






 本文详细介绍了NEO-M9L模块的电源配置,包括VCC、V_BCKP和V_USB的使用,强调了电源稳定性和低噪声的重要性。同时,讨论了天线设计,推荐了无源和有源天线的布局与保护措施。此外,还涵盖了ESD保护和PCB布局的最佳实践,以确保模块的稳定运行和性能。
本文详细介绍了NEO-M9L模块的电源配置,包括VCC、V_BCKP和V_USB的使用,强调了电源稳定性和低噪声的重要性。同时,讨论了天线设计,推荐了无源和有源天线的布局与保护措施。此外,还涵盖了ESD保护和PCB布局的最佳实践,以确保模块的稳定运行和性能。
4 设计
本节提供的信息有助于成功进行集成NEO-M9L的原理图和PCB设计。
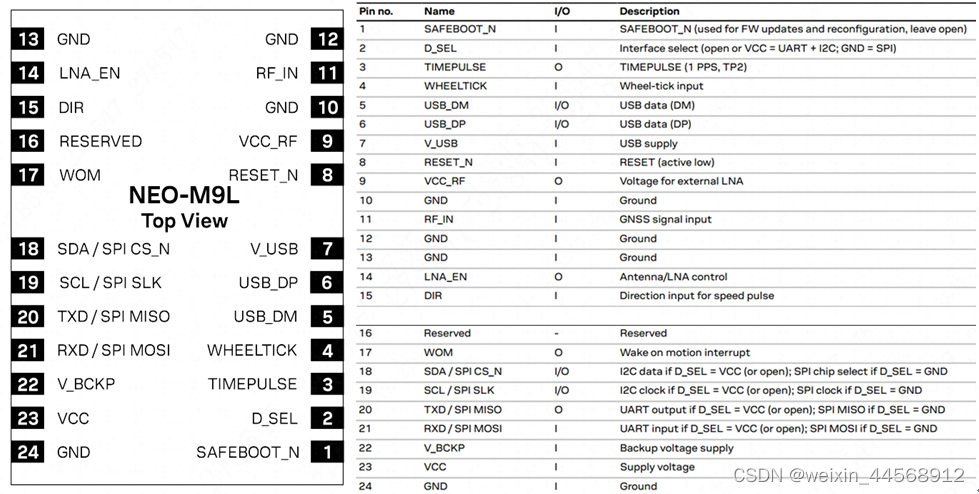
4.1 引脚定义
NEO-M9L模块的引脚分配如图26所示。PIO的定义配置如表26所示。
4.2电源
u-blox NEO-M9L模块有三个电源引脚:VCC、V_BCKP和V_USB
4.2.1 VCC:主电源电压
VCC引脚连接到主电源电压。在操作过程中,模块汲取的电流可能会变化几个数量级。因此,电源电路能够在短时间内支持峰值功率是很重要的(有关规格,请参阅datasheet)
该模块集成了DC/DC转换器,可降低功耗
- 当从备份模式切换到正常操作或启动时,u-blox NEO-M9L模块必须为核心域中的内部电容器充电。在某些情况下,这可能会导致大量的电流消耗。对于使用备份模式的低功率应用,重要的是模块输入处的电源或低ESR电容器可以提供此电流/电荷。
- 为了降低通电期间的峰值电流,用户可以使用具有内置限流器的LDO
- 不要添加任何大于0.2的串联电阻Ω VCC电源,因为它将由于动态电流条件而产生输入电压噪声。
- 对于NEO-M9L模块,设备必须由符合标准IEC 60950-1第2.5条的外部限功率电源供电。
-
- V_BCKP:备用电源电压
-
V_BCKP引脚用于提供电源,以在移除VCC时维持实时时钟(RTC)和电池备份RAM(BBR
V_BCKP可以由电池供电。如果在VCC断电期间提供V_BCKP,则接收器可能能够执行热启动或热启动。特别是如果RTC和BBR内容仍然是当前的,例如,在短暂的VCC断电之后。融合滤波器数据也存储在BBR中,NEO-M9L可以在融合模式下重新启动。
如果未提供V_BCKP,模块将在通电时执行冷启动。此外,还需要重新校准传感器。
如果主机连接到NEO-M9L,则可以使用UBX-UPD-OS功能部分模拟V_BCKP。BBR数据可以保存到主机,并在启动时恢复。有关更多信息,请参阅适用的接口说明。
- 避免V_BCKP线上的高电阻:在从主电源切换到备用电源的过程中,短电流调整峰值可能会导致引脚上的高电压降,并可能出现故障。
- 如果没有备用电源电压,将V_BCKP引脚连接到VCC。
