






Chapter 3 传统波束形成技术
来源:《Microphone Array Signal Processing》
作者:Jacob Benesty·Jingdong Chen·Yiteng Huang
出版社:Springer-Verlag Berlin and Heidelberg GmbH & Co. K
出版时间:2008年3月
此次翻译行为纯粹源于本人在“声纹识别、麦克风阵列信号处理、深度学习等”领域的学术探索需求,旨在促进相关知识在中文语境下的交流与研讨,助力同行及爱好者能够更为便捷地汲取前沿学术思想。本人即将通过 CSDN 平台以“博客文章”公开这一翻译成果。
需要着重强调的是,本翻译作品仅限定用于非商业性质的学术学习、研究探讨以及专业知识的交流分享活动。严禁任何个人、组织或商业机构在未经本人书面许可的情况下,将该翻译作品用于商业推广、付费获取、盈利性培训资料制作、二次售卖等一切以获取经济利益为目的的商业经营行为。CSDN 作为本次发表平台,其用户及访问者亦应严格遵循此规定。若有违反,本人必定依据相关法律法规,坚决捍卫自身权益,追究侵权者的法律责任,要求其赔偿因侵权行为给本人造成的一切损失,包括但不限于经济损失、名誉损害等。
鉴于学术论文翻译的严谨性要求极高,尽管本人已倾尽全力确保译文准确反映原文的学术内涵,然因语言转换过程中的固有难点与本人学识所限,译文或许尚存瑕疵。故而,本人热忱欢迎广大学术同仁、专业读者不吝赐教,提出宝贵的修改意见,携手为学术繁荣贡献力量。
特此声明!
3.1 引言
波束形成有着悠久的历史;它已经在许多领域得到了研究,比如雷达、声纳、地震学、通信等等。它可用于诸多不同的目的,例如检测信号是否存在、估计信号的到达方向(DOA),以及从那些受到噪声、干扰源和混响影响而失真的测量数据中增强所需信号。传统上,波束形成器被定义为一种空间滤波器,它对传感器阵列的输出进行处理,以便形成所需的波束(方向性)方向图。这样的空间滤波操作可以进一步分解为两个子过程:同步以及加权求和。同步过程是对每个传感器的输出进行适当时间量的延迟(或提前)处理,以便来自期望方向的信号分量实现同步。这一步骤中所需的信息是到达时间差(TDOA)。如果该信息无法事先得知,那么可以使用时延估计技术,根据阵列测量数据来对其进行估计。加权求和步骤,顾名思义,就是对已同步对齐的信号进行加权处理,然后将处理结果相加,从而得到一个输出结果。尽管这两个过程在控制阵列波束方向图方面都起着重要作用(同步部分控制波束指向方向,而加权求和过程控制主瓣的波束宽度以及旁瓣的特性),但在波束形成中,人们往往更关注确定加权系数的第二步。在许多应用中,加权系数可以根据预先指定的阵列波束方向图来确定,但通常更有利的做法是根据信号和噪声的特性以自适应的方式来估计这些系数。
基于空间滤波器的波束形成器是为窄带信号而开发的,这些窄带信号能够通过单一频率充分地表征其特性。对于具有丰富频率成分的宽带语音而言,此类波束形成器针对不同频率无法产生相同的波束方向图,并且波束宽度会随着频率的增加而变窄。如果我们使用这样一种波束形成器,当波束指向方向与信号源的入射角度不同时,信号源发出的信号将被低通滤波。此外,来自与波束形成器观察方向不同方向的噪声,在其整个频谱上不会被均匀衰减,这会在阵列输出中产生一些干扰性的伪像。因此,必须开发响应不变的宽带波束形成技术。设计这种宽带波束形成器的一种常见方法是进行子带分解,并在每个频率上独立设计窄带波束形成器。这相当于对阵列输出应用一个空时滤波器,也就是广为人知的滤波求和结构。那么,宽带波束形成的核心问题就变成了确定空时滤波器系数的问题之一。
本章将在信号增强的背景下讨论传统波束形成背后的基本理念。(需要注意的是,波束形成的基本原理在功能上是多样的。除了信号增强之外,波束形成的另一项主要应用是到达方向(DOA)的测量,这部分内容将在第9章中介绍。)我们将首先简要讨论使用阵列相较于使用单个传感器的优势。然后,我们将探究可用于解决窄带问题的方法有哪些。尽管这些窄带技术并非是为处理语音而开发的,但它们为在声学环境中更先进的宽带波束形成奠定了基础,并且有时在处理宽带信号时也能取得不错的效果。在窄带情况下所形成的许多基本概念是可以扩展应用到宽带情形中的。为了阐述这一点,我们将探讨(响应不变的)宽带波束形成背后的原理,这在麦克风阵列的背景下更受关注。
