







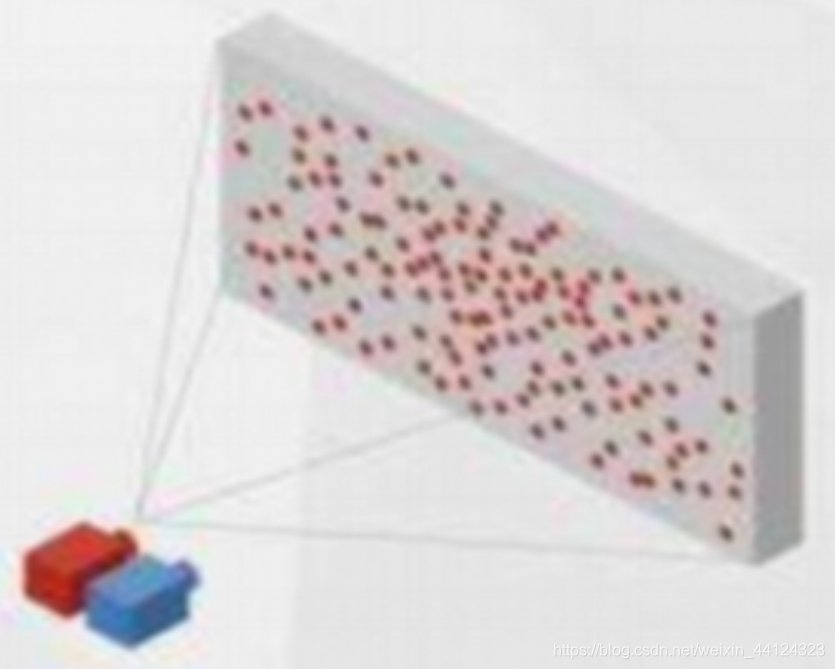
结构光摄像头 (激光散斑投射,红外相机接收)
是3D视觉技术中的其中一种,用于获取物体平面与深度数据。
这项技术的原理:
通过近红外激光器,将具有一定结构特征的光线投射到被拍摄物体上,
再由专门的红外摄像头进行采集,
交给ASIC处理芯片,
最后根据物体造成光信号的变化计算物体位置和深度信息。
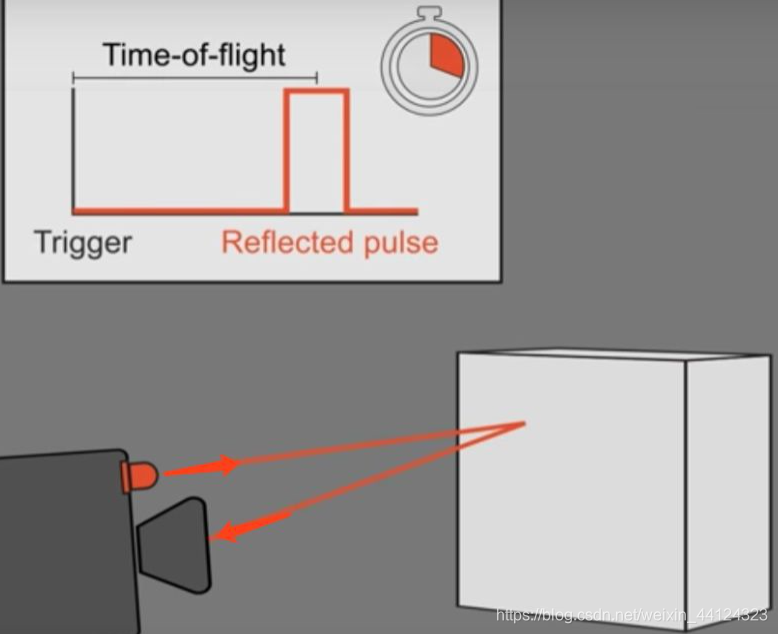
ToF摄像头
TOF时间飞行法的原理是通过专用传感器,捕捉近红外光从发射到接收的飞行时间,判断并计算出物体的距离信息。
原理:https://hal.inria.fr/hal-00725654/PDF/TOF.pdf
https://www.ti.com/lit/wp/sloa190b/sloa190b.pdf
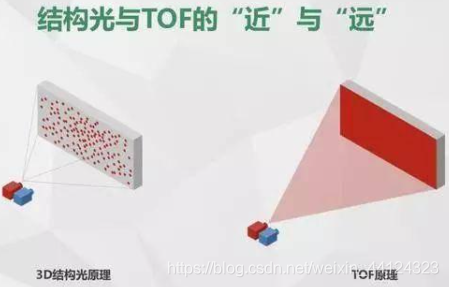
structured-light vs ToF camera 优缺点和应用场景
| 结构光 摄像头 | ToF摄像头 | |
| 测量精度 | 3D结构光技术测量精度高,可以达到1mm(毫米级) | 低 |
| 测量距离 | 近 | 远 |
| 图像分辨率 | 高 | 低 |
| 实时性 | 低 | 高 |
| 算法复杂度 | 高 | 低 |
| 功耗 | 低 | 高 |
| 应用场景 | 人脸识别 | AR |
实际案例
第一代微软Kinect,使用结构光摄像头
第二代微软Kinect,使用ToF摄像头


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









