







X4的配线图相关实现原理
一、数字量输出回路
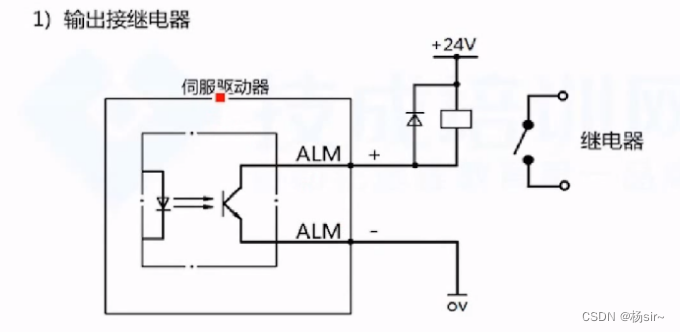
1.输出接继电器
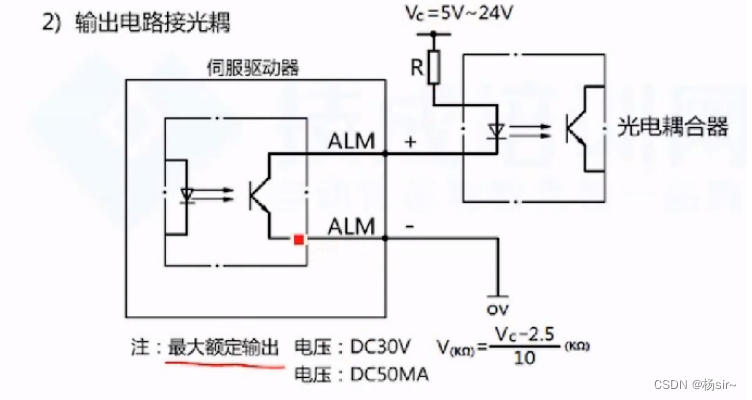
2.输出接光电耦合器
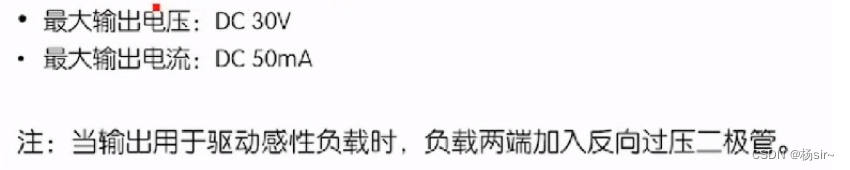
3.A5系列驱动器输出电路规格
4.A5系列驱动器输出端子对照表(位置控制方式)
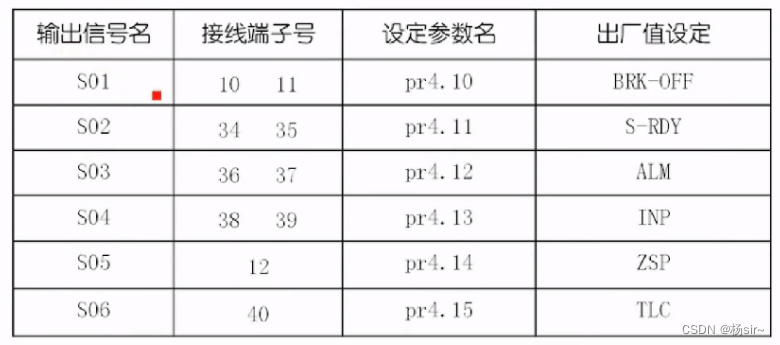
在电路设计中,并没有设计该部分的外围电路,个人分析,在控制中,可以通过编码器去读取相关参数的值,没必要设定外围电路去控制。
二、模拟量输入电路
1.模拟量输入电路
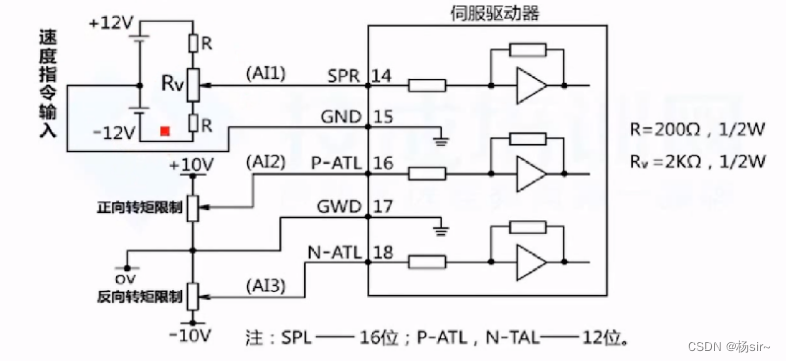
通过模拟量输入的方式去控制电机转动的速度、正向扭矩限制和反向扭矩限制,在视频中的后续内容中介绍了通过模拟量的方式去控制了电机的转动。
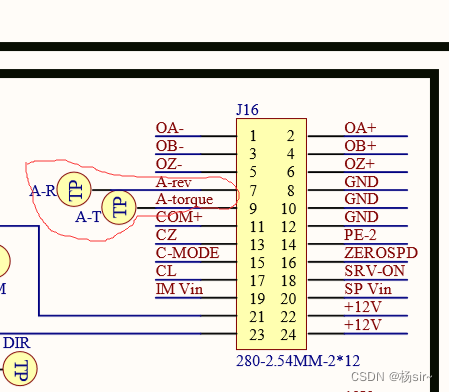
在项目中,感觉使用了正向扭矩限制和反向扭矩限制这两个模拟量输入功能,通过单片机的两个DAC去控制,主要的作用应该就是电机可以转动到的最大位置,包括正转和反转的两个方向如下图:
