







伺服驱动器的控制方式以及相关速度控制模式的实验
一、伺服驱动器的控制方式
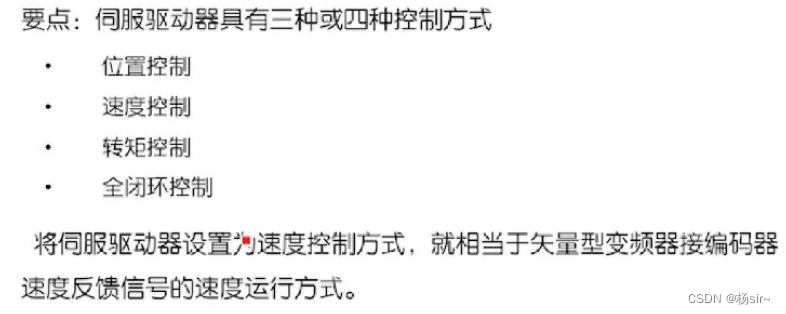
矢量型就是又有大小又有方向
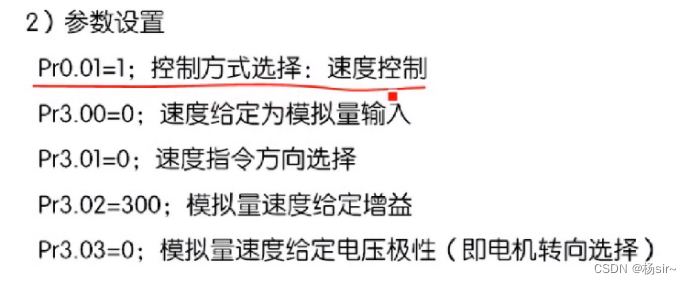
1. 具体选择哪种控制模式需要通过参数设置
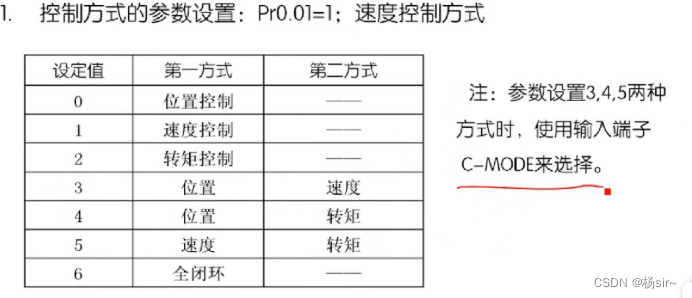
除了通过参数设置以外,还可以通过数字量输入开关C-MODE去切换相关的模式,结合项目中的硬件原理图去思考,可以知道这个模式的切换。方式的使用也受驱动器的类型控制,具体看驱动器的型号。
提出一个疑问,C-MODE是切换设定值还是方式?
