







一、有向无环图
即DAG(Directed Acycline Graph),为图中无环的有向图。
1.判断
①深度优先搜索:
可以使用DFS,找出是否存在环:从某个顶点
v
0
v_0
v0出发,进行DFS,若存在一条从顶点到已访问顶点
v
v
v的回边(即遍历到同一个点两次),则有向图中存在环。
②拓补排序
2.应用
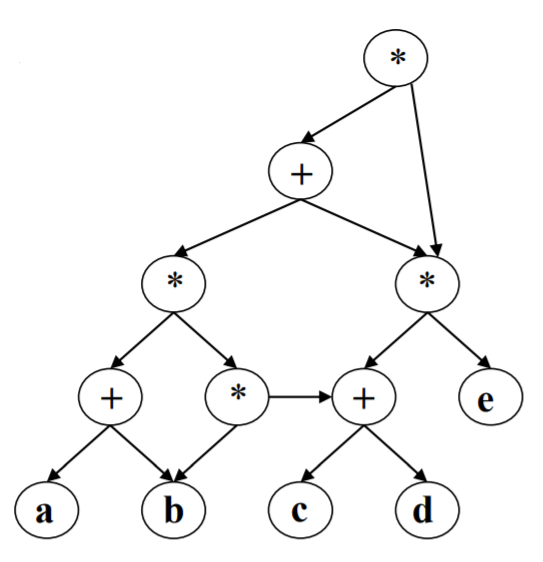
①表达式共享
可用于表示表达式的共享,相比于二叉树的表示形式更节省空间:
二叉树形式:

