







摘要:
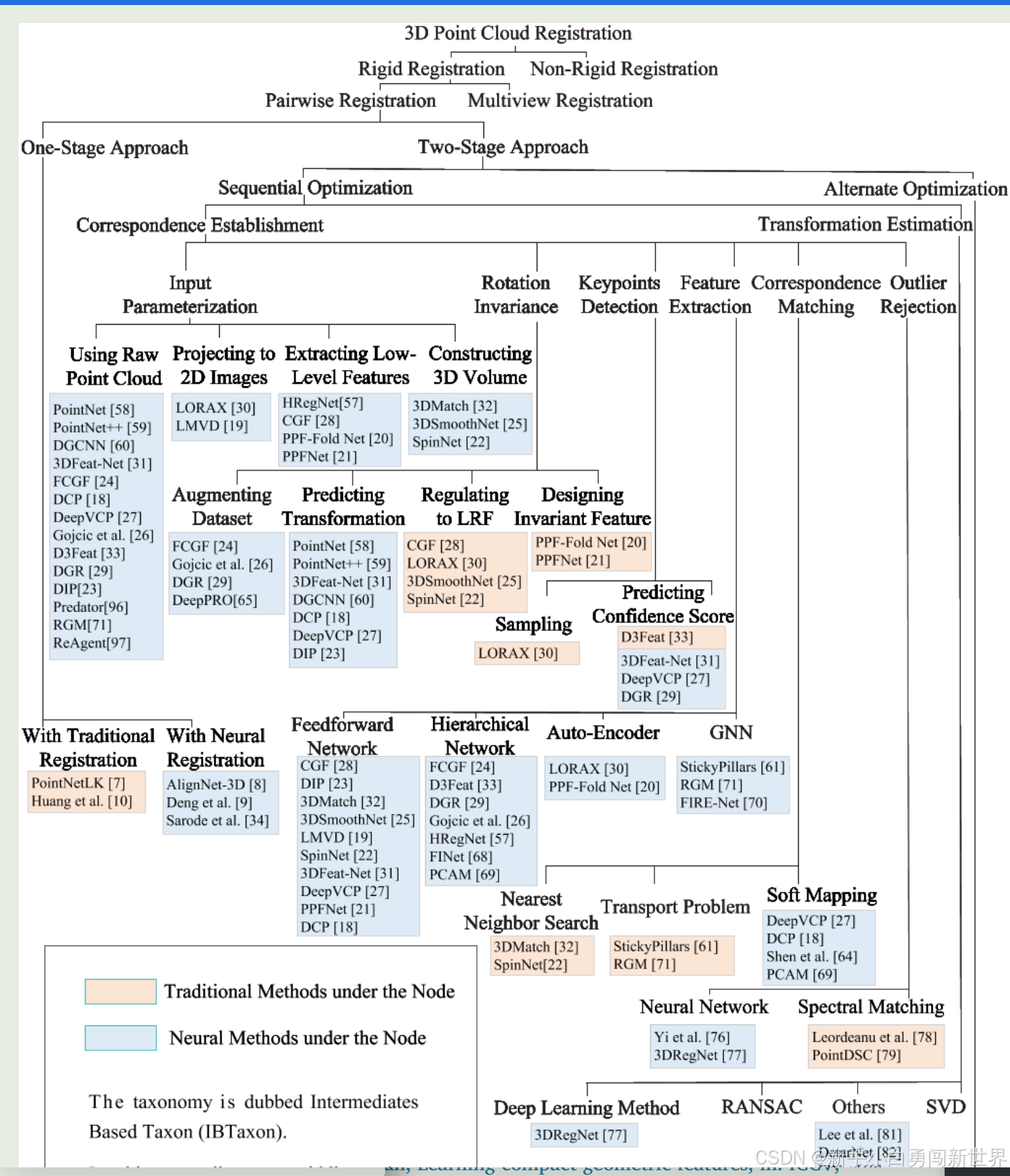
本文提出了一种新的分类法,称为基于中间体的分类单元(ibtaxon),它通过引入的中间变量或利用的中间模块有效地对多种配准方法进行分类。相关数据集和评估指标也被组合并重新组织。讨论可能的开放研究问题和为三维点云配准领域的未来研究提出我们的愿景来结束我们的论文。
主要内容:
与图像配准之间的差异:
首先,三维点云配准可以更准确地获取三维空间中物体的位置和形状。
其次,通过三维点云配准处理局部区域时,可以有效避免周围物体的影响。
第三,三维点云配准具有鲁棒性,能够适应一定程度的物体变形、遮挡和噪声。
主要贡献:
我们提出了一种新的分类法,称为ibtaxon,并对刚性成对三维点云配准的多种方法进行了系统分类。
我们详细深入研究了ibtaxon,并对相关方法进行了综合技术回顾。此外,我们还结合了广泛使用的数据集和指标,用于各种方法的标准评估和比较。
我们总结了目前的研究,并详细讨论了三维点云配准的挑战和开放问题


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