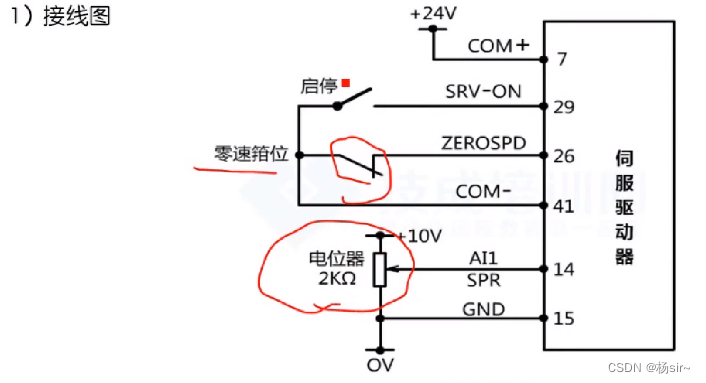
二、速度源由AI1端子模拟量输入
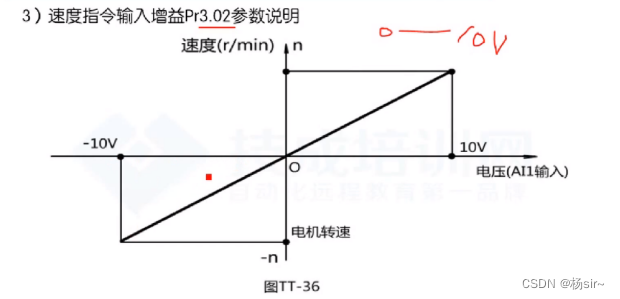
1. 速度源由AI1端子模拟量输入(模拟量控制方向和速度大小)

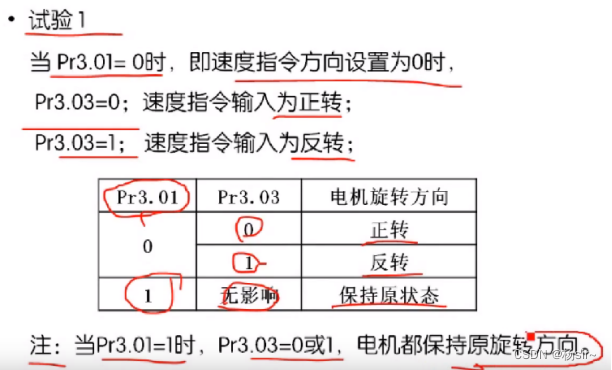
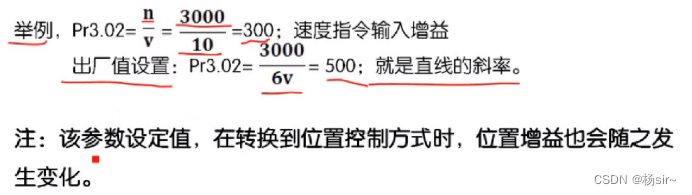
转换回位置控制时,位置增益会转换为出厂值设置
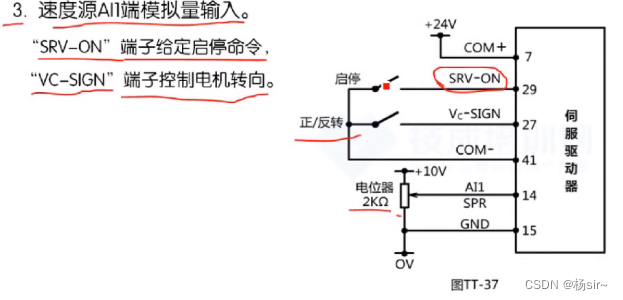
2. 速度源由AI1端子模拟量输入(模拟量控制速度大小、方向由Vc-SIGN控制)
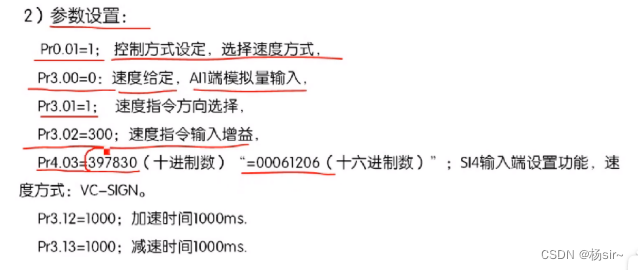