3.2 问题描述
在传感器阵列中,一种广泛使用的信号模型假定每个传播信道仅引入一些延迟和衰减。基于这一假设,并且在我们拥有一个由
N
N
N个传感器组成的阵列的情形下,在时刻
k
k
k的阵列输出可表示为
y
n
(
k
)
=
α
n
s
[
k
−
t
−
F
n
(
τ
)
]
+
v
n
(
k
)
=
x
n
(
k
)
+
v
n
(
k
)
,
n
=
1
,
2
,
…
,
N
,
\begin{align*} y_n(k) &= \alpha_ns[k - t - \mathcal{F}_n(\tau)] + v_n(k)\\ &= x_n(k) + v_n(k), n = 1,2,\ldots,N,\tag{3.1} \end{align*}
yn(k)=αns[k−t−Fn(τ)]+vn(k)=xn(k)+vn(k),n=1,2,…,N,(3.1)
其中,
α
n
\alpha_n
αn
(
n
=
1
,
2
,
…
,
N
(n = 1, 2, \ldots, N
(n=1,2,…,N)的取值范围在0到1之间,是由传播效应引起的衰减因子;
s
(
k
)
s(k)
s(k)是未知的源信号(可以是窄带或宽带信号);
t
t
t是从未知源到传感器1的传播时间;
v
n
(
k
)
v_n(k)
vn(k)是第
n
n
n个传感器处的加性噪声信号;
τ
\tau
τ是传感器1和传感器2之间的相对延迟(通常也称为到达时间差,the time difference of arrival,TDOA);
F
n
(
τ
)
\mathcal{F}_n(\tau)
Fn(τ)是传感器1和传感器
n
n
n之间的相对延迟,且
F
1
(
τ
)
=
0
\mathcal{F}_1(\tau ) = 0
F1(τ)=0,
F
2
(
τ
)
=
τ
\mathcal{F}_2(\tau ) = \tau
F2(τ)=τ。在本章中,我们做出一个关键假设:
τ
\tau
τ和
F
n
(
τ
)
\mathcal{F}_n(\tau)
Fn(τ)是已知的或者可以被估计出来,并且源信号和噪声信号是不相关的。我们还假设公式(3.1) 中的所有信号都是零均值且平稳的。
通过处理阵列观测值 y n ( k ) y_n(k) yn(k),我们能够获取许多关于信号源的有用信息,比如它的位置、频率等等。然而,本章所考虑的问题集中于降低加性噪声项 v n ( k ) v_n(k) vn(k)对期望信号可能产生的影响,从而提高信噪比(SNR)。不失一般性,我们将第一个传感器的信号视为参考信号。那么,本章的目标可以描述为:在考虑最终延迟的情况下,恢复 x 1 ( k ) = α 1 s ( k − t ) x_1(k)=\alpha_1s(k - t) x1(k)=α1s(k−t)。
3.3 延迟求和技术
使用阵列在增强对期望信号的接收的同时抑制不想要的噪声,其优势可以通过一个延迟求和(DS, delay-and-sum)波束形成器来说明。这样的一个波束形成器包含两个基本的处理步骤。第一步是将每个传感器的信号进行时移,时移的值对应于该传感器与参考传感器之间的到达时间差(TDOA)。根据公式(3.1) 中给出的信号模型,并且在进行时移操作之后,我们得到
y
a
,
n
(
k
)
=
y
n
[
k
+
F
n
(
τ
)
]
=
α
n
s
(
k
−
t
)
+
v
a
,
n
(
k
)
=
x
a
,
n
(
k
)
+
v
a
,
n
(
k
)
,
n
=
1
,
2
,
…
,
N
,
\begin{align*} y_{\mathrm{a},n}(k)&=y_n[k + \mathcal{F}_n(\tau)]\\ &=\alpha_ns(k - t)+v_{\mathrm{a},n}(k)\\ &=x_{\mathrm{a},n}(k)+v_{\mathrm{a},n}(k), n = 1,2,\ldots,N,\tag{3.2} \end{align*}
