







DHT11驱动开发
一、开发环境
ITOP4412开发板
linux4.14
二、DHT11基本信息
1、传感器性能说明

2、接口说明

3、电源引脚
DHT11的供电电压为3-5.5V。传感器上电后,要等待1s 以越过不稳定状态在此
期间无需发送任何指令。电源引脚(VDD,GND)之间可增加一个100nF 的电容,用以去
耦滤波。
4、数据格式
一次完整的数据传输为40bit,高位先出。
1、采集数据格式:
8bit湿度整数数据+8bit湿度小数数据
+8bi温度整数数据+8bit温度小数数据
+8bit校验和
小数部分用于以后扩展,现在读出为0, 也就是小数部分是不需要使用的
2、数据校验
数据传送正确时校验和数据等于
“8bit湿度整数数据+8bit湿度小数数据+8bi温度整数数据+8bit温度小数数据”所得结果的末8位。
5、通信过程
用户MCU发送一次开始信号后,DHT11从低功耗模式转换到高速模式,等待主
机开始信号结束后,DHT11发送响应信号,送出40bit的数据,并触发一次信号采集,
用户可选择读取部分数据.从模式下,DHT11接收到开始信号触发一次温湿度采集,
如果没有接收到主机发送开始信号,DHT11不会主动进行温湿度采集.采集数据后
转换到低速模式。

总线空闲状态为高电平,主机把总线拉低等待DHT11响应,主机把总线拉低必
须大于18毫秒,保证DHT11能检测到起始信号。 DHT11接收到主机的开始信号后,
等待主机开始信号结束,然后发送80us低电平响应信号.主机发送开始信号结束
后,延时等待20-40us后, 读取DHT11的响应信号,主机发送开始信号后,可以切换
到输入模式,或者输出高电平均可, 总线由上拉电阻拉高。

总线为低电平,说明DHT11发送响应信号,DHT11发送响应信号后,再把总线拉
高80us,准备发送数据,**每一bit数据都以50us低电平时隙开始,高电平的长短定
了数据位是0还是1.**格式见下面图示.如果读取响应信号为高电平,则DHT11没有
响应,请检查线路是否连接正常.当最后一bit数据传送完毕后,DHT11拉低总线
50us,随后总线由上拉电阻拉高进入空闲状态。
数据’0’

数据’1’

6、电气特性

三、驱动程序
1、DHT11与ITOP4412硬件连接

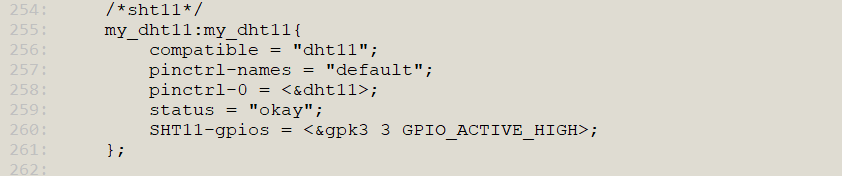
2、设备树
pinctrl子系统中引用DHT11的管脚
exynos4412-pinctrl.dtsi

