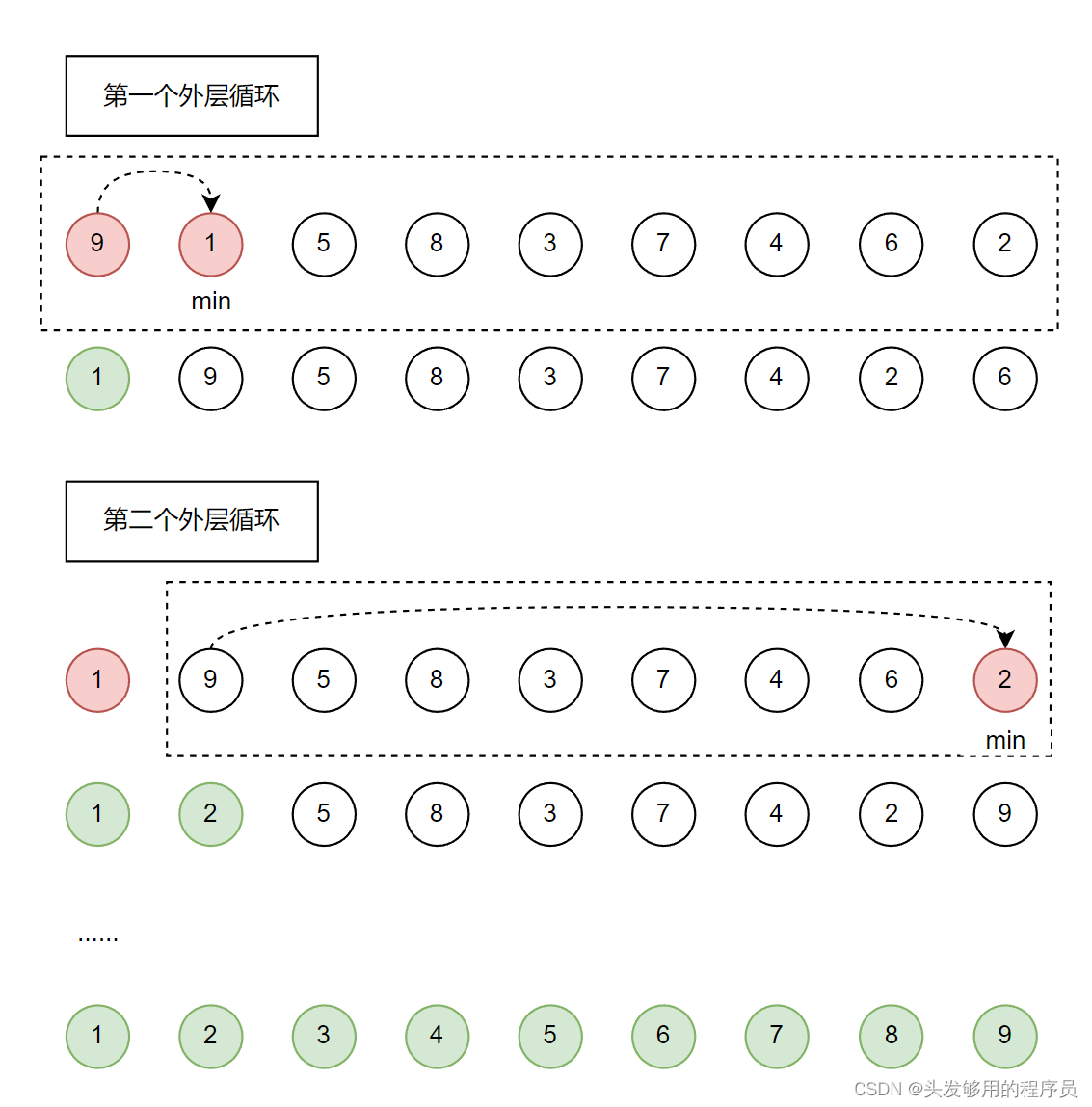
以上是最简单的冒泡排序算法的实现,每次循环保证得到该范围内的最小值,排在前面,从而完成排序。如图所示:
然而还有改进的空间。是否可在每次循环的时候,比较更多的关键字呢?于是有了改进版的冒泡排序。
1.2 冒泡排序算法
通过以上的改进思路,可以得到一下的代码。
#include <stdio.h>
#define MAXSIZE 10000
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
void Bubblesort1(sqList* L)
{
for (int i = 0; i < L->length; i++)
{
for (int j = L->length - 2; j >= i; j--)
{
if (L->r[j] > L->r[j+1])
swap(L, j, j + 1);
}
}
}
int main()
{
sqList test = {{9,1,5,8,3,7,4,6,2}, 9};
Bubblesort1(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
通过以上的改进,在每次循环时,可以比较相邻的关键字,从而变得更加高效。如下图所示:
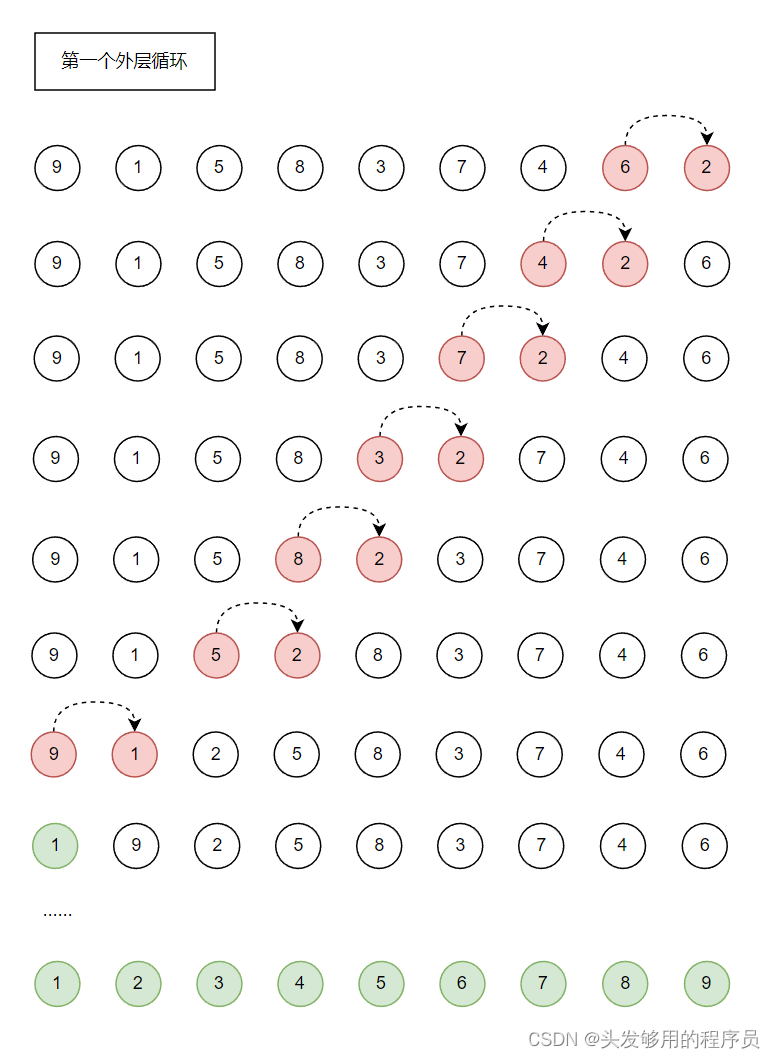
从上图可以看出,一次循环就可以比较更多的数值。所以是个更好的方法。
1.3 冒泡排序算法优化
上面的例子虽然是正宗的冒泡排序算法,但是仍然有改进的空间,如果能在需要排序的数组有序的时候停止循环,肯定会更加高效,于是有了下面的代码。
#include <stdio.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
void Bubblesort2(sqList* L)
{
short flag = TRUE;
for (int i = 0; i < L->length && flag; i++)
{
flag = FALSE;
for (int j = L->length - 2; j >= i; j--)
{
if (L->r[j] > L->r[j + 1])
{
swap(L, j, j + 1);
flag = TRUE;
}
}
}
}
int main()
{
sqList test = {{9,1,5,8,3,7,4,6,2}, 9};
Bubblesort2(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
这样一来就避免了无意义的循环,如果上次发现算法已经完成了排序,程序就不会进入循环,从而提前结束运行,完成排序任务。
1.4 冒泡排序算法总结
冒泡算法是最常用的算法之一,也是最简单的排序算法之一,但却不是最高效的,以下将介绍其他几种排序算法。
2 选择排序
选择排序的方法也非常好理解,但它并不像冒泡排序一样,遇到顺序不合适的就直接调换位置,而是记录下最小关键字的位置,待循环完毕后再将其与此次循环的第一个关键字的位置做调换,从而保证了每次循环都可以得到该范围内的最小值,故而得名选择排序。
2.1 选择排序的代码实现
具体的实现代码如下。
#include <stdio.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
void SelectSort(sqList *L)
{
int i, j, min;
for (i = 0; i < L->length; i++)
{
min = i;
for (j = i + 1; j < L->length; j++)
{
if (L->r[min] > L->r[j])
min = j;
}
if (i != min)
swap(L, i, min);
}
}
int main()
{
sqList test = {{9,1,5,8,3,7,4,6,2}, 9};
SelectSort(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
通俗地理解,就是不轻易“出手”,外部循环一次,最多调换一次,所以相比冒泡排序稍微高效一些。选择排序的过程如下图所示:
2.2 选择排序算法总结
虽然选择排序比冒泡排序高效一些,但仍然是n2的时间复杂度。
3 插入排序
插入排序又叫直接插入排序或者简单插入排序,这样称呼其实是为了与希尔排序进行区分,其实是同一种排序算法。
所谓插入排序,是将一个记录插入到已经排好序的有序表中,从而得到一个新的,记录数值增1的有序表。
3.1 插入排序的代码实现
插入排序的具体代码如下所示。
注意在插入排序中有个辅助空间,所以数组的第一个元素值为0,排序后的值无效。
#include <stdio.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void InsertSort(sqList *L)
{
int i, j;
for (i = 2; i < L->length; i++)
{
if (L->r[i] < L->r[i - 1])
{
L->r[0] = L->r[i];
for (j = i - 1; L->r[j] > L->r[0]; j--)
L->r[j + 1] = L->r[j];
L->r[j + 1] = L->r[0];
}
}
}
int main()
{
sqList test = {{0,9,1,5,8,3,7,4,6,2}, 10};
InsertSort(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
插入排序的算法思想可简单理解为,首先确定需要排序的关键字,然后再放到整个数组的第一个位置,再将其放回原数组中,放回的时候进行排序,但只保证该位置及其前面关键字的相对位置没有问题。
如图所示:
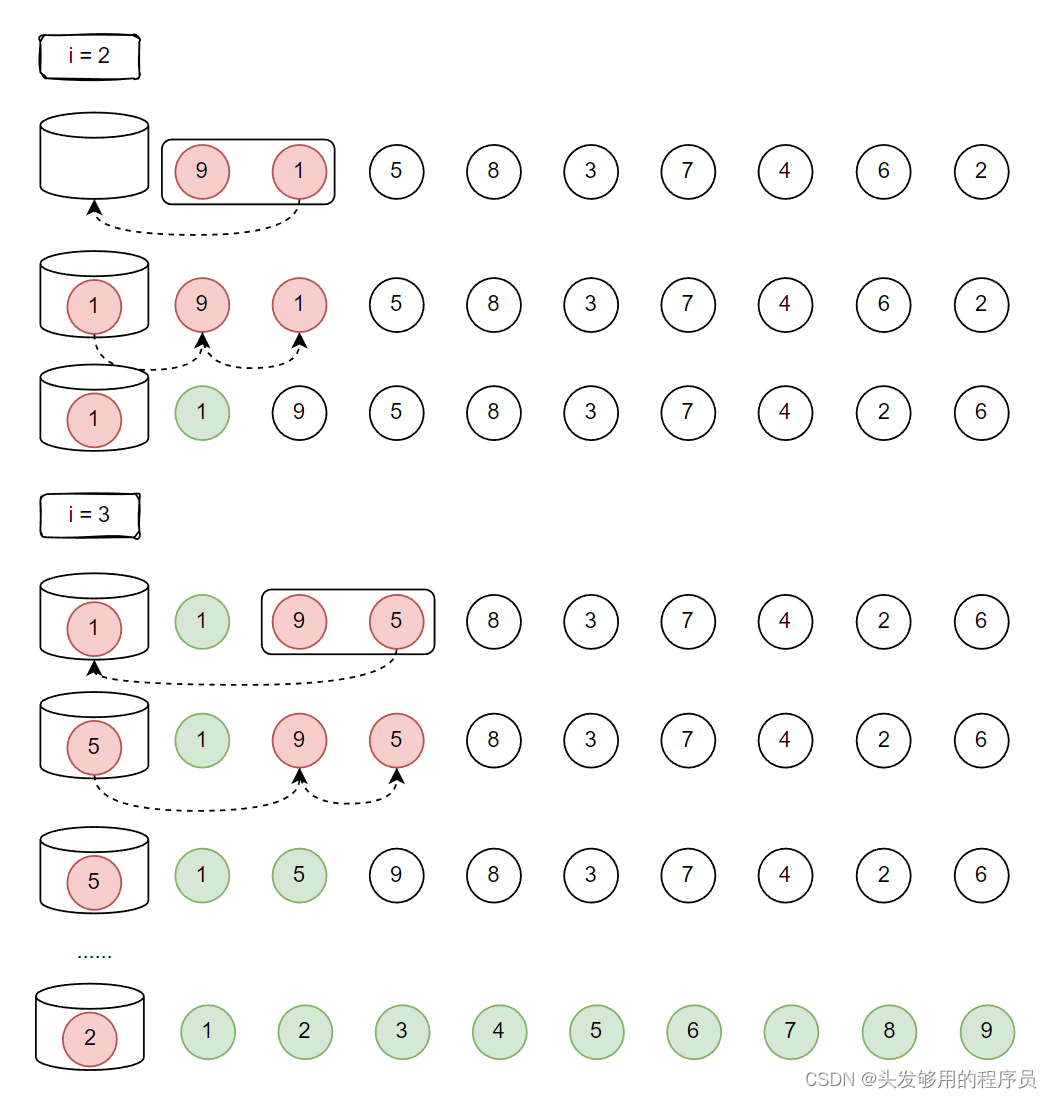
从上图中可以看出,所谓的插入排序,是两两进行比较,若发现顺序相反,则将其放入辅助空间中,然后调整其他元素的位置,找到合适的位置插入,从而完成此次排序。
3.2 插入排序算法总结
与冒泡排序和选择排序算法不同的是,插入排序算法需要一个额外的空间来存储数据,但其性能比前两者要稍微好一些,平均比较和移动的次数约为(n2)/4。
4 希尔排序
希尔排序是D.L.Shell于1959年提出的一种排序算法,希尔排序是第一批突破平方阶时间复杂度的算法之一。
4.1 希尔排序的代码实现
在希尔排序中,需要设置一个增量,然后使其逐渐较小到1,从而顺利完成排序任务。具体实现的代码如下。
#include <stdio.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
void ShellSort(sqList *L)
{
int i, j, k = 0;
int increment = L->length;
do
{
increment = increment / 3 + 1;
for (i = increment + 1; i <= L->length; i++)
{
if (L->r[i] < L->r[i - increment])
{
L->r[0] = L->r[i];
for (j = i - increment; j > 0 && L->r[0] < L->r[j]; j -= increment)
L->r[j + increment] = L->r[j];
L->r[j + increment] = L->r[0];
}
}
}
while (increment > 1);
}
int main()
{
sqList test = {{0,9,1,5,8,3,7,4,6,2}, 9};
ShellSort(&test);
for (int i = 0; i <= test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
从代码中可以看出,希尔排序与插入排序有相似之处,又或者说,希尔排序是一种特殊的插入排序,与插入排序相比,希尔排序是每间隔几个数进行比较大小的,然后每循环一次,间隔减一,直到为0,完成排序。如下图所示:

4.2 希尔排序算法总结
同插入排序类似,希尔排序仍然需要一个辅助空间,但其时间复杂度要小一些。有的说法是n1.3,有的说法是n1.5。但肯定优于前三种排序算法。