ya,n(k)=yn[k+Fn(τ)]=αns(k−t)+va,n(k)=xa,n(k)+va,n(k),n=1,2,…,N,(3.2)
其中,
v
a
,
n
(
k
)
=
v
n
[
k
+
F
n
(
τ
)
]
,
v_{\mathrm{a},n}(k) = v_n [k + \mathcal{F}_n(\tau)],
va,n(k)=vn[k+Fn(τ)],
并且下标“
a
\mathrm{a}
a”表示传感器信号经过了对齐处理。第二步是将时移后的信号相加,从而得到延迟求和(DS)波束形成器的输出:
z
D
S
(
k
)
=
1
N
∑
n
=
1
N
y
a
,
n
(
k
)
=
α
s
s
(
k
−
t
)
+
1
N
v
s
(
k
)
,
\begin{align*} z_{\mathrm{DS}}(k)&=\frac{1}{N}\sum_{n = 1}^{N}y_{\mathrm{a},n}(k)\\ &=\alpha_{\mathrm{s}}s(k - t)+\frac{1}{N}v_{\mathrm{s}}(k),\tag{3.3} \end{align*}
zDS(k)=N1n=1∑Nya,n(k)=αss(k−t)+N1vs(k),(3.3)
其中,
α
s
=
1
N
∑
n
=
1
N
α
n
,
v
s
(
k
)
=
∑
n
=
1
N
v
a
,
n
(
k
)
=
∑
n
=
1
N
v
n
[
k
+
F
n
(
τ
)
]
.
\begin{align*} \alpha_{\mathrm{s}}&=\frac{1}{N}\sum_{n = 1}^{N}\alpha_{n},\\ v_{\mathrm{s}}(k)&=\sum_{n = 1}^{N}v_{\mathrm{a},n}(k)\\ &=\sum_{n = 1}^{N}v_{n}[k + \mathcal{F}_{n}(\tau)]. \end{align*}
αsvs(k)=N1n=1∑Nαn,=n=1∑Nva,n(k)=n=1∑Nvn[k+Fn(τ)].
现在我们可以分析延迟求和(DS)波束形成器的输入信噪比(SNR)和输出信噪比。对于公式(3.1) 中给出的信号模型,相对于参考信号的输入信噪比为
SNR
=
σ
x
1
2
σ
v
1
2
=
α
1
2
σ
s
2
σ
v
1
2
,
(3.4)
\text{SNR}=\frac{\sigma_{x_1}^{2}}{\sigma_{v_1}^{2}} = \alpha_{1}^{2}\frac{\sigma_{s}^{2}}{\sigma_{v_1}^{2}},\tag{3.4}
SNR=σv12σx12=α12σv12σs2,(3.4)
其中
σ
x
1
2
=
E
[
x
1
2
(
k
)
]
\sigma_{x_1}^{2}=E[x_1^{2}(k)]
σx12=E[x12(k)],
σ
v
1
2
=
E
[
v
1
2
(
k
)
]
\sigma_{v_1}^{2}=E[v_1^{2}(k)]
σv12=E[v12(k)]以及
σ
s
2
=
E
[
s
2
(
k
)
]
\sigma_{s}^{2}=E[s^{2}(k)]
σs2=E[s2(k)]分别是信号
x
1
(
k
)
x_1(k)
x1(k)、
v
1
(
k
)
v_1(k)
v1(k)和
s
(
k
)
s(k)
s(k)的方差。在延迟求和(DS)处理之后,输出信噪比可以表示为公式(3.3)右侧第一项和第二项的方差之比 :
oSNR
=
N
2
α
s
2
E
[
s
2
(
k
−
t
)
]
E
[
v
s
2
(
k
)
]
=
N
2
α
s
2
σ
s
2
σ
v
s
2
=
(
∑
n
=
1
N
α
n
)
2
σ
s
2
σ
v
s
2
,