有向无环图形式:
②AOV网
AOV(Activity On Vertex Network)网,对工程活动加以抽象,图中顶点表示活动,有向边表示活动之间优先关系,这样的有向图称AOV网。AOV网中不能有环,否则,某项活动能否进行是以自生是否完成作为前提条件的。
可对AOV网进行拓补排序,以求得各子活动之间的优先关系。
二、拓补排序
-
拓补有序序列:设 G = V , E G={V,E} G=V,E是为n阶有向图, V V V中的顶点序列 v 1 , v 2 , . . . , v n v_1,v_2,...,v_n v1,v2,...,vn,满足:若从顶点 v 0 v_0 v0到 v j v_j vj有这样一条路径:顶点序列中 v 0 v_0 v0必在 v j v_j vj之前,这样的顶点序列称为一个拓补有序序列。
-
拓补排序:拓补排序为对一个有向图构造拓补有序序列的过程;构造会有两个结果:
- 若全部顶点都被输出,则说明DAG不存在环(回路)。
- 若有的顶点没有被输出,则DAG存在环(回路)。
1.拓补排序算法
- 在有向图中选一个没有前驱的顶点作为始点
- 从图中删除该点与所有以它为尾的弧(改弧的弧头顶点入度减1)
- 重复①②,直到图中不再有没有前驱(入度为0)的顶点为止
如何选择入度为0的顶点:
使用栈或队列保存入度为0的顶点,新增InDegree记录各顶点的入度。
2.数据结构的实现
- 邻接表:
由于拓补排序过程中需要始终查找入度为0的顶点,故需为每个顶点结构新增一个入度域InDegree;且每遍历一个顶点需要对以其为尾的弧进行遍历,找到所有邻接点,再将他们的入度域减一。其间涉及大量链表遍历,显然使用邻接矩阵更为方便。
实现:
//数据结构
#define MAXVERTEXNUM 100
struct ArcNode{
int AdjVex;
ArcNode *NextArc;
};
struct VexNode{
int InDegree;
char Data;
ArcNode *firstArc;
};
class Graph{
int VertexNum;
VexNode *AdjList;
}
//具体算法
void TopologicalSort(){
stack<VexNode> S; //存放入度为零的顶点
VexNode v;
ArcNode* w;
int i,count;
for(int i=0;i<VertexNum;i++)
if(!AdjList[i].InDegree) S.push(AdjList[i]); //入度为零的顶点入栈
count=0; //计数器置0
while(!S.empty()){
v=S.top();
S.pop();
count++;
cout<<v.Data<<" ";
for(w=v.fristArc;w;w=w->NextArc){
AdjList[w->AdjVex].InDegree--;
if(!AdjList[w->AdjVex].InDegree)
S.push(AdjList[w->AdjVex];)
}
}
if(cout<VertexNum) cout<<"图中含有回路";
cout<<endl;
}
2. 邻接矩阵:
①逐列扫描矩阵,找到入度为0的顶点
v
v
v
②输出顶点
v
v
v,标识
v
v
v已访问
③将矩阵第
v
v
v行全部清0(删除所有以该顶点为尾的弧,且剪掉对应弧头顶点的度数)
④重复上述不走,直到没有入度为0的顶点
以上方法矩阵最终所有的元素不一定全为0。
三、关键路径
对于工程活动,人们不仅关心工程能否顺利完成(对AOV网进行拓补排序),还关心:
- 估算整个工程完成所需最短时间。
- 影响工程的关键活动是什么,那些活动的延期将会影响整个工程的进度,加速这些活动是否会提高整个工程的效率。
1.参数介绍
1.AOE网(Activity On Edge NetWork):以顶点表示事件(Event),以有向边表示活动,边上的权值为该活动持续的事件,这样的有向图称为AOE网。利用AOE网可完成以上工作。
- 只有某顶点事件发生后,从该顶点出发的各有向边活动才能开始
- 只有进入某顶点的所有边的各顶点所代表的活动都已结束,该顶点事件才能发生。
- 在AOE网中,时间不能自己完成,而是由活动驱动,随活动的完成而完成。
2.关键路径:
- 把AOE网中某路径上各个活动所持续时间之和称为路径长度。
- 从源点到汇点的最大程度的路径称为关键路径,其长度为工程完成的最短时间。关键路径可能不唯一。
- 关键路径上的活动称为关键活动,关键活动是影响整个工程时间的关键所在。
- 顶点:工程需要完成的第一个事件
- 汇点:工程需要完成的最后一个事件
介绍关键路径算法之前,先介绍几个重要参数:
- V e ( j ) V_e(j) Ve(j):表示事件 j j j的最早发生事件,即从源点到顶点 j j j的最长路径长度(只有将所有所需的事件都完成了 j j j才能进行);
- V l ( k ) V_l(k) Vl(k):表示事件 k k k的最晚发生时间,即从汇点到顶点 k k k的最短路径长度(此时事件 k k k再不发生则会影响工程的进度);
- e ( a i ) e(a_i) e(ai):表示活动 a i a_i ai的最早开始时间;
- i ( a i ) i(a_i) i(ai):在不影响进度的前提下,活动 a i a_i ai的最晚开始时间;
- d u t ( < j , k > ) dut(<j,k>) dut(<j,k>):弧 < j , k > <j,k> <j,k>所对应活动的持续时间;
其中 i ( a i ) − e ( a i ) i(a_i)-e(a_i) i(ai)−e(ai)表示活动 a i a_i ai的时间余量,即可以推迟多久执行而不影响工程的进度;若 ( a i ) − e ( a i ) = 0 (a_i)-e(a_i)=0 (ai)−e(ai)=0,则表示活动 a i a_i ai为关键活动,即该活动在关键路径上;于是求关键路径的问题就转换成了求各活动的 e ( a i ) e(a_i) e(ai)与 l ( a i ) l(a_i) l(ai),求出所有关键活动后可得关键路径。
各参数间的关系:
- e ( a i ) = V e ( j ) e(a_i)=V_e(j) e(ai)=Ve(j),即活动 a i a_i ai的弧尾时间 j j j的最早发生时间,当事件 j j j发生了,活动 a i a_i ai最早可以现在开始;
- l ( a i ) = V l ( k ) − d u t ( < j , k > ) l(a_i)=V_l(k)-dut(<j,k>) l(ai)=Vl(k)−dut(<j,k>),即活动 a i a_i ai的弧头事件 k k k的最晚发生时间减去活动 a i a_i ai的持续时间——此时活动 a i a_i ai再不发生,则会导致事件 k k k推迟,从而事件 k k k发生时间晚于最晚时间,导致工程延期。
于是关键路径的求解又转换为求各顶点最早、最晚发生时间。
各参数的值
1.事件最早开始时间
V
e
(
j
)
=
{
0
,
若
j
为
源
点
M
a
x
{
V
e
(
x
)
+
d
u
t
(
<
x
,
j
>
∣
<
x
.
j
>
为
图
中
的
弧
)
}
V_e(j)=\begin{cases} 0,若j为源点\\ Max\{V_e(x)+dut(<x,j>|<x.j>为图中的弧)\}\\ \end{cases}
Ve(j)={0,若j为源点Max{Ve(x)+dut(<x,j>∣<x.j>为图中的弧)}
除源点外,只有进入顶点
j
j
j的所有弧所代表的活动全部结束后,事件
j
j
j才能发生。即只有
j
j
j的所有前驱事件
x
x
x的最早发生时间
V
e
(
x
)
V_e(x)
Ve(x)计算出来后,才能计算
V
e
(
j
)
V_e(j)
Ve(j)。
2.事件最晚开始时间
V
l
(
k
)
=
{
V
e
(
n
−
1
)
,
若
k
是
汇
点
M
i
n
{
V
l
(
y
)
−
d
u
t
(
<
k
,
y
>
∣
<
k
,
y
>
为
图
中
的
弧
)
}
V_l(k)=\begin{cases} V_e(n-1),若k是汇点\\ Min\{V_l(y)-dut(<k,y>|<k,y>为图中的弧)\} \end{cases}
Vl(k)={Ve(n−1),若k是汇点Min{Vl(y)−dut(<k,y>∣<k,y>为图中的弧)}
只有
k
k
k的所有后继事件
y
y
y的最晚发生时间
V
l
(
y
)
V_l(y)
Vl(y)计算出来后,才能计算
V
l
(
k
)
V_l(k)
Vl(k),此时事件
k
k
k再不发生,则会延误后续的事件。
2.具体算法
- 利用拓补排序求出AOE网的一个拓补序列
- 从拓补序列的源点开始,令 V e [ 0 ] = 0 V_e[0]=0 Ve[0]=0,按拓补顺序依次计算每个事件的最早发生时间 V e ( j ) V_e(j) Ve(j);
- 从拓补序列的汇点开始,令 V l [ n ] = V e [ n − 1 ] V_l[n]=V_e[n-1] Vl[n]=Ve[n−1](终点一定在关键路径上),按逆拓补顺序依次计算每个事件的最晚发生时间 V l ( j ) V_l(j) Vl(j);
- 计算每个活动 a i a_i ai的最早开始时间 e ( a i ) e(a_i) e(ai)和最晚开始时间 l ( a i ) l(a_i) l(ai),若 e ( a i ) = l ( a i ) e(a_i)=l(a_i) e(ai)=l(ai),则该活动 a i a_i ai为关键活动,该弧所依附的顶点序列为关键路径,关键路径上的权值之和为完成工程所需的最短时间。
- 只有缩短关键活动时间才能缩短整个工程工期
- 一个项目可以有多个、并行的关键路径。若一个关键活动不在所有的关键路径上,减少它并不能减少工期。















 1555
1555











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









