







 该博客介绍了机器人正运动学中的DH参数表示法,通过参考视频和文章帮助理解DH坐标系与参数的定义。内容聚焦于DH表示法的四个关键参数在坐标系中的意义,适合机器人操作臂运动学初学者。
该博客介绍了机器人正运动学中的DH参数表示法,通过参考视频和文章帮助理解DH坐标系与参数的定义。内容聚焦于DH表示法的四个关键参数在坐标系中的意义,适合机器人操作臂运动学初学者。
参考视频(用于理解DH的坐标系):
两分钟学习:四足机器人DH参数法
空间机器人技术-动力学与控制-DH坐标系与DH参数
参考文章:
机器人操作臂运动学入门一–D-H参数标定
关键要理解DH表示法中的4个参数的意义:
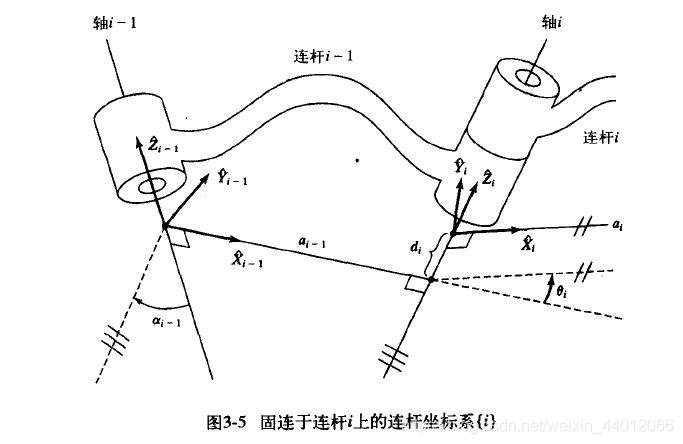
当按照上述的要求定义好坐标系之后,四个连杆参数可以有在坐标系中的描述:
ai = 沿着Xi 轴从Zi 移动到Zi+1的距离
αi = 绕着Xi轴从Zi转到Zi+1的角度
di = 沿着Zi轴从Xi-1到Xi的距离
θi = 绕着Zi轴从Xi-1到Xi的角度。
参考视频(用于理解DH的坐标系):
两分钟学习:四足机器人DH参数法
空间机器人技术-动力学与控制-DH坐标系与DH参数
参考文章:
机器人操作臂运动学入门一–D-H参数标定
关键要理解DH表示法中的4个参数的意义:
当按照上述的要求定义好坐标系之后,四个连杆参数可以有在坐标系中的描述:
ai = 沿着Xi 轴从Zi 移动到Zi+1的距离
αi = 绕着Xi轴从Zi转到Zi+1的角度
di = 沿着Zi轴从Xi-1到Xi的距离
θi = 绕着Zi轴从Xi-1到Xi的角度。

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