模拟量输入信号经A/D转换器转换为数字量,其分辨率:
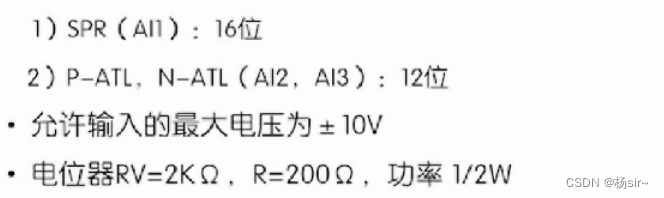
观察整个X4配线图,可以知道正负方向最大范围限制有两个途径,第一个就是通过数字量输入的8、9引脚,第二个就是通过模拟量信号输入的16、17、18引脚,速度控制的话,感觉在项目中一般不会用模拟量输入的方式去控制,因为滑动变阻器的转动是不可控的。
三、位置指令输入电路
1.集电极开路指令脉冲输入方式一------低速
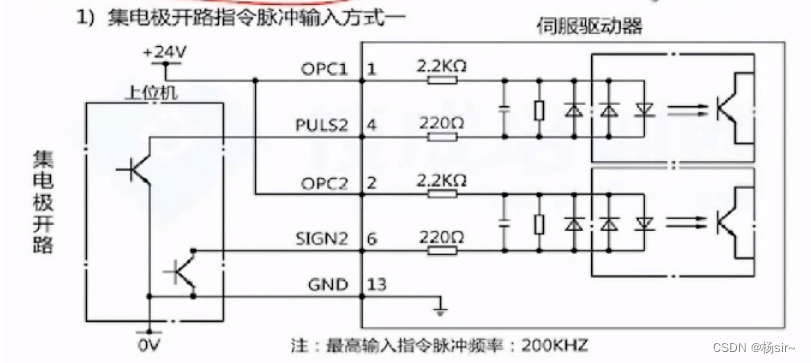
可以看到是一个源型的设计方案
2.集电极开路指令脉冲输入方式二------低速
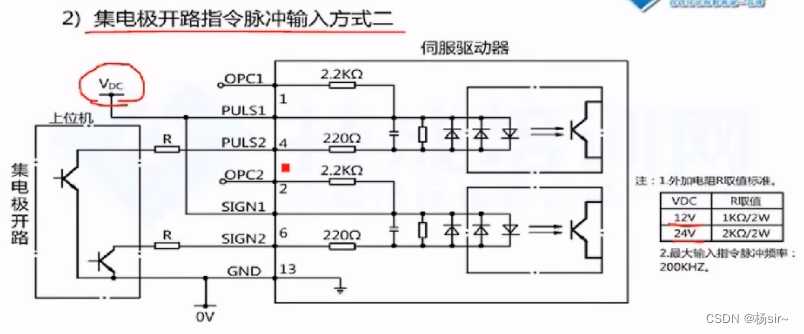
可以看到是一个漏极的设计方案
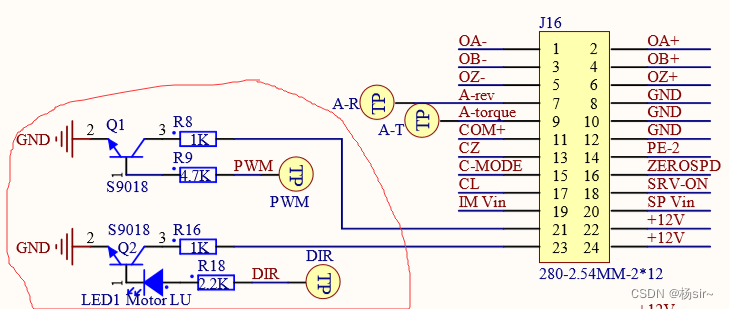
结合项目,可以发现,在项目中指令脉冲的速度控制和方向控制就是通过该种方式去设定的,项目中的电路如下所示:
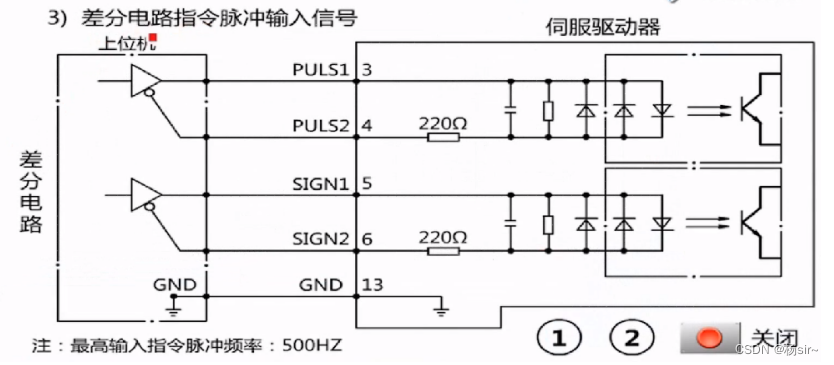
