







 本文介绍了一种使用V-REP平台实现机器人逆运动学的方法。通过代码演示了如何创建机器人末端执行器的位置目标,并利用IK插件计算关节角度以达到预定位置。此外,还展示了如何设置IK环境和IK组,以及如何验证找到的解决方案。
本文介绍了一种使用V-REP平台实现机器人逆运动学的方法。通过代码演示了如何创建机器人末端执行器的位置目标,并利用IK插件计算关节角度以达到预定位置。此外,还展示了如何设置IK环境和IK组,以及如何验证找到的解决方案。
V-rep 逆运动学(IK)8-computingJointAnglesForRandomPoses 代码自学
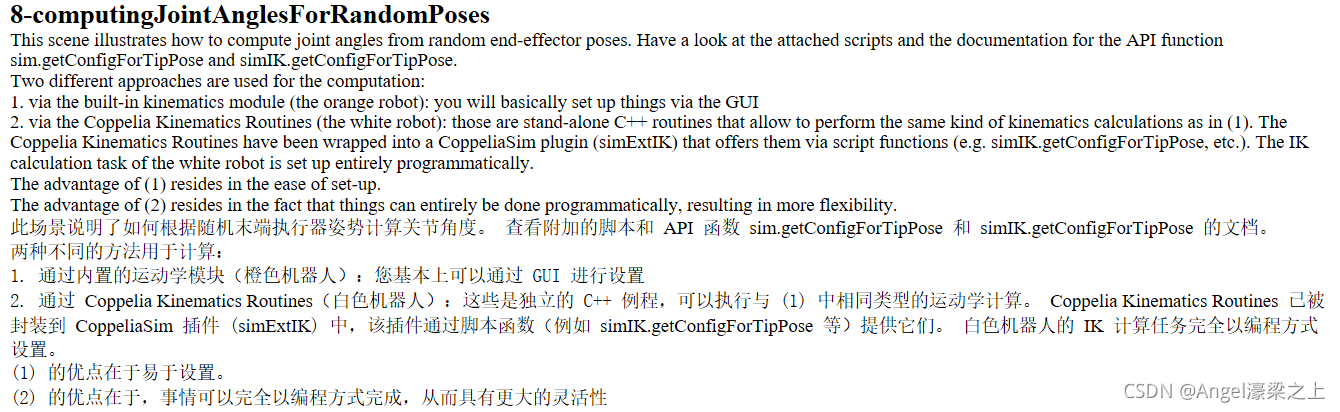
白色机器人(即通过封装好的simExtIK插件进行逆运动学计算)的代码
代码功能:用代码实现dummy的创建、ik组和元素的创建及参数设置
(//注释部分的代码不能放在vrep里直接运行,这里只做解释使用)
function sysCall_init()
//一共六个关节,通过句柄获得
//这里的IRB4600_joint1、……、IRB4600_joint6与场景层次结构里的名称一一对应
//把这些句柄分别赋给simJointHandles[1]……simJointHandles[6]
simJointHandles={}
for i=1,6,1 do
simJointHandles[i]=sim.getObjectHandle('IRB4600_joint'..i)
end
//机器人末端的Dummy赋给simTip,机器人的基座赋给simBase
simTip=sim.getObjectHandle('IRB4600_IkTip')
simBase=sim.getObjectHandle('IRB4600')
//规划的机器人末端目标位置一共有四个Dummy,分别是testTarget1……testTarget4
//把这些末端位置句柄分别赋给target[1]…target[4]
targets={sim.getObjectHandle('testTarget1'),sim.getObjectHandle('testTarget2'),sim.getObjectHandle('testTarget3'),sim.getObjectHandle('testTarget4')}
//机器人的目标位置,初始化为0,cnt1在0-3之间循环
cnt1=0
cnt2=0
//
//现在基于机器人的运动学在IK插件环境中建立一个运动学链和2个IK组(无阻尼和阻尼)
ikJointHandles={}
//创建一个IK环境ikEnv
ikEnv=simIK.createEnvironment()
//在IK环境中创建一个Dummy,命名为ikBase
local ikBase=simIK.createDummy(ikEnv)
//把ikBase设置成与CoppeliaSim中的simBase对应的相同姿势
simIK.setObjectMatrix(ikEnv,ikBase,-1,sim.getObjectMatrix(simBase,-1))
//建立父基座的Dummy,当前与ikBase相同
local parent=ikBase
//循环所有simJointHandles关节,simJointHandles[1]-simJointHandles[6]
for i=1,#simJointHandles,1 do
//在IK环境中创建一个旋转关节ikJointHandles[i]
ikJointHandles[i]=simIK.createJoint(ikEnv,simIK.jointtype_revolute)
//把该关节ikJointHandles[i]设置成IK模式
simIK.setJointMode(ikEnv,ikJointHandles[i],simIK.jointmode_ik)
//获得关节simJointHandles[i]的关节限制
local cyclic,interv=sim.getJointInterval(simJointHandles[i])
//为ikJointHandles[i]设置上述获得的与关节simJointHandles[i]相同的关节限制
simIK.setJointInterval(ikEnv,ikJointHandles[i],cyclic,interv)
//为ikJointHandles[i]设置与关节simJointHandles[i]相同的关节位置
simIK.setJointPosition(ikEnv,ikJointHandles[i],sim.getJointPosition(simJointHandles[i]))
//为ikJointHandles[i]设置与关节simJointHandles[i]相同的关节姿态
simIK.setObjectMatrix(ikEnv,ikJointHandles[i],-1,sim.getObjectMatrix(simJointHandles[i],-1))
//设置相应的父元素(第一个关节的父节点为基座)
simIK.setObjectParent(ikEnv,ikJointHandles[i],parent,true)
//更新相应的父元素(第二个关节的父节点为第一个关节)
parent=ikJointHandles[i]
end
//在IK环境中创建末端tip Dummy,命名为ikTip
ikTip=simIK.createDummy(ikEnv)
//把ikTip设置成与CoppeliaSim中的simTip对应的相同姿势
simIK.setObjectMatrix(ikEnv,ikTip,-1,sim.getObjectMatrix(simTip,-1))
//把ikTip连接到运动链的parent上,此时parent为ikJointHandles[6]
simIK.setObjectParent(ikEnv,ikTip,parent,true)
//在IK环境中创建目标Dummy,命名为ikTarget
ikTarget=simIK.createDummy(ikEnv)
//将ikTarget设置成与CoppeliaSim中的simTip对应的相同姿势
