






文章目录
MPU9250是一款9轴运动跟踪装置,在它3x3x1mm的封装中集成了3轴陀螺仪,3轴加速度计,3轴磁力计以及运动处理器(DMP)并且兼容 MPU6515。通过IIC,可以直接输出9轴的全部数据。因此它也是四轴姿态结算的基础,所以能够正确获取MPU9250的数据是十分重要的。
本章目的:了解 MPU9250 配置,陀螺仪数据,加速度计数据读取。
涉及外设: MPU9250,IIC
MPU9250 简介
概述
MPU9250是一个QFN封装的符合芯片,由两部分组成。一个是3轴加速度,3轴陀螺仪,另一组是3轴磁力计。所以MPU9250是一个9轴
运动跟踪装置。(并且它内含数字运动处理器DMP并兼容MPU6515)。通过IIC,可以全部输出9轴数据。这个芯片也为兼容其他传感器开放了辅助IIC接口,比如压力传感器。
MPU9250具有三个16位加速度AD输出,三个16位陀螺仪AD输出,三个6位磁力计AD输出。提供可编程陀螺仪参数选择(±250,±500,±1000,and±2000°/s(dps)),可编程加速度参数选择(±2g,±4g,±8g,±16g)。该装置提供IIC和SPI的接口,2.4-3.6v的供电电压,还有单独的数字IO口,支持1.7V到VDD。通信采用400KHz的IIC和1MHz的SPI,若需要更快的速度,可以用SPI在20MHz的模式下直接读取传感器和中断寄存器。
特性
这里☞的是三轴陀螺仪,加速度计,磁力计以及芯片的物理特性,可以百度搜索,这里不再写出。
MPU9250的通信协议
四轴原理图
这里以一个原理图来说明:
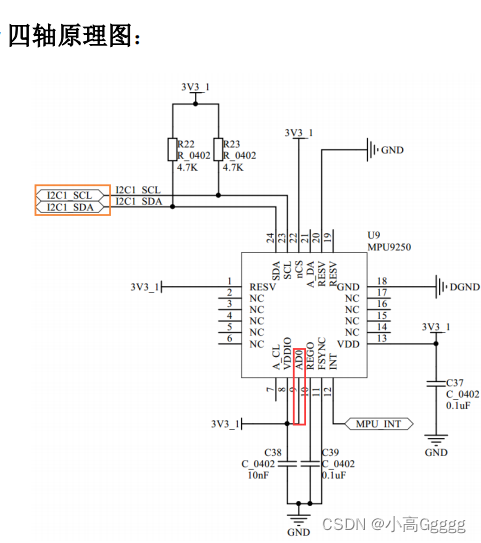
对于一些外设,MPU9250和FBM320(气压计)与MCU通信时,一般都是作为IIC从机,MCU作为主机。(主机从外设读取实时数据)。IIC进行一主机对多从机通信时候,首先要确定与哪个从机进行通信,就要确定从机的地址。
MPU9250地址确定
MPU9250 作为从机时候,它的地址为7位 110100X(B)。这个地址的LSB(低)位由AD0引脚的电平确定,这样就可以使得一个系统中同时连接2个MPU9250了。(AD0为低电平时,X为0,高电平X为1)。这里的X为地址位,因为我们只用了一个MPU9250,由上面的图可以知道,接的是3.3V的高电平,所以X为1.因此,这里MPU9250的地址为1101001,十六进制为0X69.