5 堆排序
堆排序是利用推进行排序的一种算法。
堆排序的基本思想是,将待排序的序列构造成一个大顶堆。此时,整个序列的最大值就是堆顶的根节点。将它移走,然后将剩余的n-1个序列重新构造成一个堆,这样就会得到n个元素中的次大值。如此反复执行,便能得到一个有序序列了。
5.1 堆简介
堆(数据结构)是具有下列性质的完全二叉树;每个结点的值都大于或者等于其左右孩子结点的值,成为大顶堆;或者每个结点的值都小于或者等于其左右孩子结点的值,称为小顶堆。
从这里也可以看出,推是一种特殊的二叉树。此次排序用的堆是大顶堆。
5.2 堆排序的代码实现
推排序的代码实现如下所示。
#include <stdio.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
//本函数调整L->r[s]的关键字,使L->r[s..m]成为一个大顶堆
void HeapAdjust(sqList *L, int s,int m)
{
int temp, j;
temp = L->r[s];
for (j = 2 * s; j <= m; j *= 2) //沿关键字较大的孩子结点向下筛选
{
if (j < m && L->r[j] < L->r[j + 1]) //左孩子的值应小于右孩子
++j; //j的位置变为右孩子,也就是较大值的位置
if (temp >= L->r[j]) //当前结点的值应该大于等于孩子结点的值
break;
L->r[s] = L->r[j];
s = j;
}
L->r[s] = temp;
}
void HeapSort(sqList *L)
{
int i;
//构建大顶堆
for (i = L->length / 2; i > 0; i--)
HeapAdjust(L, i, L->length);
//排序
for (i = L->length; i > 1; i--)
{
//将堆顶记录和当前未经排序子序列最后一次记录交换
swap(L, 1, i);
//将其重新调整为大顶堆
HeapAdjust(L, 1 ,i - 1);
}
}
int main()
{
sqList test = { {0,50,10,90,30,70,40,80,60,20}, 9 };
HeapSort(&test);
for (int i = 0; i <= test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
堆排序的算法有点难理解,大致过程是这样的。
- 构建大顶堆;
- 将大顶堆上的根节点(最大值)取出,然后调整大顶堆,这样就可以取出次大值,直到将所有值取出。
下面我们借助图来理解整个堆排序的详细过程。
5.2.1 堆的构建过程

如上图所示,绿色为非叶子结点,也就是调用HeapAdjust的时候,传的第二个参数所指的位置。先调整编号4为根节点的子树。调整过程大概如下:
if (j < m && L->r[j] < L->r[j + 1]) //左孩子的值应小于右孩子
++j; //j的位置变为右孩子,也就是较大值的位置
以上语句就是检查左子树是否小于右子树的,若小于则指向右孩子结点。显然此时不满足,继续往下运行(也就是说,j指向了较大值所在的孩子结点);
if (temp >= L->r[j]) //当前结点的值应该大于等于孩子结点的值
break;
若根节点大于孩子结点,则满足要求,运行结束。此时显然不满足。继续往下运行;
L->r[s] = L->r[j];
s = j;
将较大的值赋予根节点(局部);继续往下运行;j = 16,不满足条件,跳出循环。继续往下运行;
L->r[s] = temp; //插入新值
也就是L->r[8] = 3;此次调用执行结束。
第二次和第三次调用于此类似,如下所示:

因为3号节点本身就符合要求,因此第二次调用不做改变。
第四次调用稍微麻烦一些:

因为这里做了两次循环,且对节点进行了重新赋值。至此,大顶堆构建结束。
5.2.2 堆排序过程
如果将核心思想看懂了,堆的排序过程就变得容易了(图片仅用来说明第一次HeapAdjust函数调用的运行过程,剩下的可自己推理)。如下图所示:

首先,整个大顶堆的根节点肯定是最大值,所以将其放在最后,并对其他部分进行调整(排序),再将值逐个取出,即可完成排序过程。