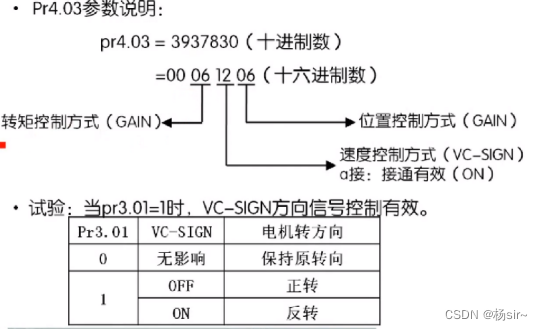
Pr3.01的参数设定为1,根据A6驱动器大本中的内容,伺服电机的转向只和VC-SIGN有关。
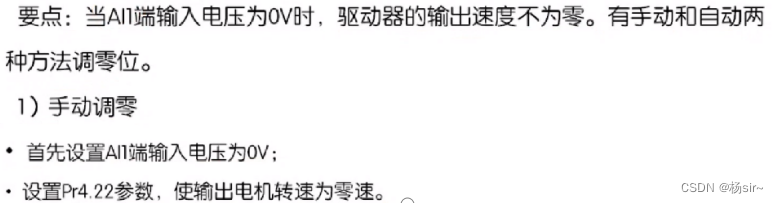
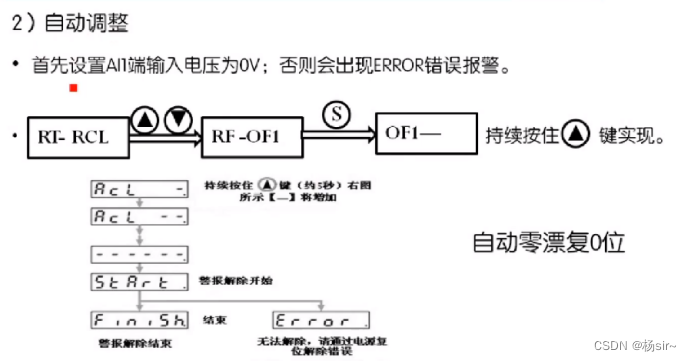
3. AI1端子模拟量输入零漂设置
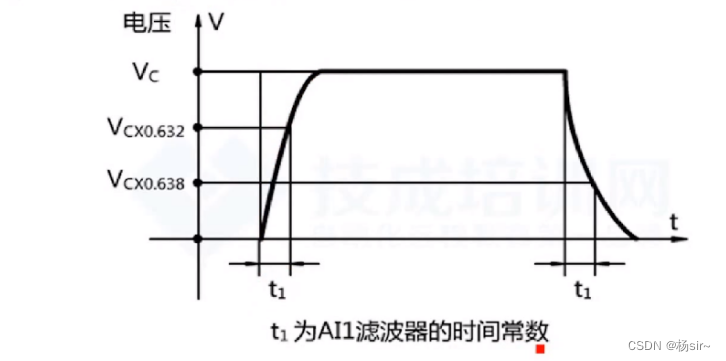
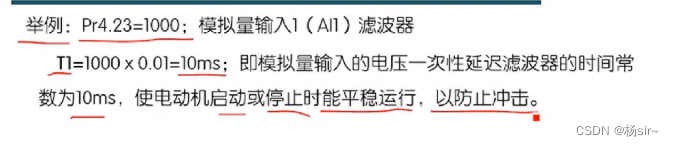
4. 模拟量输入AI1滤波器(Pr4.23)设置
在位置模式下,加减速时间是不起作用的,但是我们通过滤波器的设置就相当于有了一个缓冲的设置。