MPU9250与IIC通信时序
**写** MPU9250 寄存器的方法:
1.主机发送开始信号和从机的7个地址位再加上1位的写入位。在第九个时钟信号的时候,产生应答。
2。主机输出寄存器地址,对应的从机再产生应答,传输过程可以有停止信号随时停止。ACK响应后,数据可以继续输入,除非没有产生停止位。芯片内部自带的递增寄存器可以自动将数据写入相应的寄存器。

**读**MPU9250 寄存器的方法:
1.主机发送开始信号和从机的7个地址位再加上1位的读位。此时寄存器变为可读模式。
2.此时会收到 MPU9250 的返回信号 ACK。
3.然后主机再次发送开始信号和地址,MPU9250此时会发回应信号ACK和数据。当主机发送NACK或停止位后通讯停止。NACK信号就是第9个时钟脉冲,SDA保持高电平。

MPU9250获取原始数据
MPU9250的初始化流程
1)MPU9250的初始化流程:
1.检查MCU与MPU9250是否通信成功
2.设置MPI9250为复位状态+100ms复位延时。
3.唤醒MPU9250,选择PLL为时钟源
4.配置六轴数据全部输出(3轴加速度计,3轴陀螺仪,这里我没用磁力计)。
5.禁止所有中断。
6.设置MPU92050内部采样频率
7.设置陀螺仪和加速度的满量程范围
8.设置陀螺仪和加速度的输出低通滤波
配置MPU9250初始化需要通读《MPU-9250-Register-Map》手册,找到相应的寄存器进行我们需要模式的配置。由于它的寄存器较多,120个并且为纯英文,所以我将用到的寄存器翻译为中文。
对上面步骤进行具体操作:
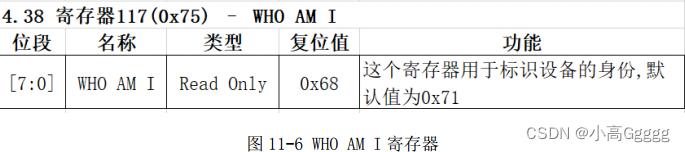
我们上面第一步的检查是否通信正常,就是读取WHO AM I寄存器的值是否为0X71。通过调用封装的 MPU92550_ReadByte();来读取MPU92550_ReadByte(0X75,&ID);如果ID=0x71;检查通过。
设置MPU9250为复位状态,需要设置电源管理寄存器1,寄存器位图如下:
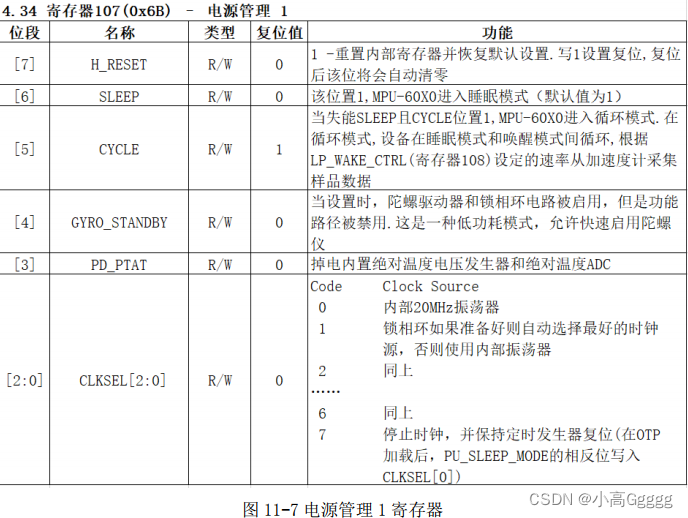
根据图,电源管理1寄存器的第7位H_RESET位置1就是对MPU9250复位,并且它成功复位后H_RESET位自动清零。
所以复位时这个寄存器需要写入的值为0X80。复位需要时间,所以设置寄存器后要延时100ms.
