






MPU9250数据转换
1. MPU9250
1.1 MPU9250介绍
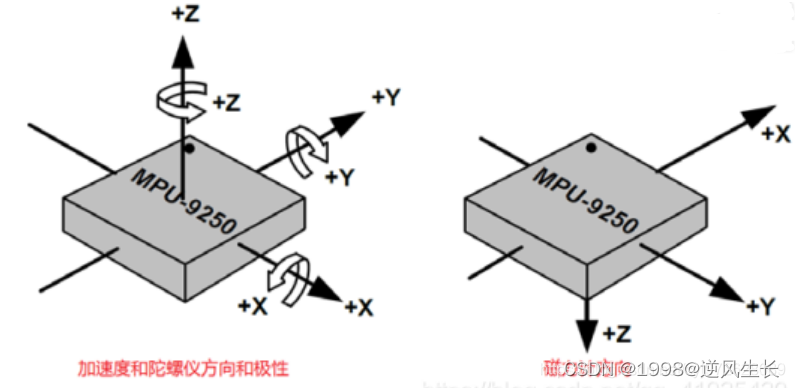
1)MPU9250 内部集成有 3 轴陀螺仪、3 轴加速度计和 3 轴磁力计
2)输出: 16 位的数字量;
3) 通过集成电路总线 接口和单片机进行数据交互
4)传输速率:传输速率可达 400 kHz /s
5)陀螺仪角速度测量范围:陀螺仪的角速度测量范围最高达±2000(° /s),具有良好的动态响应特性。
6)加速度计测量范围:加速度计的测量范围最大为±16g( g 为重力加速度),静态测量精度高。
7)磁力计测量范围:磁力计采用高灵度霍尔型传感器进行数据采集,磁感应强度测量范围为±4800μT,可用于对偏航角的辅助测量。
2. 数据转换
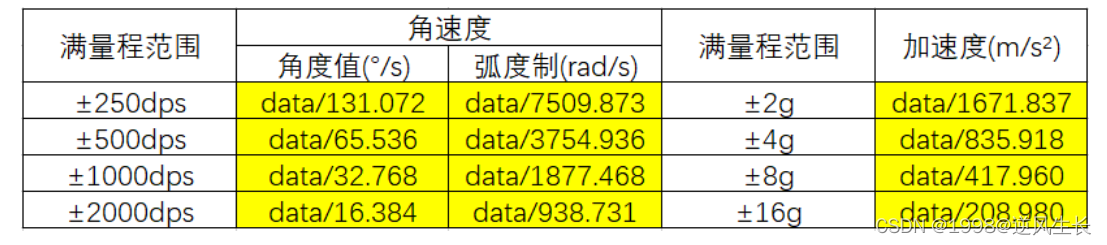
对陀螺仪来说,当函数输入为0时,对应的量程范围为 -250(°/s) ~ +250(°/s);
当函数输入为1时,对应的量程范围为 -500(°/s) ~ +500(°/s),以此类推。
对加速度来说,当函数输入为0时,对应的量程范围为 -2×g(m/s²) ~ +2×g(m/s²);
当函数输入为1时,对应的量程范围为 -4×g(m/s²) ~ +4×g(m/s²),以此类推(g为重力加速度)。
2.1 陀螺仪数据转换
- 假设我们设置函数的输入为3,即陀螺仪满量程范围为-2000(°/s) ~ +2000(°/s)。
我们知道MPU9250输出都是16位的数字量,即输出的原始数据范围为 -32768 ~ +32768。它对应了陀螺仪的满量程范围,即当读到的数据为32768时,它的角速度为2000(°/s)。
假设我们读取到的数据为data,则
真实的角速度大小为:data×2000/32768(°/s)=data/16.384(°/s)。
转换为弧度制为:(data/16.384)×pi/180(rad/s)=data/938.734(rad/s)
2.2 加速度数据转换
假设我们设置函数的输入为3,即加速度满量程范围为-16×g(m/s²) ~ +16×g(m/s²)。
MPU9250输出都是16位的数字量
即输出的原始数据范围为 -32768 ~ +32768。它对应了加速度的满量程范围,即当读到的数据为32768时,它的加速度为16×g(m/s²)。
假设我们读到的数据为data,则
真实的加速度大小为:data×16×9.8/32768(m/s²)=data/208.98(m/s²)
采用不同量程范围时进行数据的转换,其中data为读取到的原始数据。
All is well !!!














 7112
7112











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









