







#深度学习# 树梅派3B+(Raspberry 3B+ )安装Raspbian系统 安装Tensorflow 安装Keras 源码方式安装OpenCV踩坑排雷记录(持续更新)
intel NCS & OpenVINO 交流QQ群:608483784
1.准备阶段
1.1 硬件准备
首先 我们需要以下东西:
0.一块树梅派3B+
1.一个内存卡(速度越快越好,博主使用的三星64Gevo U4卡 写入大约30MB/s
2.一台能用的电脑(本文章所用电脑为Windows10系统)
3.显示屏 鼠标 键盘 一个好用的电源(以树梅派不提示欠压为准)
1.2 软件准备
有了硬件之后,我们需要准备以下软件(软件版本可能不同,博主不保证不同版本的可用性)
@Windows平台 需要准备:
1.解压缩软件(推荐:7-Zip)用于解压系统包".xz"文件。
2.Win32DiskImager 用于将".img"磁盘映像文件写入TF卡中。
3.DiskGenius 用于TF卡需要恢复为单分区重新写入系统时。
4.Raspbian系统包
2.系统安装与部署
<注意> 博主不温馨的提示:数据无价,在进行本章节的操作时,请务必留意每步操作是否正确。由于自己疏忽所导致的数据丢失请自行承担痛苦:)
2.1 TF卡分区
无论新旧TF卡,博主都建议使用DiskGenius将TF卡所有分区删除并重新建立分区。以避免不可预料的分区错误问题。
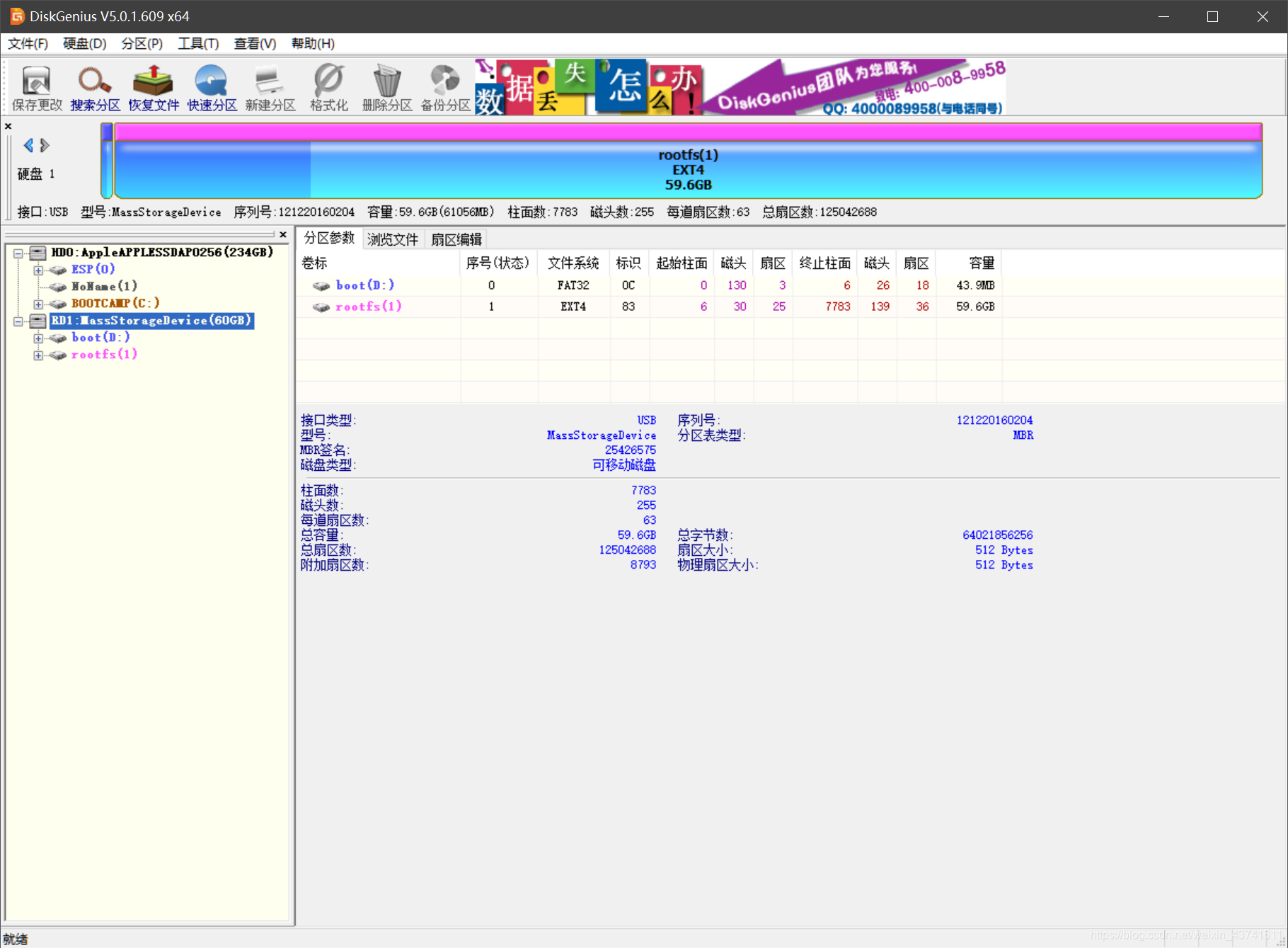



最后,保存分区表,退出。
2.2 TF卡写入系统引导与系统文件
1.将TF卡格式化后,使用7-Zip将下载好的".xz"文件打开,解压缩包内的".img"磁盘映像文件。
2.打开Win32DiskImager,选择".img“磁盘映像文件,选择正确的TF磁盘盘符,点击写入按钮等待数据写入。

3.写入完成后,Windows系统可能会提示需要格式化磁盘,此时务必选择不格式化。因为写入了树梅派系统的TF卡由两个分区组成。第一个分区为Boot引导分区,可被Windows系统识别,而第二个分区为系统运行分区,此分区无法被Windows系统识别,Windows默认会提示用户格式化为Windows可识别分区。如不慎格式化,请从2.1节再来一遍:)
2.3 树梅派系统初始化
将写入了系统文件的TF卡插入树梅派TF卡槽,连接好显示屏,鼠标,键盘(缺少三个外设的操作方法不在本博客中讨论),连接电源,等待树梅派初始化开机。
<注意> 如果显示屏右上角出现黄色闪电图标,说明树梅派当前处于欠压状态,请更换优质电源与优质数据线,直至欠压图标消失。如果在欠压模式下初始化/运行系统,系统很可能会在高负载时断电重启。此情况可能会导致不可预料的系统问题。如果系统黑屏,红色电源灯断续点亮,则系统可能严重欠压导致无法正常初始化硬件,也请更换电源与数据线。
<建议> 博主推荐使用5V 2.4A的充电器作为电源,最好具备线损补偿功能。有关充电器的相关信息,建
议移步至充电头网了解详情。
稍等片刻后,图形界面出现,便可以开始树莓派的配置工作了。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 748
748











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