复位后开启六轴传感器数据都输出,需要设置电源管理2,电源管理2位图如下:
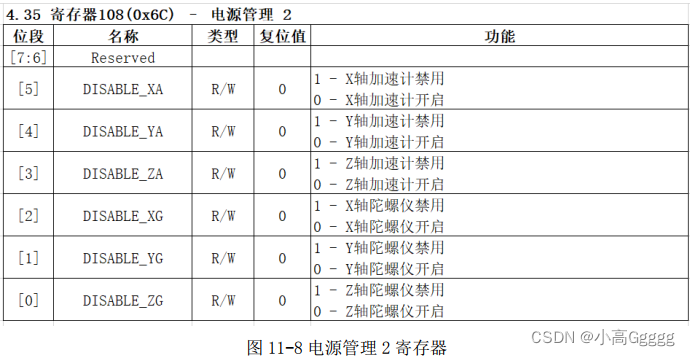
由电源管理2的描述,可知将位 【5:0】位设置为0即可开启,3轴陀螺仪,加速度仪的数据全部输出。
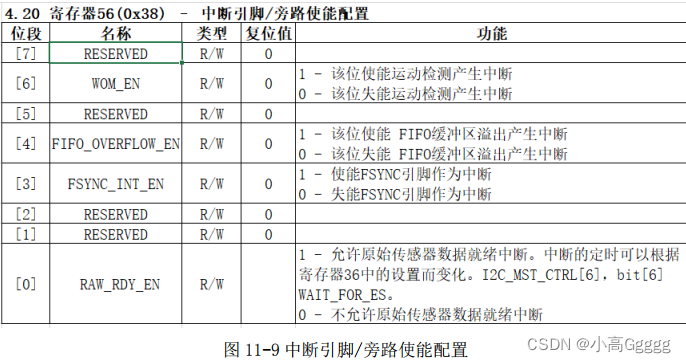
上图是中断引脚/旁路使能配置寄存器,我这里的四轴是轮询读取原始数据的方法,所有不需要开启任何中断,将该寄存器设置为0X00即可。
下面我们来看一下MPU9250采样率分频寄存器:
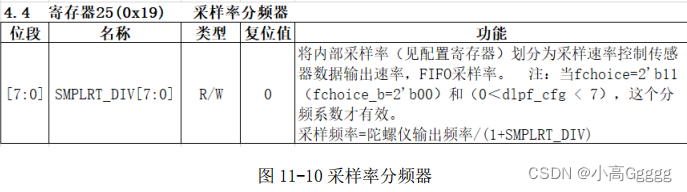
这个寄存器需要与后面要讲的配置寄存器配合使用,我们通过设置该SMOLRT_DIV[7:0]的大小来改变MPU9250的采样频率,公式如下:
采样频率=陀螺仪输出率/(1+SMPLRT_DIV)
采样频率是根据陀螺仪输出频率分频得到的,我们下面会设置陀螺仪输出频率为1KHz,我的四轴的姿态解算频率为500Hz,所以我们采样频率不能低于500Hz,这里我不在分频,让采样频率为1KHz。SMPLRT_DIV[7:0]需要设置成0X00;
下面我们配置陀螺仪的满量程范围,我们知道MPU9250采集的角速度是16位的AD数值,也就是说陀螺仪输出范围是 -32768–+32768,我们设置不同的满量程范围,也就导致不同的灵敏度。比如我们将满量程范围设置为±2000dps,那么此时陀螺仪的灵敏度:65536/4000=16.384LSB/°/s
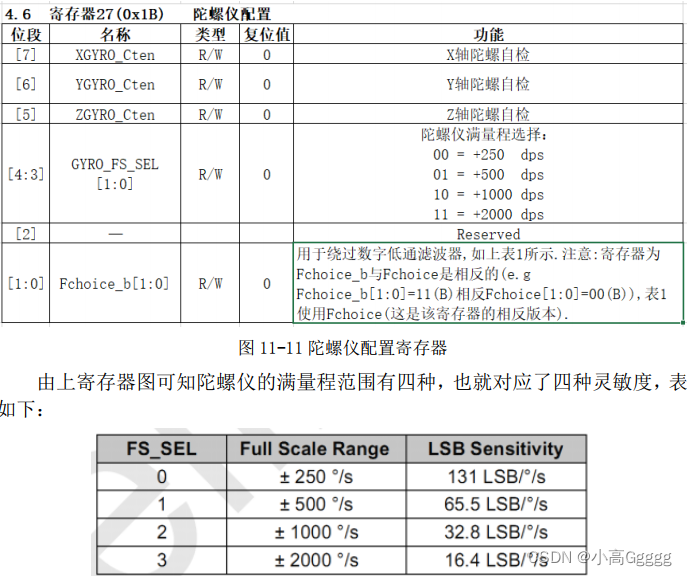
我们这里选择±2000dps,然后还要注意的是 Fchoice_b[1:0]的功能,**Fchoice_b[1:0]和配置寄存器里的 DLPF_CFG[2:0]共同决定陀螺仪是否使用硬件低通滤波器。**其中,Fchoice_b[1:0]和Fchoice[1:0]是相对立的。通俗Fchoice_b[1:0]=00时;Fchoice[1:0]=1190;这里我们往陀螺仪配置寄存器里写的是0x18。(0001 1000)第4,5位置11,选择了2000dps。
下面我们配置加速度计的满量程范围,我们知道MPU9250采集的加速度量是一个16位AD数值,也就是说加速度计输出范围是-32768——+32768,我们设置不同的满量程范围,也就导致不同的灵敏度。比如我们将满量程范围设置为±8g,那么此时加速度计的灵敏度:65536/16=4096LSB/g