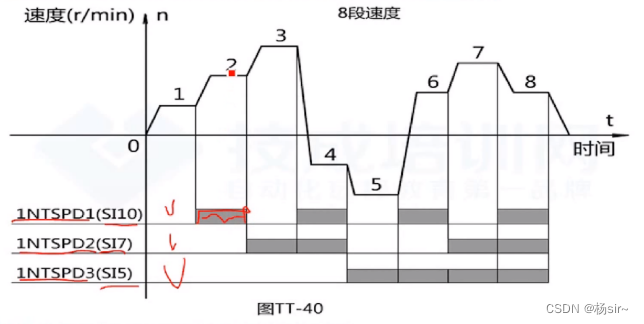
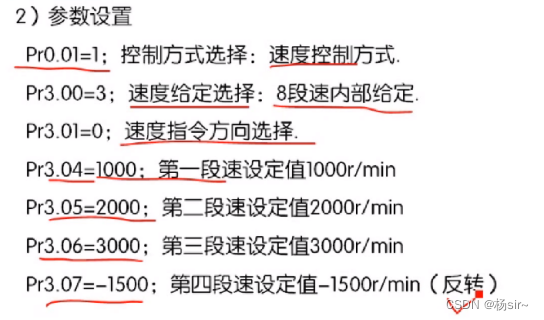
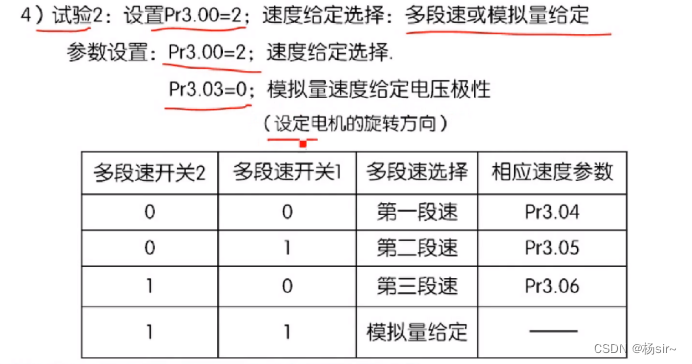
5. 多段速控制(内部速度给定设置)

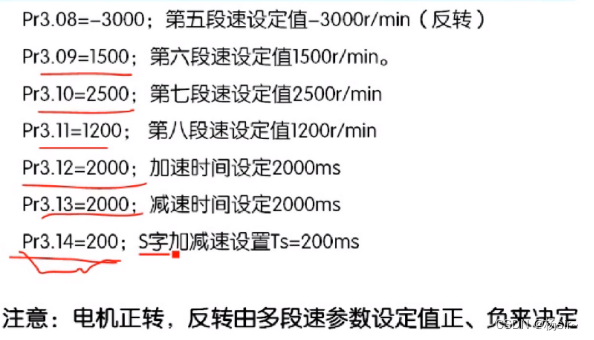

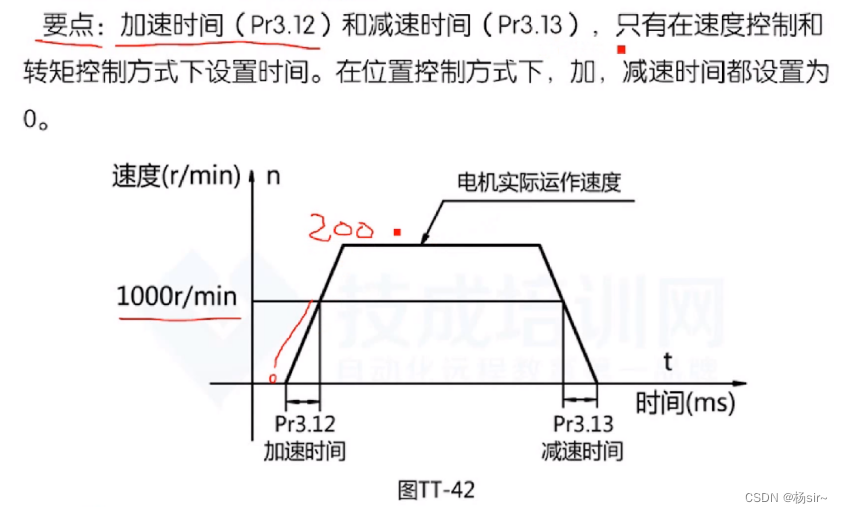
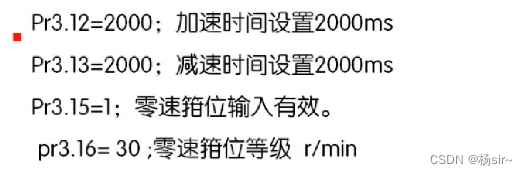
6.加速时间和减速时间设置
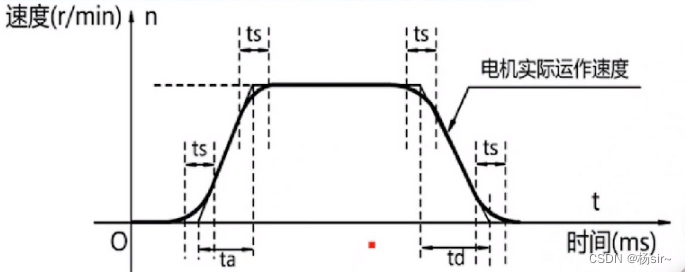