5.3 堆排序算法总结
总体来说,堆排序的时间复杂度为O(nlongn)。这在性能上显然要远远好过冒泡,选择,插入排序算法了。而且空间复杂度也比较低。
另外,构建堆比较麻烦,因此,它并不合适待排序序列个数比较少的情况。
6 归并排序
前面讲了归并排序,不过堆的构建分身比较麻烦,有没有排序快并且不用这么麻烦的算法呢?归并排序就是一个。
归并排序,就是利用归并的思想实现的排序方法。基本原理是,假设初始记录含有n个记录,则可以看作n个有序的子序列,每个子序列的长度为1,然后两两归并,得到长度为2或者1的子序列;两两归并,如此重复,直至得到一个长度为n的有序序列为止,这种排序方法成为2路归并排序。
有2路归并,自然就有多路归并,本文仅介绍2路归并排序算法。
6.1 归并排序的代码实现
归并排序的实现代码如下。
#include <stdio.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void Merge(int SR[], int TR[], int i, int m, int n)
{
int j, k, l;
//将SR中的记录由小到大地并入TR
for (j = m + 1, k = i; i <= m && j <= n; k++)
{
//哪个值小就归并哪个值,直至归并完成
if (SR[i] < SR[j])
TR[k] = SR[i++];
else
TR[k] = SR[j++];
}
//将剩余的SR[i,m]区间的数值复制到TR
if (i <= m)
{
for (l = 0; l <= m - i; l++)
TR[k + l] = SR[i + l];
}
//将剩余的SR[j,n]区间的数值复制到TR
if (j <= n)
{
for (l = 0; l <= n - j; l++)
TR[k + l] = SR[j + l];
}
}
void Msort(int SR[], int TR1[], int s, int t)
{
int m;
int TR2[MAXSIZE + 1];
if (s == t)
TR1[s] = SR[s];
else
{
m = (s + t) / 2; //将SR[s,t]区间平分为[s,m]和[m+1,t]
Msort(SR, TR2, s, m); //递归地将SR[s,m]归并为有序的TR2[s,m]
Msort(SR, TR2, m + 1, t); //递归地将SR[m+1,t]归并为有序的TR2[m+1,t]
Merge(TR2, TR1, s, m, t); //将TR2[s,m]和TR2[m+1,t]归并到TR1[s,t]
}
}
void MergeSort(sqList* L)
{
Msort(L->r, L->r, 0, L->length - 1);
}
int main()
{
sqList test = { {50,10,90,30,70,40,80,60,20}, 9 };
MergeSort(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
归并排序的基本过程如下图所示:
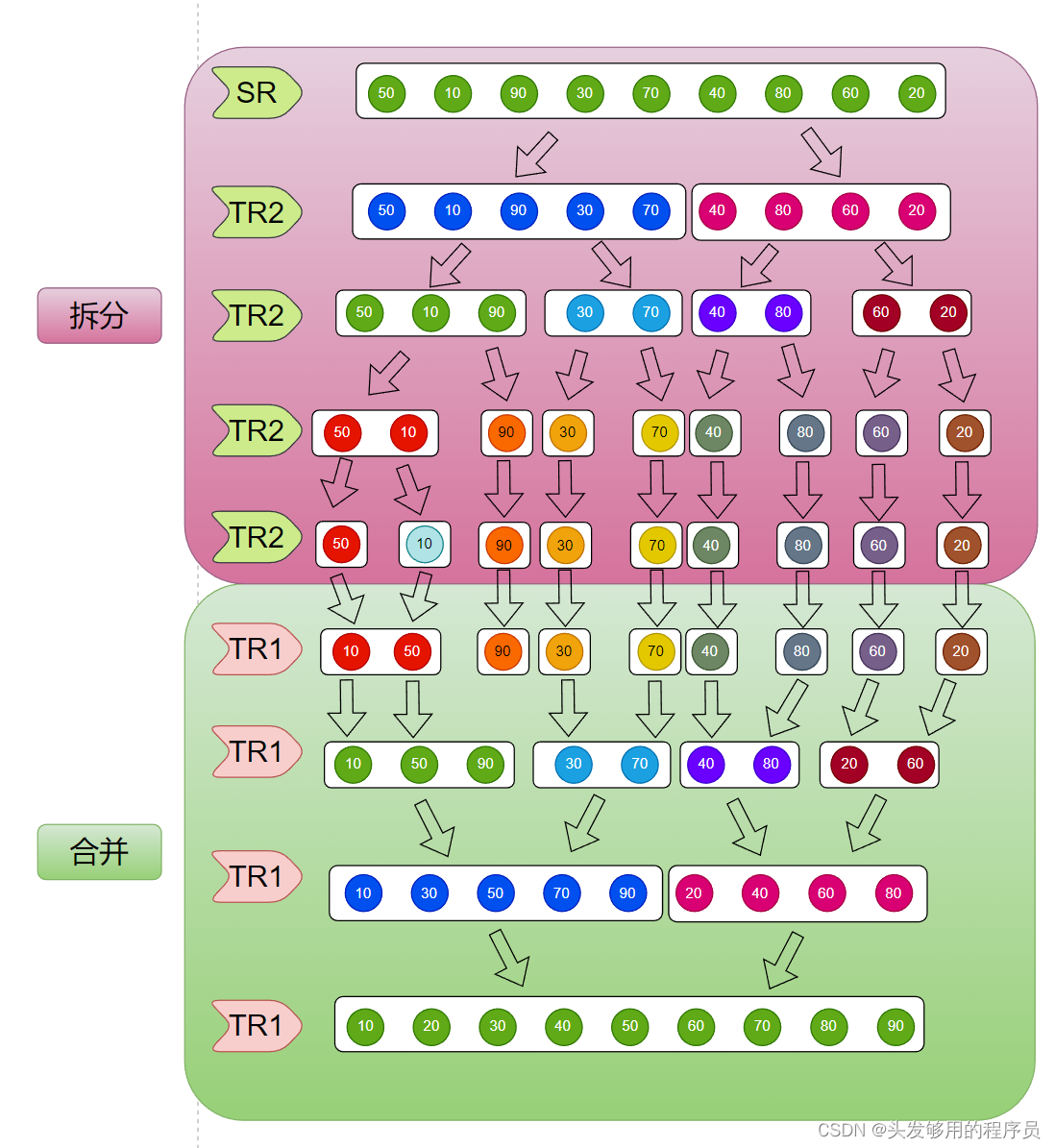
从上图可以发现,归并排序分成两个过程,分别是拆分和合并,在合并的过程中逐步将数据进行排序。
归并排序程序的主体部分如下:
void Msort(int SR[], int TR1[], int s, int t)
{
int m;
int TR2[MAXSIZE + 1];
if (s == t)
TR1[s] = SR[s];
else
{
m = (s + t) / 2; //将SR[s,t]区间平分为[s,m]和[m+1,t]
Msort(SR, TR2, s, m); //递归地将SR[s,m]归并为有序的TR2[s,m]
Msort(SR, TR2, m + 1, t); //递归地将SR[m+1,t]归并为有序的TR2[m+1,t]
Merge(TR2, TR1, s, m, t); //将TR2[s,m]和TR2[m+1,t]归并到TR1[s,t]
}
}