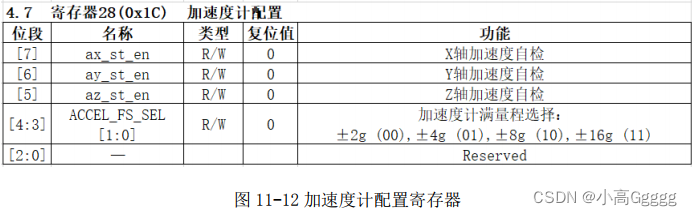
由上寄存器可知加速度计的满量程范围有四种,也就对应了四种灵敏度,表如下:
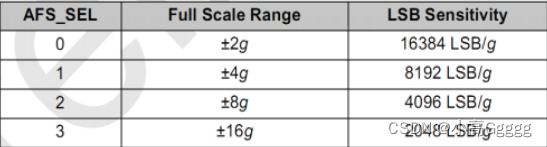
这里我们选择±8G,其他位也不用管也就是写入值为0X08。加速度计的输出硬件滤波器配置看下面加速度计配置2寄存器的 accel_fchoice_b[3]和A_DLPFCFG[2:0]
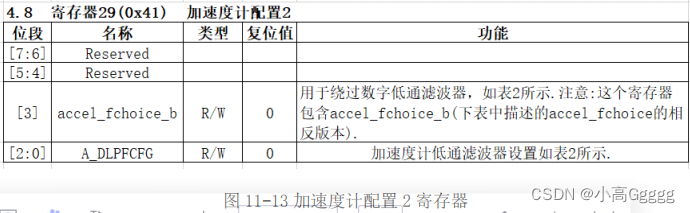
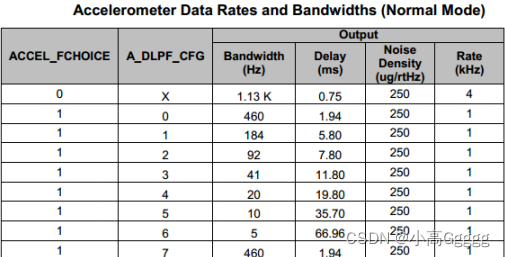
由上表和加速度计配置2寄存器的描述可知,配置accel_fchoice_b[3]=0和A_DLPFCFG=100 就将加速度计输出滤波设置成20Hz。因此我们需要将加速度计配置2的值设置为0x04.(倒数第四行,accel_fchoice_b与accel_fchoice相反,accel_fchoice_b[3]=0所以accel_fchoice=1)
下面来看看配置寄存器:
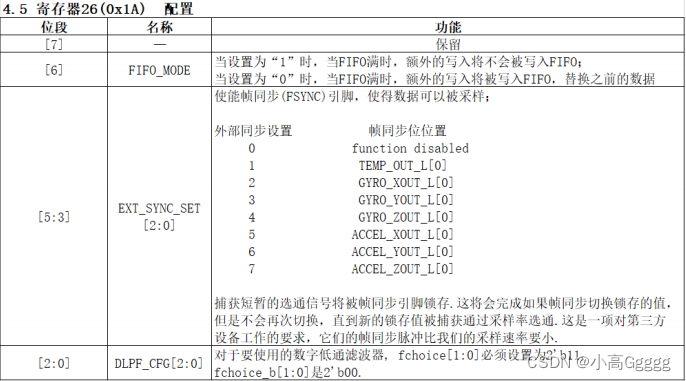
配置寄存器我们这里只用来配置与陀螺仪寄存器的 Fchoice_b[1:0]配合设置陀螺仪输出的低通滤波器的宽带,带宽配置见下表:
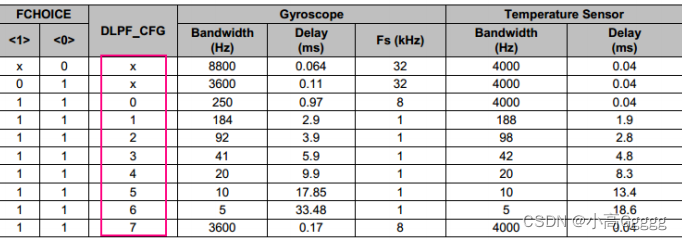
结合上表和配置寄存器可知,如果我们将陀螺仪输出低通滤波器的宽带为92,那么我们就需要将陀螺仪寄存器的Fchoice_b[1:0]置为00,则Fchoice=11;配置寄存器的DLPF_CRG[2:0]=010;其他位没用到,因此写入0x02就可以。
根据上面寄存器的讲解,我们MPU9250初始化代码如下:
void MPU9250_Init(void)
{
MPU9250_Check();//检查MPU9250是否连接
MPU9250_WriteByte(MPU9250_RA_PWR_MGMT_1,0X80);//复位MPU9250
delay_ms(100);
MPU9250_WriteByte(MPU9250_RA_PWR_MGMT_1,0X01);//唤醒MPU9250,并选择PLL为时钟源
MPU9250_WriteByte(MPU9250_RA_PWR_MGMT_2,0X00);//设置输出三轴陀螺仪与加速度仪数据