\begin{align*} \text{oSNR}&=N^{2}\alpha_{\mathrm{s}}^{2}\frac{E[s^{2}(k - t)]}{E[v_{\mathrm{s}}^{2}(k)]}\\ &=N^{2}\alpha_{\mathrm{s}}^{2}\frac{\sigma_{s}^{2}}{\sigma_{v_{\mathrm{s}}}^{2}}\\ &=\left(\sum_{n = 1}^{N}\alpha_{n}\right)^{2}\frac{\sigma_{s}^{2}}{\sigma_{v_{\mathrm{s}}}^{2}},\tag{3.5} \end{align*}
oSNR=N2αs2E[vs2(k)]E[s2(k−t)]=N2αs2σvs2σs2=(n=1∑Nαn)2σvs2σs2,(3.5)
其中,
σ
v
s
2
=
E
{
[
∑
n
=
1
N
v
n
[
k
+
F
n
(
τ
)
]
]
2
}
=
∑
n
=
1
N
σ
v
n
2
+
2
∑
i
=
1
N
−
1
∑
j
=
i
+
1
N
ϱ
v
i
v
j
,
\begin{align*} \sigma_{v_{\mathrm{s}}}^{2}&=E\left\{\left[\sum_{n = 1}^{N}v_{n}[k + \mathcal{F}_{n}(\tau)]\right]^{2}\right\}\\ &=\sum_{n = 1}^{N}\sigma_{v_{n}}^{2}+2\sum_{i = 1}^{N - 1}\sum_{j = i + 1}^{N}\varrho_{v_{i}v_{j}},\tag{3.6} \end{align*}
σvs2=E⎩
⎨
⎧[n=1∑Nvn[k+Fn(τ)]]2⎭
⎬
⎫=n=1∑Nσvn2+2i=1∑N−1j=i+1∑Nϱvivj,(3.6)
其中
σ
v
n
2
=
E
[
v
n
2
(
k
)
]
\sigma_{v_{n}}^{2}=E[v_{n}^{2}(k)]
σvn2=E[vn2(k)]是噪声信号
v
n
(
k
)
v_{n}(k)
vn(k)的方差,而
ϱ
v
i
v
j
=
E
{
v
i
[
k
+
F
i
(
τ
)
]
v
j
[
k
+
F
j
(
τ
)
]
}
\varrho_{v_{i}v_{j}} = E\{v_{i}[k + \mathcal{F}_{i}(\tau)]v_{j}[k + \mathcal{F}_{j}(\tau)]\}
ϱvivj=E{vi[k+Fi(τ)]vj[k+Fj(τ)]}是
v
i
(
k
)
v_{i}(k)
vi(k)与
v
j
(
k
)
v_{j}(k)
vj(k)之间的互相关函数 。
仅当以下情况时,延迟求和(DS)波束形成器才有意义 :
oSNR
>
SNR
.
(3.7)
\text{oSNR}>\text{SNR}.\tag{3.7}
oSNR>SNR.(3.7)
这意味着信号
z
D
S
(
k
)
z_{\mathrm{DS}}(k)
zDS(k)的噪声会比任何一个麦克风输出信号
y
n
(
k
)
y_{n}(k)
yn(k)的噪声都小,并且它有可能是
x
1
(
k
)
x_{1}(k)
x1(k)的一个很好的近似。
特殊情况 1
在这种特殊情况下,我们假设麦克风处的噪声信号是不相关的,即对于 ∀ i \forall{i} ∀i, j = 1 , 2 , … , N j = 1, 2, \ldots, N j=1,2,…,N, i ≠ j i \neq j i=j, ϱ v i v j = 0 \varrho_{v_{i}v_{j}} = 0 ϱvivj=0,并且它们都具有相同的方差,即 σ v 1 2 = σ v 2 2 = ⋯ = σ v N 2 \sigma_{v_{1}}^{2}=\sigma_{v_{2}}^{2}=\cdots=\sigma_{v_{N}}^{2} σv12=σv22=⋯=σvN2。我们还假设所有的衰减因子都等于1(即对于 ∀ n \forall{n} ∀n, α n = 1 \alpha_{n} = 1 αn=1)。那么可以很容易地验证:
oSNR
>
N
⋅
SNR
.
