






1.加速度和陀螺仪的偏移计算
MPU6050每次上电以目前的角度为0度基准,在做平衡车的时候测出的角度都是相对的角度。(通常只对x,y轴做偏移计算)
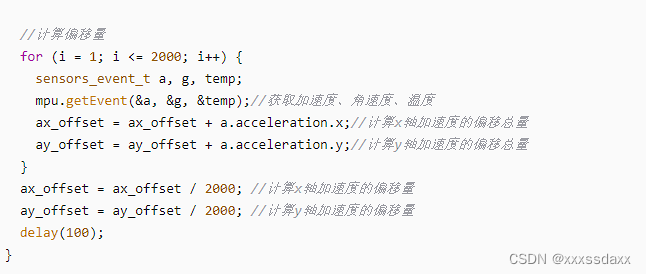
采集mpu6050静止时的数据。
2.采用旋转矩阵计算欧拉角
2.1 通过加速度计计算欧拉角(注意,由于绕Z旋转时,感受到的重力加速度是不变的,因此加速度计无法计算yaw角)
roll 和 Pitch 计算公式 (注意 pitch角计算公式是否加负号取决于传感器)
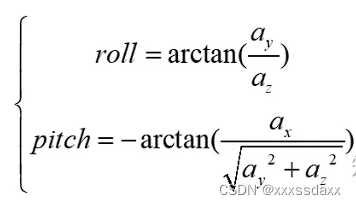
具体算式求导过程在知乎上有,下面给出链接
个人的理解:用加速度计求欧拉角 简单来看就是 起始点(0,0,g)到终点(ax,ay,az)经过绕ZYX轴来求出欧拉角roll ,pitch。其中起点和终点的加速度都是已知的
2.2 通过陀螺仪来计算欧拉角(只有在角度非常小的时候,角速度的积分才会等于欧拉角)
陀螺仪测量的绕3个轴转动的角速度,因此,对角速度积分,可以得到角度。
1> 设n+1时刻的姿态角为r+Δr、p+Δp、y+Δy,该姿态也是经历了3次旋转。要想计算n+1时刻的姿态,只要在n时刻姿态的基础上,加上对应的姿态角度变化量即可
依次绕ZYX轴旋转
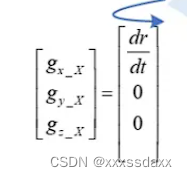
首先绕Z轴转动产生的角速度可以用 Wz = dy/dt (dy表示某一时刻的yaw)来表示,那么此时就产生了一个点{Wx_z Wy_z Wz_z} = {0 , 0 ,Wz};此时才第一次绕轴转动(绕Z轴),那么再绕Y 和 X轴转动时就可以理解为这个点绕Y轴和X轴转动
那么绕ZYX轴转动完后 绕Z轴的yaw角的角速度:
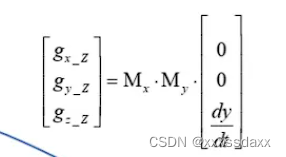
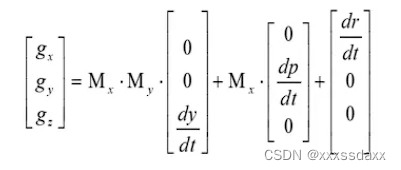
其中Mx和My 依次向左乘

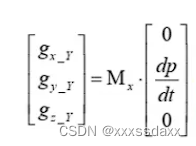
同理
绕Y轴产生pitch角的角速度
绕Z轴长roll角的角速度
最终可得到
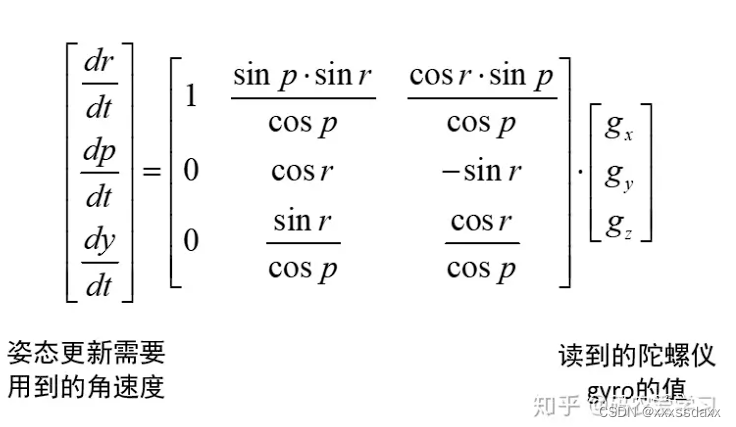
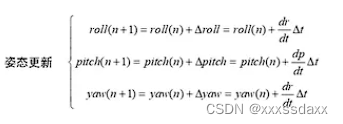
最后可以求出yaw角度:
yaw(n+1) = yaw(n) + ▲yaw = yaw(n) + (dy/dt)▲t
dy/dt = (sinr/cosp)*Gy + (cosr/cosp)*Gz
注意根据这个算式求出的偏航角完全不能够使用,数据会在很短的时间内越积越大(不知道是不是我这个算式错误,yaw的结果只会越来越大)
▲t可以理解为陀螺仪的采样频率 (个人理解)。
一阶互补滤波
float FOCF(float acc_m,float gyro_m,float* last_angle){
float temp_angle;
temp_angle=Ka*acc_m+(1-Ka)*(*last_angle+gyro_m*dt);
*last_angle=temp_angle;
return temp_angle;
}
Parm : acc_m : 根据加速度求出的roll/Pitch角度 gyro_m:根据陀螺仪读取对应轴的角速度(因为我这个陀螺仪pitch是按y轴旋转的) last_angle:上一次的roll/Pitch 一阶滤波后的角度
roll_FOC = FOCF(roll_Acc, Gyro_y , &roll_FOC_Last);
pitch_FOC = FOCF(pitch_Acc , Gyro_x , &pitch_FOC_Last);
ka是加速度权重占比
dt的取值为滤波器采样时间(https://www.cnblogs.com/LJWJL/p/7858262.html)
测试结果
 差异不大
差异不大
更改权重占比 :当处于静止状态 减少为0.1,此时pitch角经过一阶滤波后的数值偏小,但经过短暂的累积 会与未经过滤波的数值越来越接近
二阶互补滤波
float SecondOrder(float newAngle, float newRate, float Dtime)
{
x1=(newAngle-SecondOrder_angle)*(1-K2)*(1-K2);
y1=y1+x1*Dtime;
x2=y1+2*(1-K2)*(newAngle-SecondOrder_angle)+newRate;
SecondOrder_angle=SecondOrder_angle+ x2*Dtime;
return SecondOrder_angle;
}
求出的角度相差甚远
还有很多问待解决














 4548
4548











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