MPU9250_WriteByte(MPU9250_RA_INT_ENABLE,0X00);//禁止中断
MPU9250_WriteByte(MPU9250_RA_SMPLRT_DIV,0X00);//采样分频(采样频率=陀螺仪输出频率/(1+DIV),采样频率1000Hz)
MPU9250_WriteByte(MPU9250_RA_GYRO_CONFIG,0X18);//陀螺仪满量程+-2000°/s (最低分辨率=2^16/4000=16.4LSB/°/s)
MPU9250_WriteByte(MPU9250_RA_ACCEL_CONFIG,0X08);//加速度满量程+-4g (最低分辨率=2^16/8g=8196LSB/g)
MPU9250_WriteByte(MPU9250_RA_ACCEL_CONFIG_2,0X04);//设置加速度滤波为DLPF=20Hz
MPU9250_WriteByte(MPU9250_RA_CONFIG,MPU9250_DLPF_BW_98);//设置陀螺仪的输出为1KHz,DLPF=98HZ
MPU9250_WriteByte(MPU9250_RA_INT_PIN_CFG,0X02);//MPU 可直接访问MPU9250辅助IIC
}
MPU9250获取原始数据
上面MPU250的初始化已经完成,下面我们直接读3轴加速度,3轴陀螺仪数据。
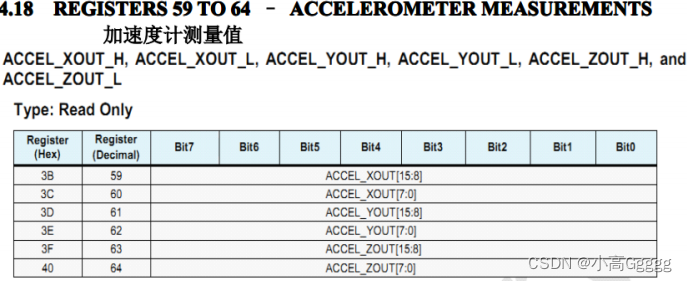
如上图所示三轴加速度输出数值分别保存在 ACCEL_XOUT_H,ACCEL_XOUT_L,ACCEL_YOUT_H,ACCEL_YOUT_L,ACCEL_ZOUT_H,ACCEL_ZOUT_L这六个寄存器中,并且每一个轴的加速度数值占两个寄存器。例如:X轴加速度数值有16位,高八位在ACCEL_XOUT_H中,低八位在ACCEL_XOUT_L中,所以读取这些寄存器值后还需要将其组合成相应的数值。
代码如下:
void PU9250_AccRead(int16_t *accData)
{
uint8_t buf[6];
MPU9250_ReadMultBytes(MPU9250_RA_ACCEL_XOUT_H,6,buf);
accData[0] = (int16_t)((buf[0]<<8)|buf[1]);
accData[1] = (int16_t)((buf[0]<<8)|buf[3]);