simIK.setObjectMatrix(ikEnv,ikTarget,-1,sim.getObjectMatrix(simTip,-1))
//连接两个Dummy,ikTip和ikTarget
simIK.setLinkedDummy(ikEnv,ikTip,ikTarget)
//创建一个IK组,命名为ikGroup
ikGroup=simIK.createIkGroup(ikEnv)
//把ikGroup的分辨率(计算方法)设置为undamped,即对应于界面设置中的Pseudo inverse,参数0为Damping的值,参数3为maxIterations的值
simIK.setIkGroupCalculation(ikEnv,ikGroup,simIK.method_pseudo_inverse,0,3)
//向ikGroup中添加一个IK元素---ikTip
local ikElementHandle=simIK.addIkElement(ikEnv,ikGroup,ikTip)
//指定IK元素ikTip的基座为ikBase
simIK.setIkElementBase(ikEnv,ikGroup,ikElementHandle,ikBase)
//指定IK元素ikTip的约束条件
//其中,最后一项值是约束条件
//simIK.constraint_x, simIK.constraint_y, simIK.constraint_z, simIK.constraint_alpha_beta, simIK.constraint_gamma
//其中,simIK.constraint_gamma只能在simIK.constraint_alpha_beta设置时设置
//为了方便起见,还有
//simIK.constraint_position=simIK.constraint_x|simIK.constraint_y|simIK.constraint_z
//simIK.constraint_orientation=simIK.constraint_alpha_beta|simIK.constraint_gamma
//simIK.constraint_pose=simIK.constraint_position|simIK.constraint_orientation.
simIK.setIkElementConstraints(ikEnv,ikGroup,ikElementHandle,simIK.constraint_pose)
//设置IK元素ikTip所需的精度,最后一项第一个值是linear精度,第二个值是angular精度
simIK.setIkElementPrecision(ikEnv,ikGroup,ikElementHandle,{0.00005,0.1*math.pi/180})
end
//函数applyJoints,将joints的每个值设置为jointHandles的关节位置
applyJoints=function(jointHandles,joints)
for i=1,#jointHandles,1 do
sim.setJointPosition(jointHandles[i],joints[i])
end
end
//在这里你可以检查碰撞和其他测试。如果配置有效,返回true
function configurationValidationCallback(config)
sim.addLog(sim.verbosity_scriptinfos,"Hello from validation callback")
return true
end
function sysCall_actuation()
//定义当前的目标dummyHandle为targets[cnt1+1]
local dummyHandle=targets[cnt1+1]
//获得dummyHandle的姿态m
local m=sim.getObjectMatrix(dummyHandle,-1)
//设置ikTarget的姿态为m
simIK.setObjectMatrix(ikEnv,ikTarget,-1,m)
//搜索一个姿态配置,最大100毫秒
local startTime=sim.getSystemTimeInMs(-1)
while sim.getSystemTimeInMs(startTime)<100 do
local validationCB=''
//如果你需要对找到的配置执行额外的检查,请取消下面的注释:
--local validationCB='configurationValidationCallback@IRB4600'
//搜索与目标Dummy位置/方向在空间中匹配的manipulator配置。 搜索是随机的。如果manipulator的某些旋转关节的范围超过360度,则应为每个返回的配置调用 simIK.getAlternateConfigs,以便生成一些等效的姿势但替代配置。 IK 环境保持不变。
//0.65:一个距离,指示何时计算IK,以便尝试将尖端对准目标
//10000:函数返回时间的上限,以秒为单位。
//{1,1,1,0.1}:一个表的4个值表明一个度量用来计算姿势距离:distance=sqrt((dx*metric[1])^2+(dy*metric[2])^2+(dz*metric[3])^2+(angle*metric[4])^2)
local state=simIK.getConfigForTipPose(ikEnv,ikGroup,ikJointHandles,0.65,10000,{1,1,1,0.1},validationCB)
if state then
applyJoints(simJointHandles,state)
break
end
end
cnt2=cnt2+1
if cnt2>20 then
cnt2=0
cnt1=cnt1+1
if cnt1>3 then
cnt1=0
end
end
end
function sysCall_cleanup()
simIK.eraseEnvironment(ikEnv)
end


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