从代码中可以发现,该程序采用了递归,每次都可以将区间分成两半,而Merge函数并未参与到“递”的过程,在此拆分过程中,递归的结束条件是s==t,也就是该区间无法再次拆分的时候,“递”过程结束。
而在“归”的过程中,就有了Merge函数的参与,而“归”是“递”的逆过程,所以此时究竟应该合并哪几个数,在“递”的过程中就已经决定了,只需逆向执行并排序即可。
Merge函数也很好理解,将TR2[s,m]和TR2[m+1,t]归并到TR1[s,t],哪个值小就先放哪个,并将访问位置后移,如果有一个区间的值提前归并完成,则结束循环,然后将剩下的值复制过去即可。
6.2 归并排序算法总结
归并排序在没有堆排序那么复杂的构建堆的过程前提下,使其拥有了与堆排序相当的时间复杂度。但其需要分配额外空间去存储拆分出来的元素。
归并排序采用将待排序序列进行拆分,再重组的思想简单而高效,这在很多种排序算法中都可以看到。属于典型的空间换时间。
空间换时间是算法里最重要的思想之一。指的是当内存空间充足的时候,为了追求代码的执行速度,可以舍弃对存储空间的要求,从而追求效率。
7 快速排序
快速排序算法最早是由图灵奖获得者Tony Hoare设计出来的,是20世纪最伟大的计算机科学家之一。快速排序在求职面试中是最常考的排序算法之一。
其基本思想是:通过一趟排序将待排记录分割成独立的两部分,其中一部分记录的关键字均比另一部分的关键字小,则可分别对这两部分记录进行排序,以达到整个序列有序的目的。
既然名曰快速排序,在排序速度上至少应该比前面的冒泡,选择和插入排序快,事实的确如此,具体的时间复杂度可以看文章开头的表格。
7.1 快速排序的代码实现
快速排序的代码实现如下。
#include <stdio.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
//交换顺序表L中子表的记录,使枢轴记录到位,并返回其所在位置,
// 此时在它前的数值均小于它
//在它后面的数值均大于它
int Partition(sqList *L, int low, int high)
{
int pivotkey;
pivotkey = L->r[low]; //枢轴初始化
//从两端交替得往中间扫描
while (low < high)
{
while (low < high && L->r[high] >= pivotkey)
high--;
swap(L, low, high); //将比枢轴小的值前移
while (low < high && L->r[low] <= pivotkey)
low++;
swap(L, low, high); //将比枢轴大的值后移
}
return low;
}
void QSort(sqList *L, int low, int hight)
{
int pivot;
if (low < hight)
{
pivot = Partition(L, low, hight);
QSort(L, low, pivot - 1);
QSort(L, pivot + 1, hight);
}
}
void QuickSort(sqList *L)
{
QSort(L, 0, L->length - 1);
}
int main()
{
sqList test = { {9,1,5,8,3,7,4,6,2}, 9 };
QuickSort(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
从以上程序中可以看出,在快速排序中,首先要选取枢轴,然后比其小的放在它的前面,比其大的放在后面。让我们分析在Partition函数第一次被调用时的情况。
具体运行情况如下图所示:
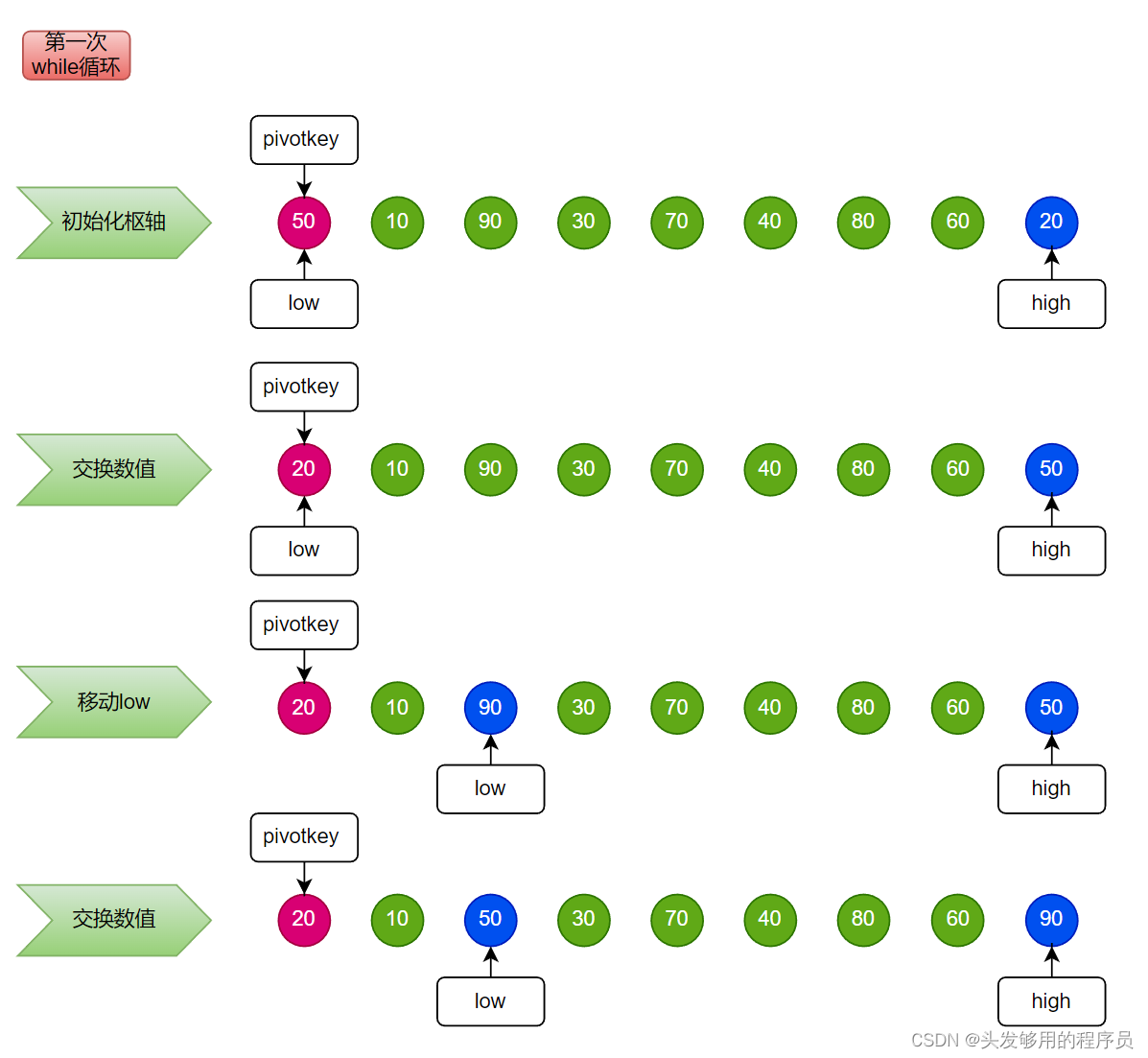
具体执行步骤如下:
- 首先要初始化枢轴,然后将数组其最大和最小位置分别标记为
low和high。 - 然后移动
high标记,比枢轴大则移动,直至比枢轴小,然后交换low和high的位置。 - 再移动
low标记,比枢轴小则移动,直至比枢轴大,然后交换low和high的位置。
从此就可以看到在low位置之前的数值都比low所指的数值小,而high未移动,因而暂时不能说明问题,来看第二次循环。