accData[2] = (int16_t)((buf[0]<<8)|buf[5]);
}
陀螺仪数据寄存器如下:
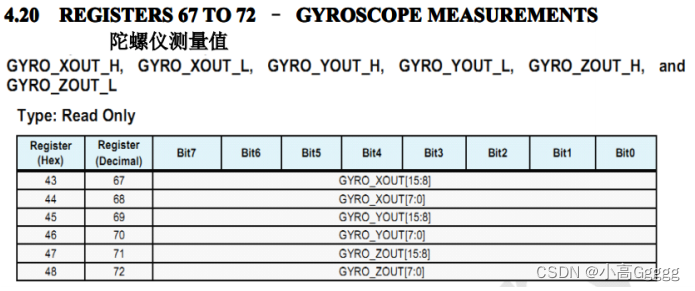
原理同上。
代码如下:
void MPU9250_GyroRead(int16_t *gyroData)
{
uint8_t buf[6];
MPU9250_Read_mULTbYTES(MPU9250_RA_GYRO_XOUT_H,buf);
gyroData[0] = (int16_t)((buf[0]<<8)|buf[1]);
gyroData[1] = (int16_t)((buf[2]<<8)|buf[3]);
gyroData[2] = (int16_t)((buf[4]<<8)|buf[5]);
}
温度代码读取如下:
void MPU9250_TemRead(float *tempdata)
{
uint0_t buf[2];
short data;
MPU9250_ReadMultBytes(MPU9250_RA_TEMP_OUT_H,2,buf);
data = (int16_t)((buf[0]<<8)|buf[1]);
*tempdata = (data/333.87)+21;
}
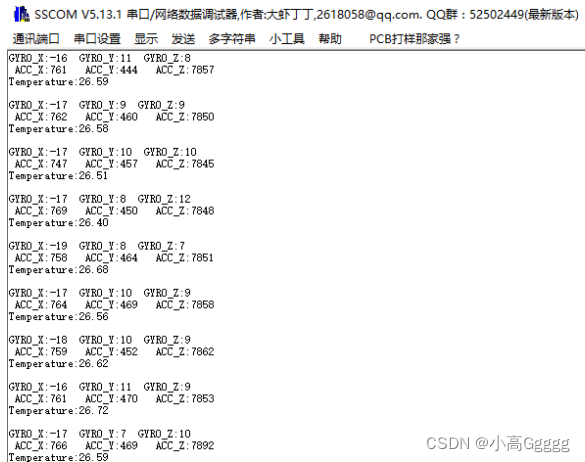
在最后main()中分别调用这三个函数,读取3轴加速度,3轴陀螺仪,温度数据的数据并打印。
while(1)
{
MPU9250_GyroRead(GYRO);
MPU9250_AccRead(ACC);
MPU9250_TempRead(&Temperature);
printf("GYRO_X:%d GYRO_Y:%d GYRO_Z:%d\r\n",GYRO[0],GYRO[1],GYRO[2]);
printf("ACC_X:%d ACC_Y:%d ACC_Z:%d\r\n",ACC[0],ACC[1],ACC[2]);
printf("Temperature:&0.2f\r\n\r\n",Temperature);
DELAY_MS(500);
}
结果如图:















 1246
1246











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