(3.7)
\text{oSNR}>N\cdot\text{SNR}.\tag{3.7}
oSNR>N⋅SNR.(3.7)
有趣的是,在上述条件下,在传感器输出之间进行简单的时移和相加操作会使信噪比提高的倍数等于传感器的数量。
特殊情况 2
在这里,我们仅假设噪声信号具有相同的能量,并且所有的衰减因子都等于(1)。在这种情况下,我们有:
oSNR
=
N
1
+
ρ
s
⋅
SNR
,
(3.9)
\text{oSNR}=\frac{N}{1 + \rho_{\mathrm{s}}}\cdot\text{SNR},\tag{3.9}
oSNR=1+ρsN⋅SNR,(3.9)
其中,
ρ
s
=
2
N
∑
i
=
1
N
−
1
∑
j
=
i
+
1
N
ρ
v
i
v
j
,
ρ
v
i
v
j
=
ϱ
v
i
v
j
σ
v
i
σ
v
j
.
\begin{align*} \rho_{\mathrm{s}}&=\frac{2}{N}\sum_{i = 1}^{N - 1}\sum_{j = i + 1}^{N}\rho_{v_{i}v_{j}},\\ \rho_{v_{i}v_{j}}&=\frac{\varrho_{v_{i}v_{j}}}{\sigma_{v_{i}}\sigma_{v_{j}}}. \end{align*}
ρsρvivj=N2i=1∑N−1j=i+1∑Nρvivj,=σviσvjϱvivj.
ρ v i v j \rho_{v_{i}v_{j}} ρvivj是相关系数,满足 ∣ ρ v i v j ∣ ≤ 1 \vert\rho_{v_{i}v_{j}}\vert\leq1 ∣ρvivj∣≤1,通常该系数取值在- 1到1之间。当麦克风处的噪声信号完全相关,即 ρ v i v j = 1 \rho_{v_{i}v_{j}} = 1 ρvivj=1时, ∑ i = 1 N − 1 ∑ j = i + 1 N ρ v i v j = N ( N − 1 ) 2 \sum_{i = 1}^{N - 1}\sum_{j = i + 1}^{N}\rho_{v_{i}v_{j}}=\frac{N(N - 1)}{2} ∑i=1N−1∑j=i+1Nρvivj=2N(N−1) ,此时 oSNR = SNR \text{oSNR}=\text{SNR} oSNR=SNR ,延迟求和(DS)技术无增益。随着相关系数 ρ v i v j \rho_{v_{i}v_{j}} ρvivj从1减小到0,信噪比增益增加。某些情况下, ρ v i v j \rho_{v_{i}v_{j}} ρvivj可为负,比如噪声信号来自同一 点声源时,此时信噪比可能高于 N N N甚至趋于无穷大。
另一种说明延迟求和(DS)波束形成器性能的方法是通过研究相应的波束方向图(“beam pattern”有时写成复合形式“beampattern”,也被称为方向性图或空间方向图),它能全面描述阵列系统的输入 - 输出特性。从前面的分析中,我们很容易看出,延迟求和(DS)波束形成器实际上是一个
N
N
N点空间滤波器,其波束方向图被定义为该空间滤波器方向响应的模值。从公式(3.2)和(3.3),我们可以验证该空间滤波器的第
n
n
n个系数为
1
N
e
j
2
π
f
F
n
(
τ
)
\frac{1}{N}e^{j2\pi f\mathcal{F}_{n}(\tau)}