3.差分电路指令脉冲输入信号------低速
4.高速差分指令脉冲输入信号------高速
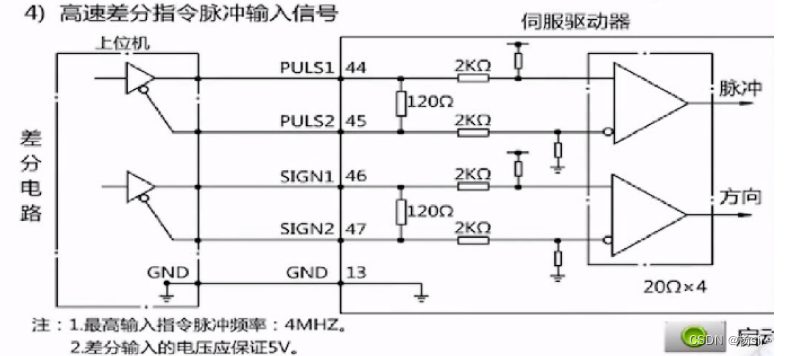
从上图可以看到,最高输入指令脉冲频率是4MHz,这是A5驱动器,我们在A6的书中,可以看到在A6系列最大的速度已经达到了8MHz。
5.位置指令输入信号特征
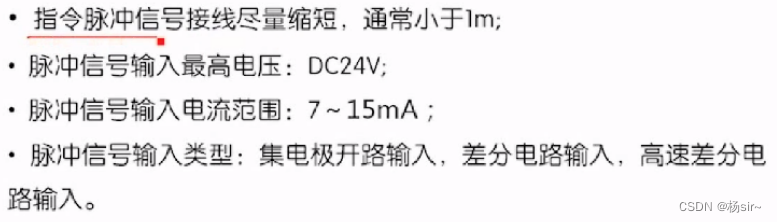
6.脉冲输入频率与脉宽对应关系

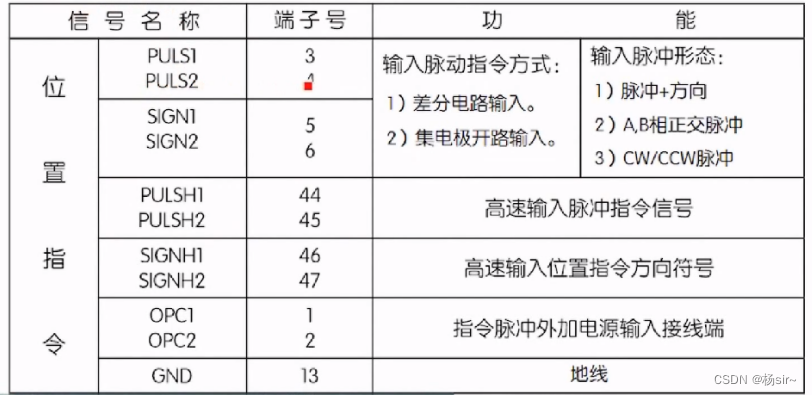
7.位置输入信号
CW和CCW是方向的意思
四、编码器分频输出电路
1.编码器分频输出电路—上位机为差分电路
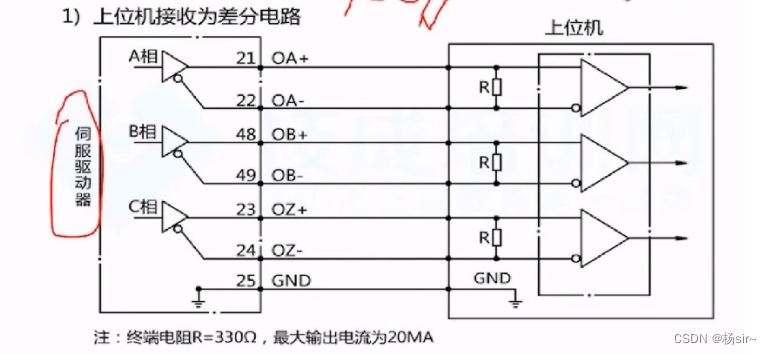
编码器的精度很高,反馈的脉冲级别是百万级别的,但是我们的上位机很难接收完全,所以要通过参数设置,把这个量级的脉冲分频成最终适合我们接收的量级。
在项目中,我们使用的就是上位机为差分电路的方式


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