7.S字形加减速时间设置

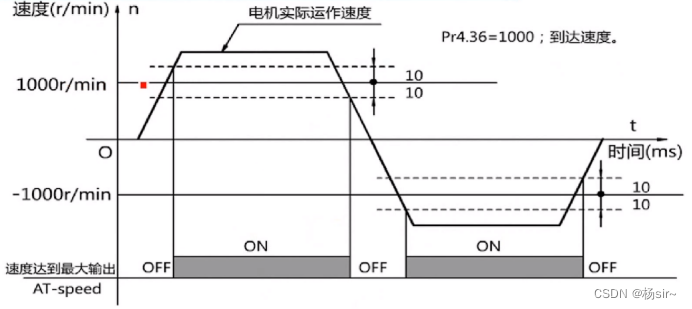
8.速度到达输出(AT-speed)


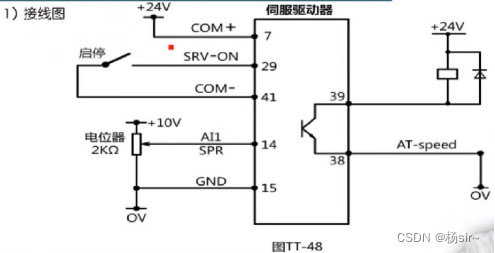
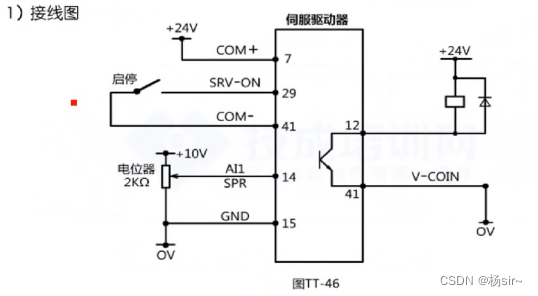
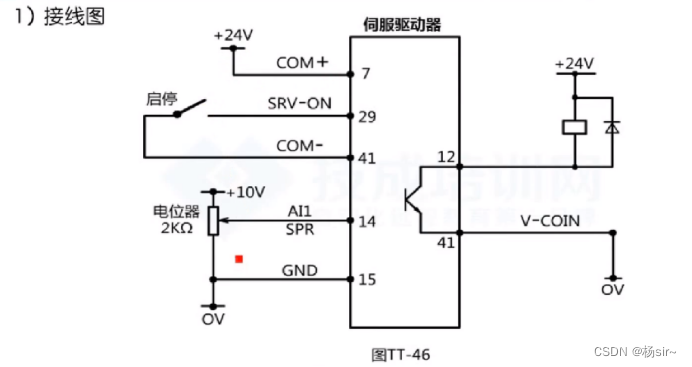
速度到达输出电路图
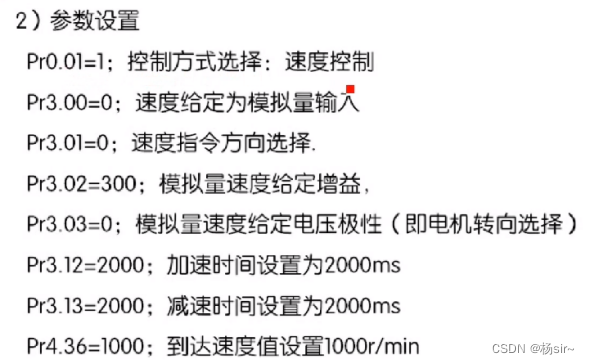
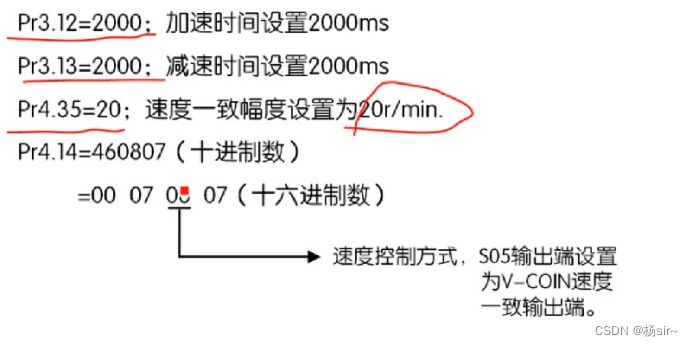
参数设置
9.速度一致输出
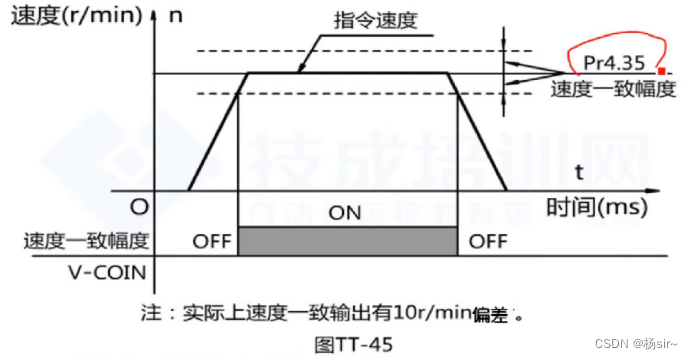