N1ej2πfFn(τ),其中
f
f
f表示频率。这个滤波器的方向响应可以通过进行傅里叶变换得到。由于
F
n
(
τ
)
\mathcal{F}_{n}(\tau)
Fn(τ)既取决于阵列的几何结构,又取决于声源的位置,所以延迟求和(DS)波束形成器的波束方向图应该是阵列几何结构和声源位置的函数。此外,波束方向图还是传感器数量以及信号频率的函数。
现在假设我们有一个等间距线性阵列,它由
N
N
N个全向传感器组成,如图3.1所示。
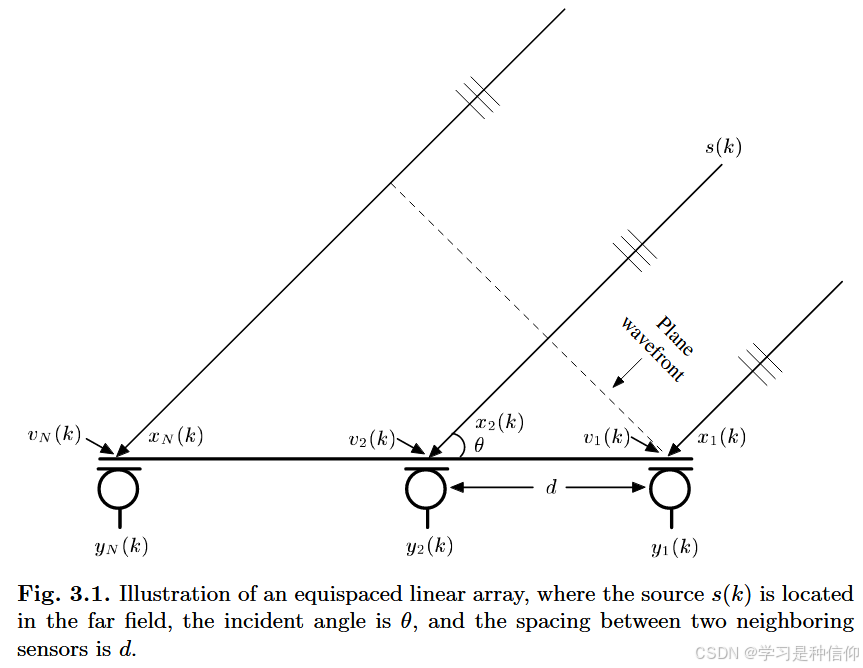
图3.1展示了一个等间距线性阵列,其中声源
s
(
k
)
s(k)
s(k)位于远场,入射角为
θ
\theta
θ,两个相邻传感器之间的间距为
d
d
d 。
如果我们将两个相邻传感器之间的间距表示为
d
d
d,并假设声源在远场,且波射线以入射角
θ
\theta
θ到达该阵列,那么第
n
n
n个传感器与参考传感器之间的时延差(TDOA)可以表示为 :
F
n
(
τ
)
=
(
n
−
1
)
τ
=
(
n
−
1
)
d
cos
(
θ
)
/
c
,
(3.10)
\mathcal{F}_{n}(\tau)=(n - 1)\tau=(n - 1)d\cos(\theta)/c,\tag{3.10}
Fn(τ)=(n−1)τ=(n−1)dcos(θ)/c,(3.10)
其中
c
c
c表示空气中的声速。在这种情况下,延迟求和(DS)滤波器的方向响应(它是该滤波器的空间傅里叶变换)可以表示为 :
S
D
S
(
ψ
,
θ
)
=
1
N
∑
n
=
1
N
[
e
j
2
π
(
n
−
1
)
f
d
cos
(
θ
)
/
c
]
e
−
j
2
π
(
n
−
1
)
f
d
cos
(
ψ
)
/
c
=
1
N
∑
n
=
1
N
e
−
j
2
π
(
n
−
1
)
f
d
[
cos
(
ψ
)
−
cos
(
θ
)
]
/
c
,
(3.11)
\begin{aligned} \mathcal{S}_{\mathrm{DS}}(\psi, \theta) &= \frac{1}{N} \sum_{n = 1}^{N} \left[ e^{j 2 \pi (n - 1) f d \cos(\theta)/c} \right] e^{-j 2 \pi (n - 1) f d \cos(\psi)/c} \\ &= \frac{1}{N} \sum_{n = 1}^{N} e^{-j 2 \pi (n - 1) f d [\cos(\psi) - \cos(\theta)]/c},\tag{3.11} \end{aligned}
SDS(ψ,θ)=N1n=1∑N[ej2π(n−1)fdcos(θ)/c]e−j2π(n−1)fdcos(ψ)/c=N1n=1∑Ne−j2π(n−1)fd[cos(ψ)−cos(θ)]/c,(3.11)
其中
ψ
\psi
ψ(
0
≤
ψ
≤
π
0\leq\psi\leq\pi
0≤ψ≤π)是方向角。那么波束方向图可表示为 :
A
D
S
(
ψ
,
θ
)
=
∣
S
D
S
(
ψ
,
θ
)
∣
=
∣
sin
[
N
π
f
d
(
cos
ψ
−
cos
θ
)
/
c
]
N
sin
[
π
f
d
(
cos
ψ
−
cos
θ
)
/
c
]
∣
.