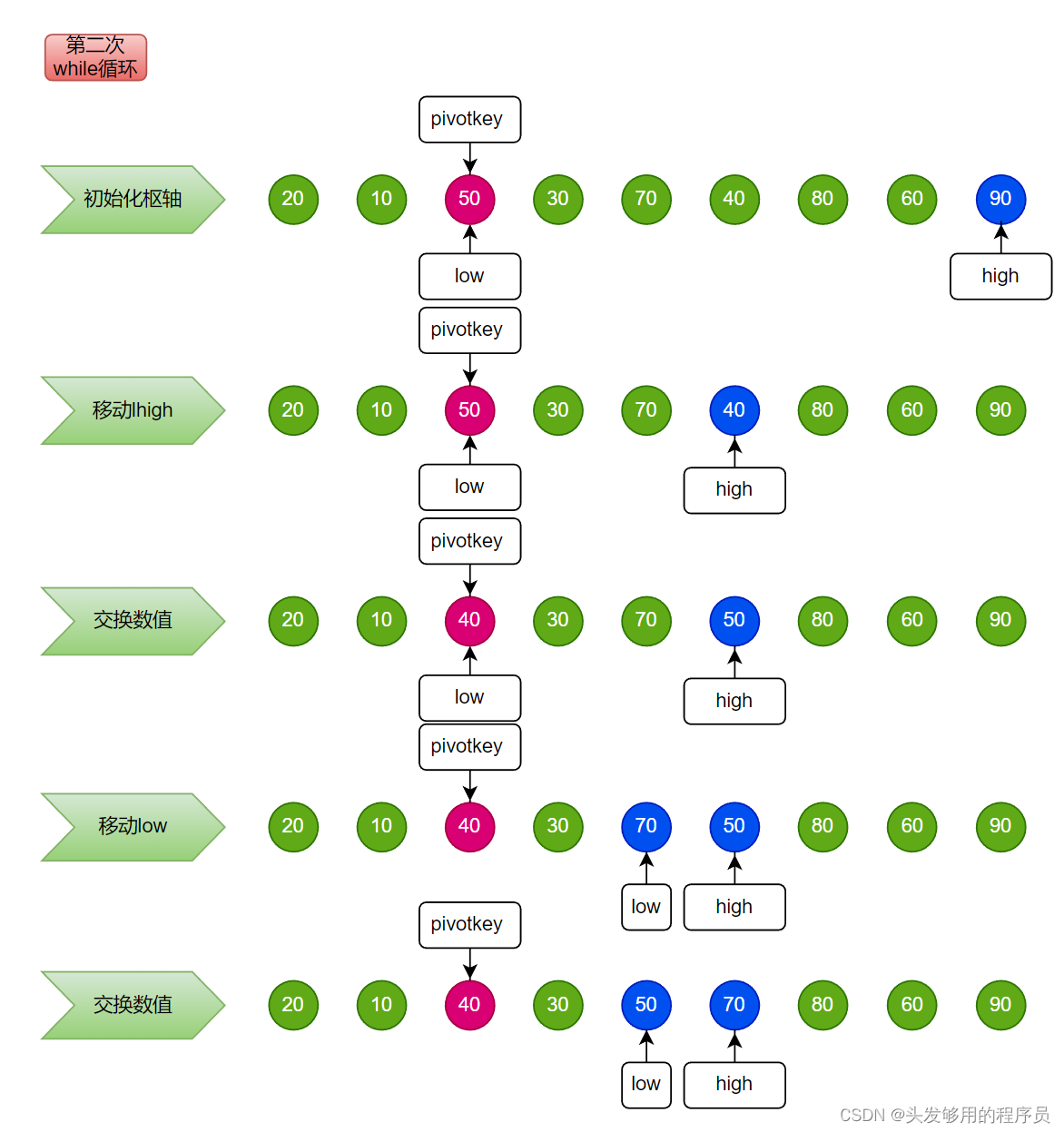
第二次循环伊始,枢轴放在了low的位置。然后执行相同的流程,发现在low之前的数值都比low所指的数值小,而在high所指及其后面位置的数值,均比low所指的大。
而我们函数返回的数值恰好就是low的数值,也就是整个数组的“分水岭”。然后一直递归,也就是对枢轴的前后两个部分做同样的处理,以此类推,直到low==hight,然后调用返回,返回结束,则排序结束。
7.2 快速排序算法总结
作为最经典,也是面试最常考的排序算法之一,在同样的时间复杂度下,快速排序算法既不需要堆排序那么复杂的堆构建过程,也没有归并排序那么高的空间复杂度。被誉为20世纪十大算法之一,确实有其精妙之处。
8 桶排序
8.1 桶排序的代码实现
桶排序的代码实现如下。
#include <stdio.h>
#include <malloc.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
#define BUCKETNUM 3
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
void BucketSort(sqList *L)
{
//定义两个变量分别存储原数组中的最大和最小值
int max = L->r[0];
int min = L->r[0];
for (int i = 1; i < L->length; i++)
{
if (L->r[i] > max)
max = L->r[i];
if (L->r[i] < min)
min = L->r[i];
}
//根据最大最小值以及桶的个数划分桶里的数据
const int bucket_num = 3;
//根据大小将所有数共分为10个区间,属于某个区间的就放入某个桶里
int leng = max - min + 1; //数组元素的区间长度
int bucket_size = leng / bucket_num; //每个桶的数值范围大小
//创建3个桶
int bucket[BUCKETNUM][MAXSIZE];
//记录每个桶中存入数据的数量
int bucket_sum[BUCKETNUM];
//桶的初始化
for (int i = 0; i < BUCKETNUM; i++)
{
for(int j = 0; j < MAXSIZE; j++)
bucket[i][j] = 0;
}
//计数数组初始化
for (int i = 0; i < BUCKETNUM; i++)
bucket_sum[i] = 0;
//入桶
for (int i = 0; i < L->length; i++)
{
int index = (L->r[i] - min) / bucket_size;
bucket[index][bucket_sum[index]++] = L->r[i];
//在元素插入桶的时候使用冒泡排序
for (int j = bucket_sum[index] - 1; j > 0; j--)
{
if (bucket[index][j] < bucket[index][j - 1])
{
int temp = bucket[index][j];
bucket[index][j] = bucket[index][j - 1];
bucket[index][j - 1] = temp;
}
}
}
//入桶完毕后,就会得到是个有序的桶,顺序访问桶就能得到有序的数组
int arr_index = 0;
for (int i = 0; i < bucket_num; i++)
{
for (int j = 0; j < bucket_sum[i]; j++)
L->r[arr_index++] = bucket[i][j];
}
}
int main()
{
sqList test = { {99,11,52,83,36,77,4,63,28}, 9 };
BucketSort(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
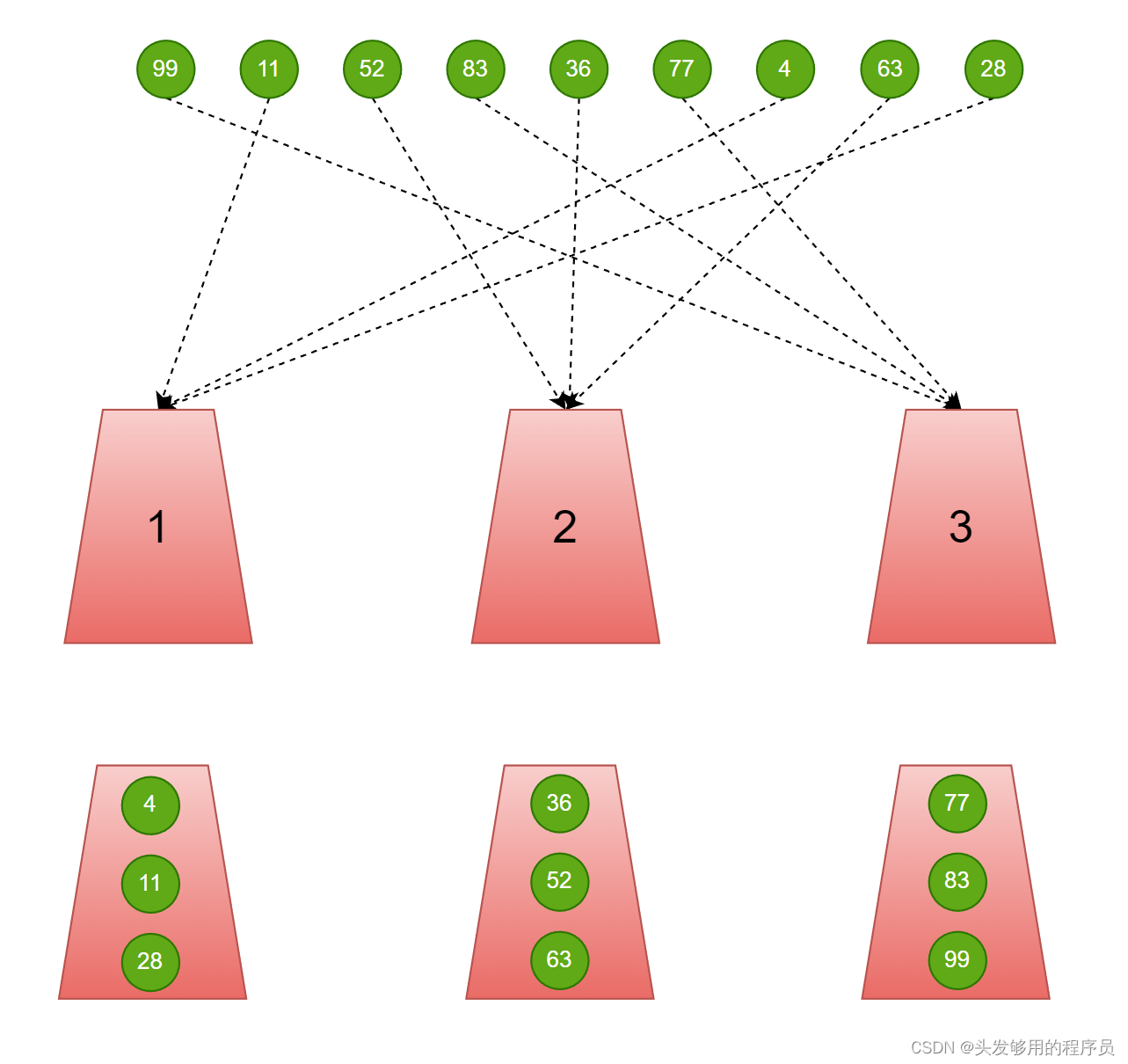
从以上代码可以看出,整个流程可以分成一下几步:
- 算出待处理序列中的最小值和最大值,并求出取值范围;
- 根据数据的取值范围,求出每个桶可容纳的数值范围大小;
- 创建桶,并初始化;
- 根据每个元素的数值大小分配具体的桶;
- 将元素放入桶中,顺便对该桶中的元素进行排序;
- 将桶内元素取出,即为有序序列。
如下图所示:
注意每个数值应该放入第几个桶,是根据数值的大小 分布情况来定的。所以一下程序非常重要:
//根据大小将所有数共分为10个区间,属于某个区间的就放入某个桶里
int leng = max - min + 1; //数组元素的区间长度
int bucket_size = (leng + bucket_num - 1) / bucket_num; //每个桶的数值范围大小(进一法)
以及:
int index = (L->r[i] - min) / bucket_size;
8.2 桶排序算法总结
桶排序的主要思想是将待排序的数组划分到桶中,至于每个桶中具体的排序算法,可视具体情况而定,桶排序是将数据进行拆分,排序,然后再组合,从而达到了加速的目的。
桶排序的缺点也非常明显,就是对具体数值的大小非常敏感,而当值域很大且分布不均匀时,就会出现桶内数据数量的不均匀,从而导致排序效果变差。比方说下面一组数据:
sqList test = { {99,98,97,8,3,7,4,95,28}, 9 };
在将数据全部放入桶中,出现了下面这种情况:

也就是说,出现了桶的分配不均这种情况,甚至出现空桶。
9 基数排序
虽然基数排序被定义为非比较类排序,但其主要思想还是比较,只不过不是直接比较,而是先将序列记录关键字的各个位位值进行比较,先将个位进行比较和排序,然后是十位,直到关键字最大数值的最高位,从而完成排序。
9.1 基数排序的代码实现
基数排序的代码实现如下。
#include <stdio.h>
#include <malloc.h>
#include <math.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void RadixSort(sqList* L)
{
int max = L->r[0];
for (int i = 1; i < L->length; i++)
{
if (L->r[i] > max)
max = L->r[i];
}
//开始从个位一直循环到最大数的最高位
int flag = 0;
do {
//创建十个重复使用的桶
int buckets[10][MAXSIZE];
int buckets_size[10];
for (int i = 0; i < 10; i++)
{
buckets_size[i] = 0;
}
//入桶
for (int i = 0; i < L->length; i++)
{
int index = (int)(L->r[i] / pow(10, flag)) % 10;
buckets[index][buckets_size[index]++] = L->r[i];
}
//出桶
int arr_index = 0;
for (int i = 0; i < 10; i++)
{
for (int j = 0; j < buckets_size[i]; j++)
{
L->r[arr_index++] = buckets[i][j];
}
}
flag++;
} while (max /= 10);
}
int main()
{
sqList test = { {50,99,11,52,83,36,77,4,63,28}, 10 };
RadixSort(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
此算法的重点在于确定数值和桶的对应关系,也就是下面这行代码:
int index = (int)(L->r[i] / pow(10, flag)) % 10;
还有外层循环的次数,采用do-while循环,也就是说,至少需要进行一轮排序。
然后就是循环的结束条件while(max /= 10),从而循环次数就是最大数值的位数。
既然基数排序是从个位开始的,我们先来看看个位的排序,也就是第一次入桶和出桶。
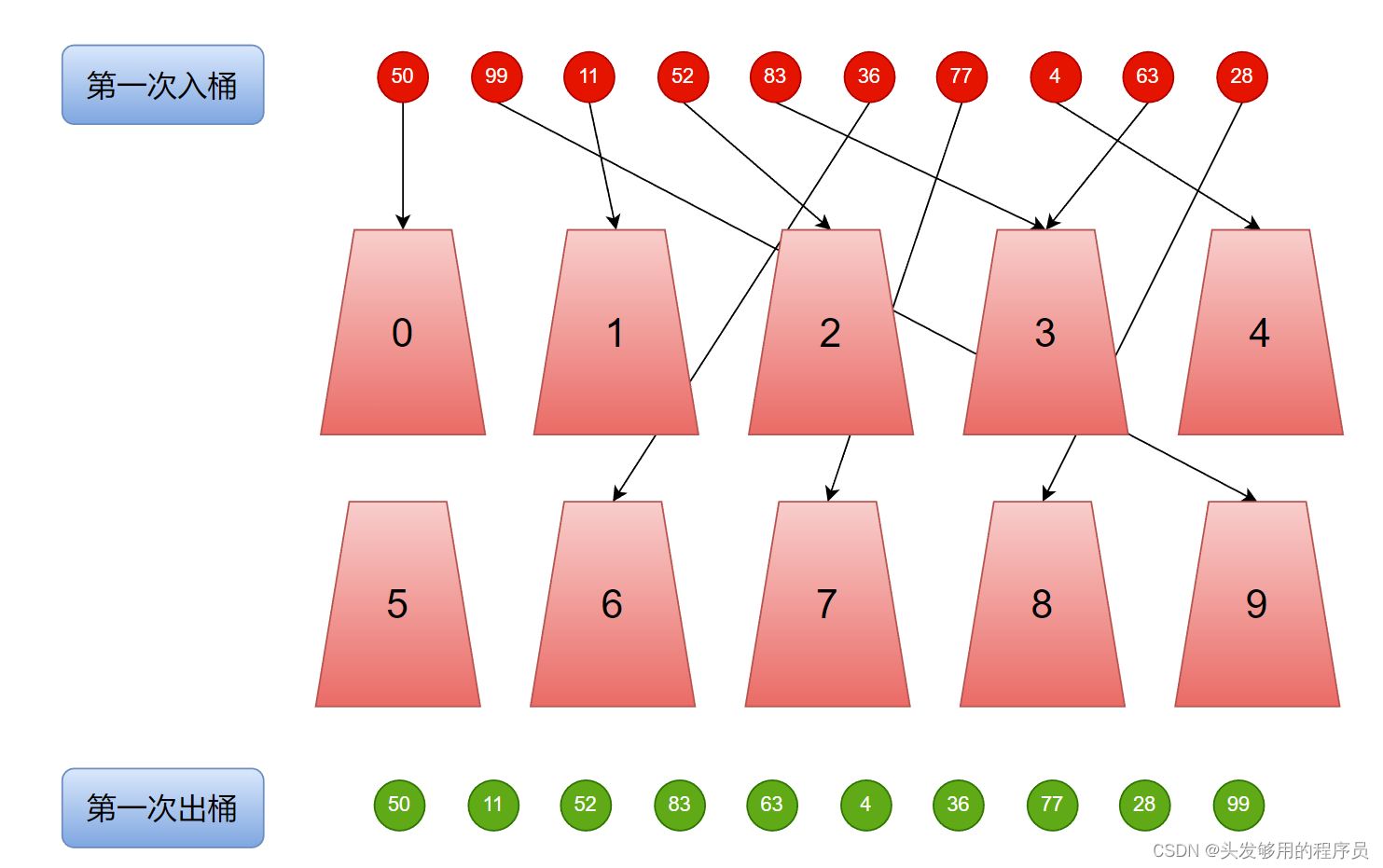