与速度到达之间的关系,前者属于经过那个设定的速度,后者是目标速度。
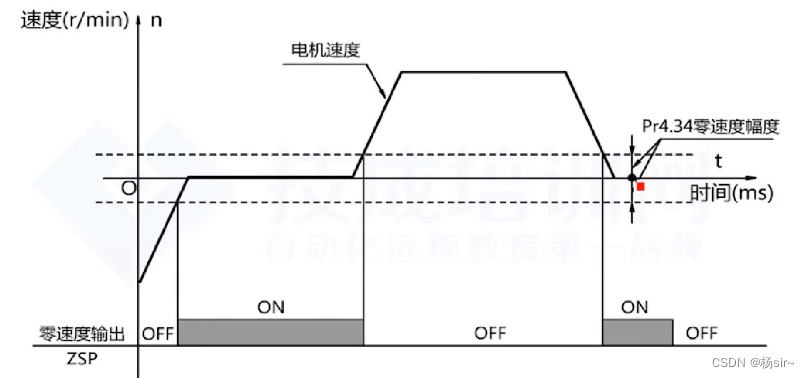
10.零速度输出信号

11.速度钳位功能ZEROSPD输入信号(速度和位置的转换信号)

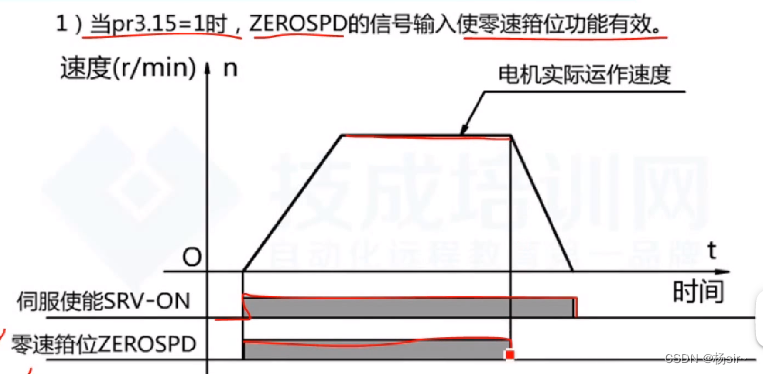
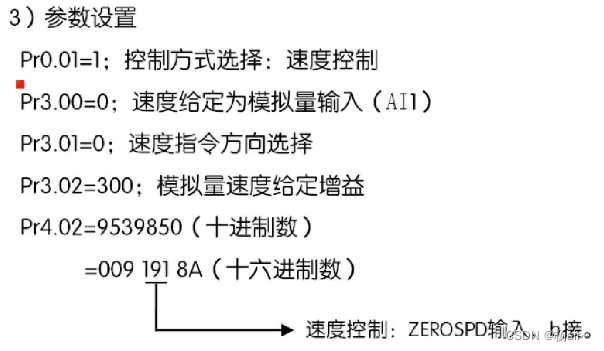
该数字量输入端口在项目中也出现了,但是具体是用来速度与位置切换的还是将速度减小置零的还需要在验证。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