\begin{align*} \mathcal{A}_{\mathrm{DS}}(\psi,\theta)&=\vert\mathcal{S}_{\mathrm{DS}}(\psi,\theta)\vert\\ &=\left|\frac{\sin\left[N\pi fd(\cos\psi - \cos\theta)/c\right]}{N\sin\left[\pi fd(\cos\psi - \cos\theta)/c\right]}\right|.\tag{3.12} \end{align*}
ADS(ψ,θ)=∣SDS(ψ,θ)∣=
Nsin[πfd(cosψ−cosθ)/c]sin[Nπfd(cosψ−cosθ)/c]
.(3.12)
图3.2绘制了一个有十个传感器的等间距线性阵列的波束方向图,其中间距
d
=
8
c
m
d = 8cm
d=8cm,入射角
θ
=
9
0
∘
\theta = 90^{\circ}
θ=90∘,频率
f
=
2
k
H
z
f = 2kHz
f=2kHz。该图总共有9个波束(一般来说,在
0
∘
0^{\circ}
0∘到
18
0
∘
180^{\circ}
180∘范围内的波束数量等于
N
−
1
N - 1
N−1)。其中幅度最高的波束被称为主瓣,其余所有波束都称为旁瓣。与主瓣相关的一个重要参数是波束宽度(主瓣宽度),它被定义为主瓣两侧第一个过零点之间的区域。对于上述线性阵列,波束宽度可以很容易地通过公式
2
cos
−
1
[
c
/
(
N
d
f
)
]
2\cos^{- 1}[c/(Ndf)]
2cos−1[c/(Ndf)]计算得出。该数值会随着传感器数量的增加、相邻传感器间距的增大以及信号频率的升高而减小。旁瓣的高度代表了在期望观察方向以外的其他方向上,噪声和干扰声源的增益模式。在阵列和波束形成设计中,我们希望使旁瓣尽可能低,这样来自观察方向以外方向的信号就会尽可能地被衰减。此外,对于长度为
N
N
N的空间滤波器,总会存在
N
−
1
N - 1
N−1个零值点(零点)。我们可以设计加权系数,使得这些零点能够被放置在干扰声源的方向上。这与自适应波束形成技术相关,并且将在接下来的章节中更详细地阐述。
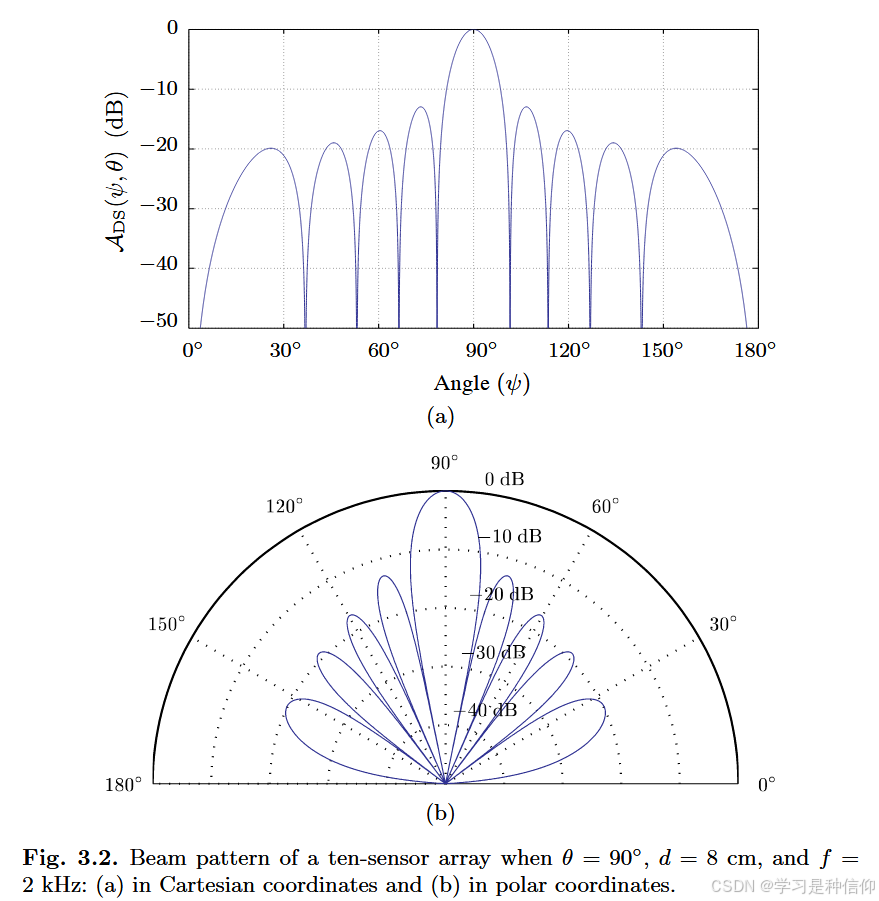