从上图可以看出,第一次入桶,直接根据各个数据的个位数值进行排序,个位数值是几就进几号桶,共有10个桶。
进行完第一轮排序后便到了第二轮排序,让我们看看第二轮排序情况。
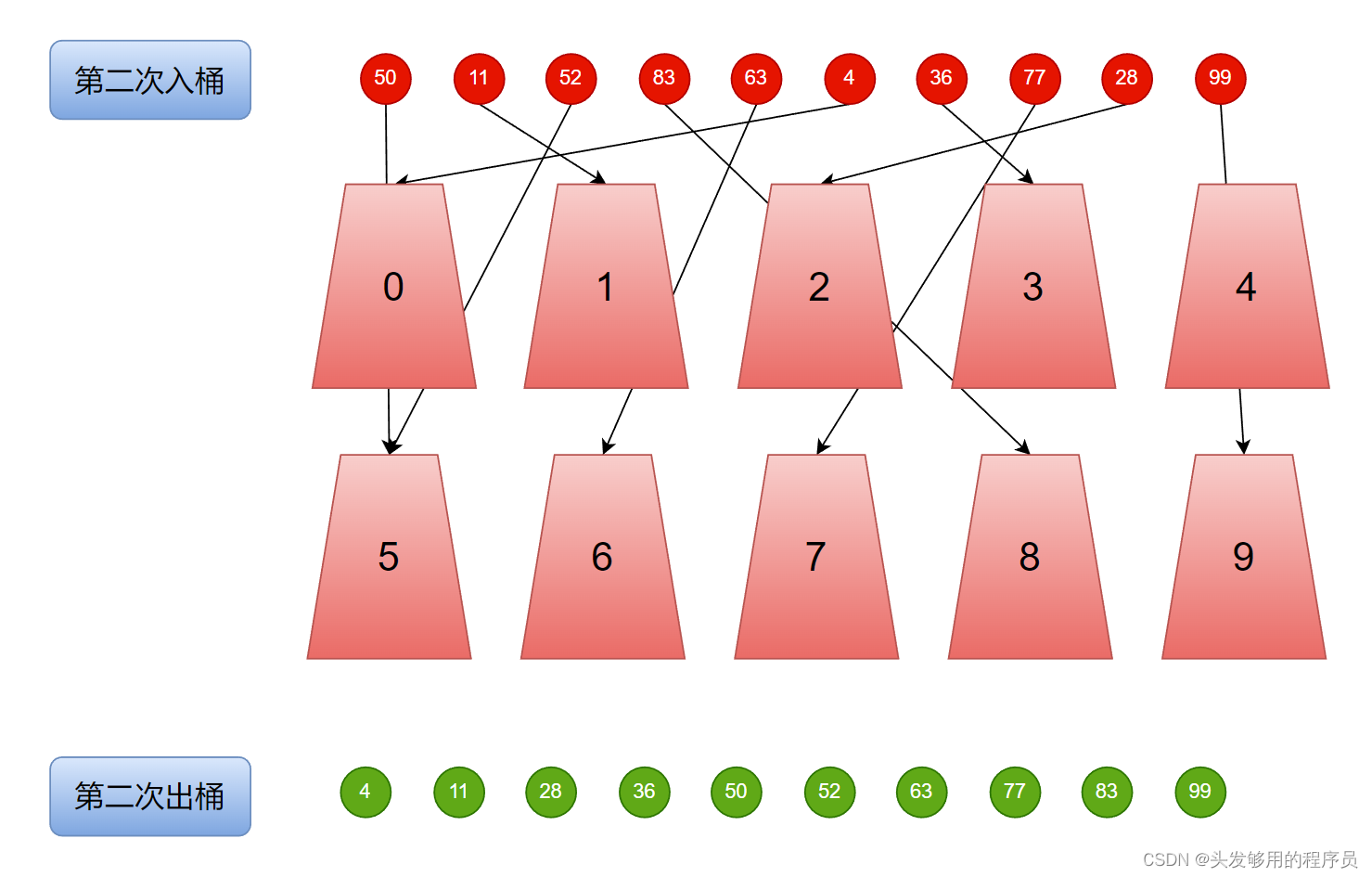
因为最大的数只有两位,因此只需要进行两轮排序即可。从上图可以看出,经过第二轮排序后,整个排序任务已经完成。
9.2 基数排序算法总结
基数排序也是一种比较好理解的排序算法,但需要注意,只能从低位开始比较,若从高位开始比较,到了低位时就会出现错误(很好理解,可以自己试试)。
若本来需要比较的数值是一样的,则不会改变原来的相对顺序,所以基数排序是一种稳定的排序算法。
10 计数排序
计数排序是最好理解的排序算法之一,只需要记录每个数出现的频率,将其放入一个辅助空间中,然后再逐个取出进行排序。
这种排序方法虽然简单直观,也比较高效。但并非所有的情况都适用,该排序算法适用于待排序数据范围比较集中的情况,如果数值范围较大,则需要较大的辅助空间。
10.1 计数排序的代码实现
计数排序的代码实现如下。
#include <stdio.h>
#include <malloc.h>
#include <math.h>
#define MAXSIZE 10000
#define TRUE 1
#define FALSE 0
typedef struct
{
int r[MAXSIZE + 1];
int length;
}sqList;
void swap(sqList* L, int i, int j)
{
int temp = L->r[i];
L->r[i] = L->r[j];
L->r[j] = temp;
}
void CountSort(sqList* L)
{
int max = L->r[0];
int min = L->r[0];
for (int i = 0; i < L->length; i++)
{
if (L->r[i] > max)
max = L->r[i];
if (L->r[i] < min)
min = L->r[i];
}
int len = max - min + 1;
int* arr_temp = (int*)malloc(sizeof(int)*len);
memset(arr_temp, 0, len*sizeof(int));
//将索引全部移位到辅助数组中
for (int i = 0; i < L->length; i++)
arr_temp[L->r[i] - min]++;
int index = 0;
for (int i = 0; i < len; i++)
{
while (arr_temp[i] > 0)
{
arr_temp[i]--;
L->r[index++] = i + min;
}
}
free(arr_temp);
}
int main()
{
sqList test = { {9,1,5,8,3,3,4,6,1,1}, 10};
CountSort(&test);
for (int i = 0; i < test.length; i++)
printf("%d\t", test.r[i]);
return 0;
}
运行的示意图如下:
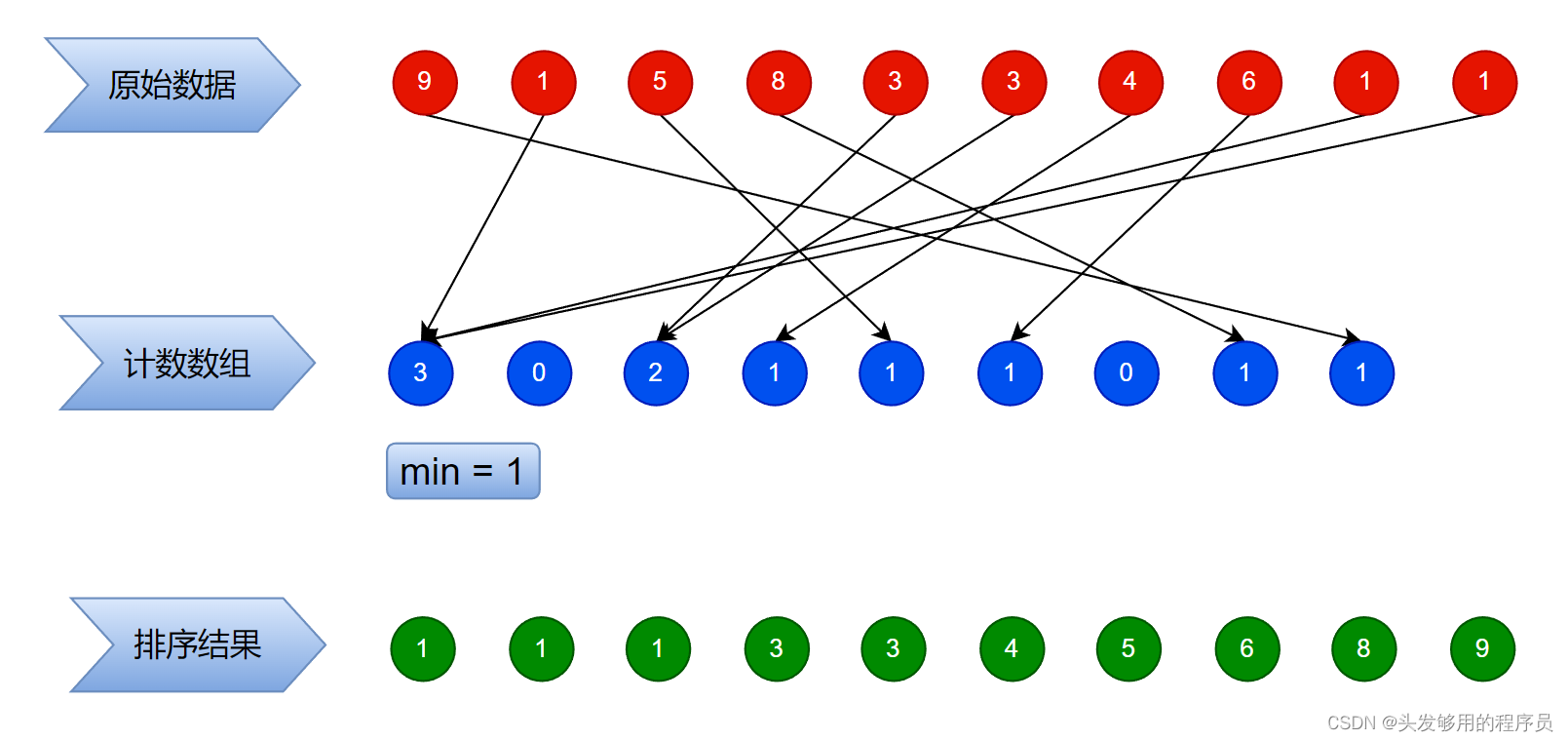
从上图可以看出,运行的原理很简单,就是根据待排序序列的数值分布范围分配内存空间,然后对各个数值进行计数,然后取出即可。
10.2 计数排序算法总结
计数排序简单高效,尤其擅长于范围集中,且数据量大的集合。况且由于保存到辅助空间时相同数值按照先后数据一次存入,所以也是稳定的排序算法。
计数排序和桶排序一样,对待排序序列的具体数值非常敏感,若数值范围较大,则需要很大的内存空间来进行辅助排序。
11 后记
千淘万漉虽辛苦,吹尽狂沙始到金。这应该是工程量最大的一篇文章了,从酝酿到发表用了至少一周时间,而在这过程中,也有很多成长和收获。感谢阅读,愿我们一起成长,一起期待美好的未来!















 9814
9814











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









