









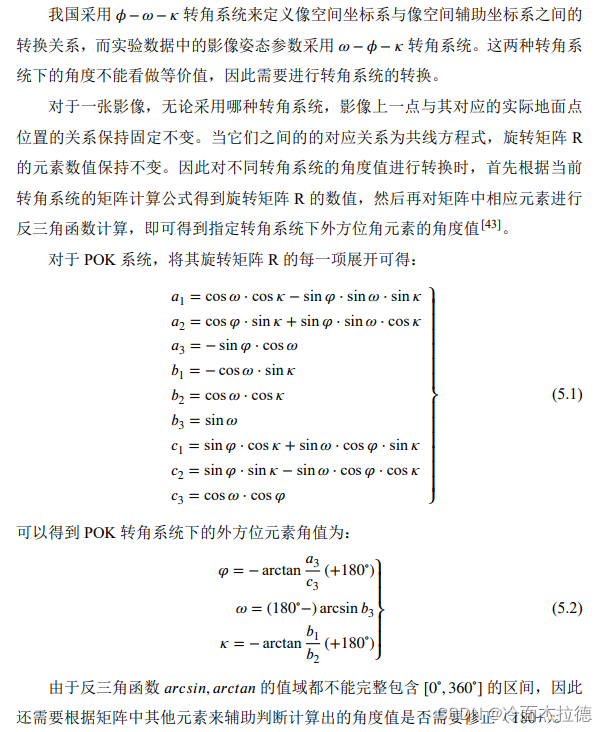
摄影测量转角系统OPK转换至POK下
最近学习了一种新的角度单位,gon
gon 定义. Gon,百分度制 (GRAD)角度单位,用G表示。. 1G = 直角的1%。.
因为做实验用的数据是这个角度单位,但是咱们一般都是用弧度制rad,所以要先进行角度单位的转换。
转角系统
代码
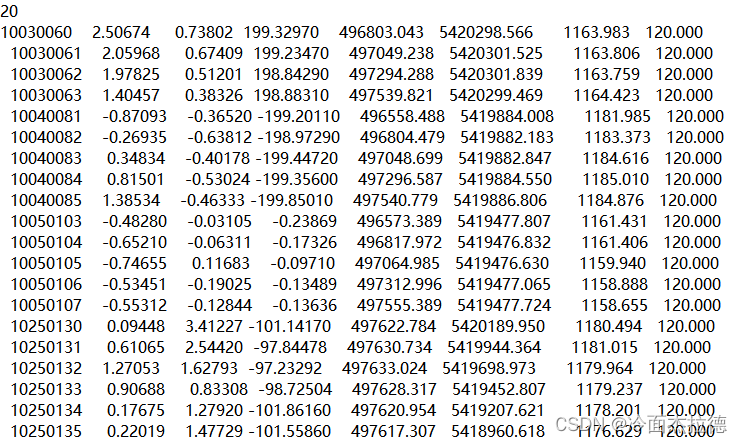
输入的pos文件如下
第一行是数据量
第二行分别是:
序号 w(gon) p(gon) k(gon) X Y Z (120忘了是啥了,不重要)
#include<stdio.h>
#include<iostream>
#include<fstream>
using namespace std;
#define SPGT_PI 3.1415926535897932384626433832795 /* PAI */
#define PI_3 1.0471975511965977461542144610932
#define SPGT_R2D (180.0/SPGT_PI) // 57.295779513082320876798154814105
#define SPGT_D2R (SPGT_PI/180.0) // 0.01745329251994329576923690768489
typedef struct imgInfo {
long index;
double w;
double p;
double k;
double X;
double Y;
double Z;
}imgIn;
static inline double* OnPK2M(double o, double p, double k, double* r)
{
double cosp = cos(p); double cosw = cos(o); double cosk = cos(k);
double sinp = sin(p); double sinw = sin(o); double sink = sin(k);
r[0] = cosp * cosk;
r[1] = -sink * cosp;
r[2] = -sinp;
r[3] = -sinw * sinp * cosk + cosw * sink;
r[4] = sinw * sinp * sink + cosw * cosk;
r[5] = -sinw * cosp;
r[6] = cosw * sinp * cosk + sinw * sink;
r[7] = -sink * cosw * sinp + sinw * cosk;
r[8] = cosw * cosp;
return r;
}
inline double* OPK2M(double o, double p, double k, double* r)
{ return OnPK2M(o, -p, k, r); }
inline void M2nPOK(double* r, double* p, double* o, double* k) {
*o = asin(-r[5]); // r[5] = -sinw;
*p = atan2(-r[2], r[8]); // r[2] = -sinp*cosw; r[8] = cosp*cosw;
*k = atan2(r[3], r[4]); // r[3] = cosw*sink; r[4] = cosw*cosk;
}
int main() {
ifstream fp("F:\\experiment\\Images\\pos.txt");
int imgNum;
float f;
fp >> imgNum;
imgIn* pos = new imgIn[imgNum];
for (int i = 0; i < imgNum; i++) {
fp >> pos[i].index >> pos[i].w >> pos[i].p >> pos[i].k >> pos[i].X >> pos[i].Y >> pos[i].Z >> f;
//单位转变(gon->rad)
pos[i].p = pos[i].p * 0.9 * SPGT_D2R;
pos[i].w = pos[i].w * 0.9 * SPGT_D2R;
pos[i].k = pos[i].k * 0.9 * SPGT_D2R;
}
fp.close();
//转角系统opk->pok
double M_1[9];
for (int i = 0; i < imgNum; i++) {
OPK2M(pos[i].w, pos[i].p, pos[i].k, M_1);
M2nPOK(M_1, &pos[i].p, &pos[i].w, &pos[i].k);
}
ofstream outf("pos.txt");
outf.setf(ios::fixed);
outf.precision(5);
for (int i = 0; i < imgNum; i++) {
outf << pos[i].index << " " << pos[i].p << " " << pos[i].w << " " << pos[i].k << " " << pos[i].X << " " << pos[i].Y << " " << pos[i].Z<<endl;
}
outf.close();
delete[] pos;
return 0;
}
最后输出
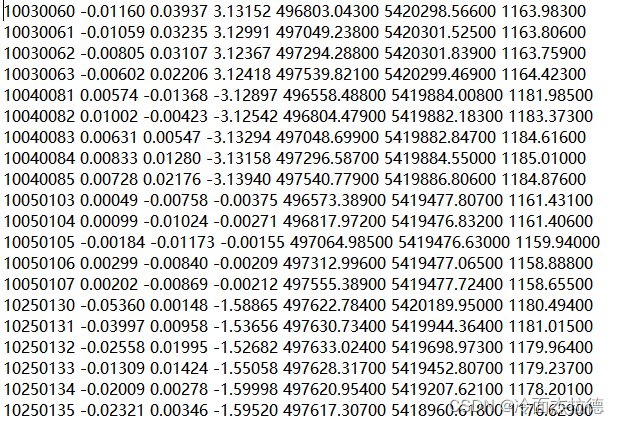
最后输出即为pok坐标系下的坐标。

















 2207
2207

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