exynos4412-itop-elite.dts
3、驱动程序
/*************************************************************************
> File Name: DHT11.c
> 作者:YJK
> Mail: 745506980@qq.com
> Created Time: 2021年05月20日 星期四 21时33分51秒
************************************************************************/
#include<linux/init.h>
#include<linux/module.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/cdev.h>
#include <linux/fs.h>
#include <linux/delay.h> //内核延时 忙等
#include <linux/uaccess.h>
#define ERROR_PRINT(x) do{ \
printk(x " is error!\n"); \
return -1; \
}while(0)
#define DEVICE_NAME "dht11"
#define HIGH 1
#define LOW 0
/*1、platform匹配*/
/*2、匹配成功后,注册字符设备或杂项设备*/
int dht11_GPIO; //DHT11_GPIO编号
struct dht11_info {
dev_t devt;
struct cdev cdev;
struct class *dht11_class;
struct device *dht11_device;
};
struct dht11_info dht11;
/*起始信号
主机发送采集信号
主机由高电平-->低电平(至少18ms)--->高电平(20-40us)
DHT响应信号 低电平(80us)--->高电平(80us)
数据开始 低电平(50us)
数据0 高电平 26us-28us
数据1 高电平70us
*/
void end(void)
{
gpio_direction_output(dht11_GPIO, HIGH);
// gpio_set_value(dht11_GPIO, HIGH);
}
/*数据采集*/
unsigned char get_dht11_value(void)
{
int i;
unsigned char data = 0;
for (i = 0; i < 8; i++) //8bit
{
if (gpio_get_value(dht11_GPIO) == LOW)
{
while(gpio_get_value(dht11_GPIO) == LOW); //低电平数据起始
/*当变为高电平时, 等待40us 查看是否为高电平
如果为高电平 则为 1
如果为低电平 则为 0
*/
// printk("LOW END\n");
udelay(30);
if (gpio_get_value(dht11_GPIO) == HIGH) //1
{
data |= (0x1 << (7 - i)); //数据自高位到低位
udelay(40);
}
else
data &= ~(0x1 << (7 - i)); // 置为0
}
else
printk("------------ HIGH");
}
return data;
}
ssize_t dht11_read(struct file *file, char __user * user_buf, size_t size, loff_t * loff)
{
unsigned char dht11_data[5];
printk("start\n");
ssleep(1);
gpio_set_value(dht11_GPIO, LOW);
mdelay(20); //拉低20ms
/*拉高20-40us*/
gpio_set_value(dht11_GPIO, HIGH);
udelay(30); //拉高30us
//设置为输入
gpio_direction_input(dht11_GPIO);
/*DHT11响应信号*/
if (gpio_get_value(dht11_GPIO) == LOW)
{
// printk("xiangying\n");
//80us 低电平
while(gpio_get_value(dht11_GPIO) == LOW);
//80us 高电平
while(gpio_get_value(dht11_GPIO) == HIGH);
dht11_data[0] = get_dht11_value(); //湿度整数数据
dht11_data[1] = get_dht11_value(); //湿度小数数据 0
dht11_data[2] = get_dht11_value(); //温度整数数据
dht11_data[3] = get_dht11_value(); //温度小数数据
dht11_data[4] = get_dht11_value(); //校验和
printk("data end\n");
}
else
printk("start is error!\n");
if (copy_to_user(user_buf, dht11_data, size) != 0)
{
ERROR_PRINT("copy_to_user");
}
printk("copy to user\n");
//恢复为输出模式高电平
end();
return 0;
}
int dht11_open(struct inode * inode, struct file * file)
{
return 0;
}
int dht11_release(struct inode * inode, struct file *file)
{
return 0;
}
struct file_operations fops = {
.open = dht11_open,
.release = dht11_release,
.read = dht11_read,
.owner = THIS_MODULE
};
/*匹配成功进入probe函数*/
int dht11_probe(struct platform_device *pdev)
{
/*匹配成功之后,获取硬件资源,然后注册字符设备*/
/*SHT11-gpios = <&gpk3 0 GPIO_ACTIVE_HIGH>;*/
int ret;
printk("probe\n");
dht11_GPIO = of_get_named_gpio(pdev->dev.of_node, "SHT11-gpios", 0);
if (dht11_GPIO < 0)
{
ERROR_PRINT("of_get_named_gpio");
}
/*获取资源*/
ret = gpio_request(dht11_GPIO, "dht11_gpio");
if (ret != 0)
{
ERROR_PRINT("gpio_request!");
}
ret = gpio_direction_output(dht11_GPIO, HIGH);
if (ret != 0)
{
ERROR_PRINT("gpio_direction_output");
}
/*注册字符设备驱动*/
/*分配设备号*/
ret = alloc_chrdev_region(&dht11.devt, 0, 1, "dht11");
if (ret != 0)
{
ERROR_PRINT("alloc_chrdev_region");
}
/*初始化cdev*/
dht11.cdev.owner = THIS_MODULE;
cdev_init(&dht11.cdev, &fops);
/*将cdev注册到内核*/
ret = cdev_add(&dht11.cdev, dht11.devt,1);
if (ret != 0)
{
ERROR_PRINT("cdev_add");
}
/*创建设备class*/
dht11.dht11_class = class_create(THIS_MODULE, "dht11_class");
if (dht11.dht11_class == NULL)
{
ERROR_PRINT("class_create");
}
/*在class下创建设备节点*/
dht11.dht11_device = device_create(dht11.dht11_class, NULL, dht11.devt, NULL, DEVICE_NAME);
if (dht11.dht11_device == NULL)
{
ERROR_PRINT("device_create");
}
printk("probe success!\n");
return 0;
}
int dht11_remove(struct platform_device *pdev)
{
return 0;
}
struct of_device_id of_match_table[] = {
{.compatible = "dht11"},
{}
}; //设备树匹配
struct platform_driver pdrv = {
.probe = dht11_probe,
.remove = dht11_remove,
.driver = {
.name = "dht11",
.owner = THIS_MODULE,
.of_match_table = of_match_table
},
};
static int dht11_init(void)
{
//注册platform_driver
int ret = platform_driver_register(&pdrv);
if (ret != 0)
ERROR_PRINT("platform driver register");
return 0;
}
static void dht11_exit(void)
{
/*注销设备节点*/
device_destroy(dht11.dht11_class, dht11.devt);
/*注销class*/
class_destroy(dht11.dht11_class);
/*注销字符设备*/
cdev_del(&dht11.cdev);
/*注销设备号*/
unregister_chrdev_region(dht11.devt, 1);
/*注销GPIO*/
gpio_free(dht11_GPIO);
/*注销设备节点*/
/*注销platform_driver*/
platform_driver_unregister(&pdrv);
printk("bye bye\n");
}
module_init(dht11_init);
module_exit(dht11_exit);
MODULE_LICENSE("GPL");
4、应用程序
/*************************************************************************
> File Name: app_dht11.c
> 作者:YJK
> Mail: 745506980@qq.com
> Created Time: 2021年05月21日 星期五 12时29分13秒
************************************************************************/
#include<stdio.h>
#include <fcntl.h>
#include <unistd.h>
int main(int argc,char *argv[])
{
unsigned char buf[5] = {0};
int fd = open("/dev/dht11", O_RDWR);
if (fd == -1)
{
perror("open");
return -1;
}
printf("open success!\n");
while(1)
{
int ret = read(fd, buf, 5);
if (ret == -1)
{
perror("read");
return -1;
}
/*校验和*/
int crc = buf[0] + buf[1] + buf[2] + buf[3];
int i = 0;
if (crc & 0xFF == buf[4])
{
printf("humidity %d% \n", buf[0]);
printf("temperatuere %dC\n", buf[2]);
}
sleep(2);
}
close(fd);
return 0;
}

OVER!
DHT11 这个传感器相对来说还是比较简单的,模拟时序即可
1、主机发送起始信号 高电平---->低电平(至少18ms)----->高电平(20-40us)
2、DHT11应答 DHT11 高电平---->低电平(80us)------->高电平(80us)
3、数据传输 开始数据传输信号 高电平----->(1Bit起始)低电平(50us) ---->高电平(26us-28us数据0 (70us 数据1))
数据传输完毕 DHT11 拉低总线50us 然后主机将总线拉高















 1823
1823











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