图3.2 当
θ
=
9
0
∘
\theta = 90^{\circ}
θ=90∘、
d
=
8
c
m
d = 8cm
d=8cm且
f
=
2
k
H
z
f = 2kHz
f=2kHz时,十传感器阵列的波束方向图:(a) 笛卡尔坐标系下 ;(b) 极坐标系下。
在结束本节内容之前,我们想要指出传感器间距存在的一个潜在问题。从前面的分析可知,阵列的波束宽度会随着间距
d
d
d的增加而减小。所以,如果我们想要更尖锐的波束,只需增大间距
d
d
d即可,这会使阵列孔径变大。一般来说,这将带来更好的降噪效果。因此,在阵列设计中,我们期望将间距设置得尽可能大。然而,当
d
d
d大于
λ
/
2
=
c
/
(
2
f
)
\lambda/2 = c/(2f)
λ/2=c/(2f)时(其中
λ
\lambda
λ是信号的波长),就会出现空间混叠现象。为了直观地呈现这个问题,我们绘制了一个与图3.2(b)中使用的相同的等间距线性阵列的波束方向图。信号频率
f
f
f仍然是
2
k
H
z
2kHz
2kHz。但这一次,阵列间距为
24
c
m
24cm
24cm。相应的波束方向图如图3.3所示。这一次,我们看到有三个最大幅度为1的大波束。另外两个被称为栅瓣。从出现栅瓣的方向传播来的信号,与从主瓣方向传播来的信号是无法区分的。这种模糊性通常被称为空间混叠。为了避免空间混叠,阵列间距必须满足
d
≤
λ
2
=
c
2
f
d\leq\frac{\lambda}{2}=\frac{c}{2f}
d≤2λ=2fc。通过与奈奎斯特采样定理进行类比,这一结果可以被理解为一种空间采样定理。
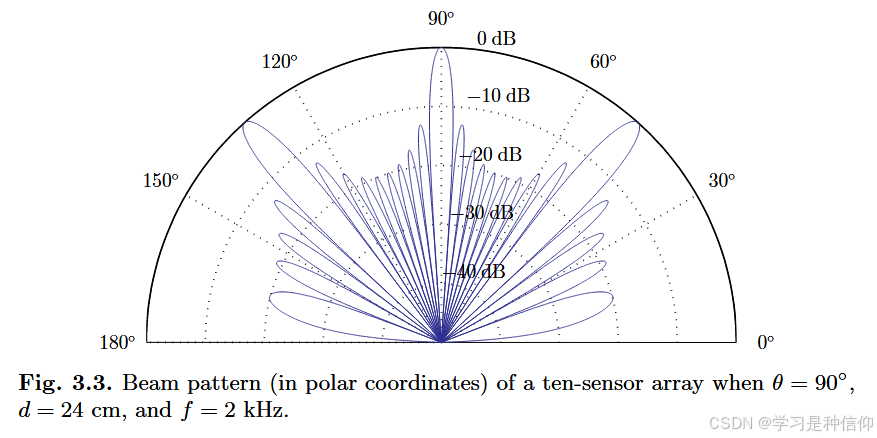
图3.3 当
θ
=
9
0
∘
\theta = 90^{\circ}
θ=90∘、
d
=
24
c
m
d = 24cm
d=24cm且
f
=
2
k
H
z
f = 2kHz
f=2kHz时,十传感器阵列的波束方向图(极坐标形式)。

















 169
169

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