- 硬件备份模式允许包括UART和其他接口在内的所有I/O浮动或高阻态连接(移除VCC时提供V_BCKP)。请参阅“接口”部分。
实时时钟(RTC)
实时时钟(RTC)由使用RTC晶体的32kHz振荡器驱动。如果在电池连接到V_BCKP时移除VCC,则大部分接收器将关闭,使RTC和BBR通电。这种操作模式被称为硬件备份模式,它可以保持时间并保存所有相关数据,以便进行热启动或热启动。
-
-
- NEO-M9L电源
-
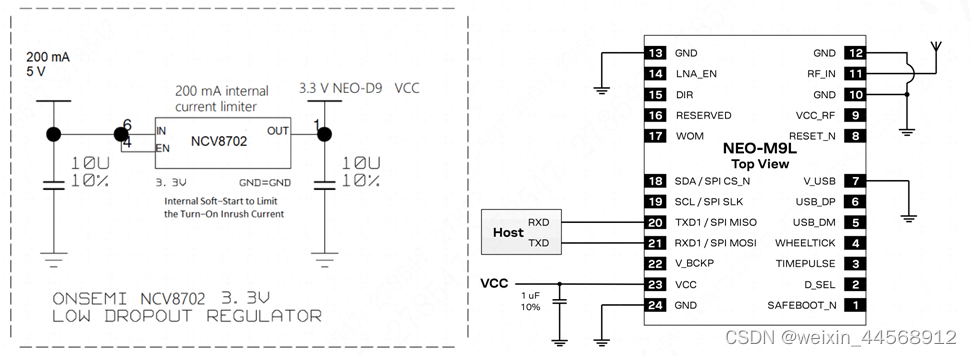
NEO-M9L需要低噪声、低电压降和通常为3.3 V的极低源阻抗电源。从LDO到模块VCC引脚不应使用电感器或铁氧体磁珠。为模块提供LDO的电源需要考虑峰值电流。由5V供电的电源如下图1所示。此示例电路仅用于模块电源
-
- NEO-M9L最小设计,如上图2所示
对于近地天体-M9L全球导航卫星系统模块的最小设计,应考虑以下功能和引脚:
•将电源连接到VCC和V_BCKP。
•如果需要热启动或热启动操作,请将备用电池连接到V_BCKP。
•如果未使用USB,则将V_USB接地。
•确保与近地天体-M9L全球导航卫星系统模块的所有接地引脚实现最佳接地连接。
•选择所需的串行通信接口(UART、USB、SPI或I2C),并连接为您的应用程序提供合适的引脚。如果使用SPI,则必须将D_SEL接地。
•SAFEBOOT_N引脚可用于启用未来的固件更新
-
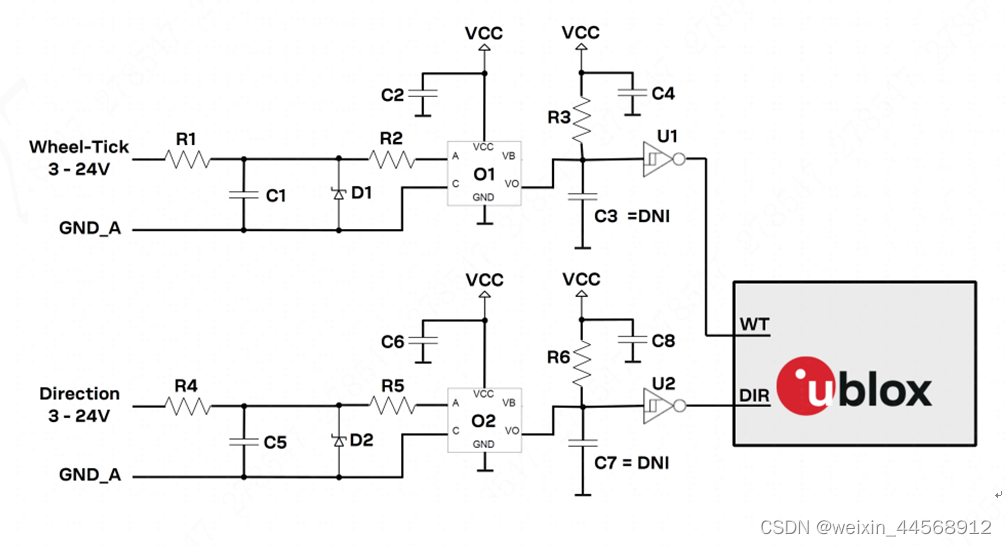
- WT和DIR接口示例
本节展示了WT和DIR引脚接口的示例设计。
-
- Antenna
全球导航卫星系统信号的信号电平非常低,范围从-130 dBm到大约-167 dBm。这对于全球导航卫星系统接收器性能来说已经是一个相当具有挑战性的参数。除了带外干扰之外,诸如GSM、CDMA、WCDMA、LTE、Wi-Fi或蓝牙无线系统具有高得多的信号电平。这使得接收器布局更具挑战性
全球导航卫星系统天线和相关前端射频信号路径组件的性能对全球导航卫星体系整体应用的性能具有决定性影响。
NEO-M9L具有内部直流块和50Ω阻抗匹配,可用于GNSS信号输入,因此不需要将这些组件添加到RF路径中。
天线必须具有足够的带宽,以接收所有需要的全球导航卫星系统星座1,并在全球导航卫星卫星系统频率下具有50Ω的阻抗
4.5.1带无源天线的天线设计
使用无源天线的设计需要注意RF部分的布局。通常,无源天线位于电子元件附近;因此,应注意减少可能干扰天线性能的电噪声。天线必须具有足够的带宽来接收所有需要的全球导航卫星系统星座。此外,天线应具有合适的接地平面,以实现良好的性能。无源天线不需要DC偏置电压,并且可以直接连接到RF输入引脚RF_IN。
4.5.2带外部LNA或有源天线的天线设计
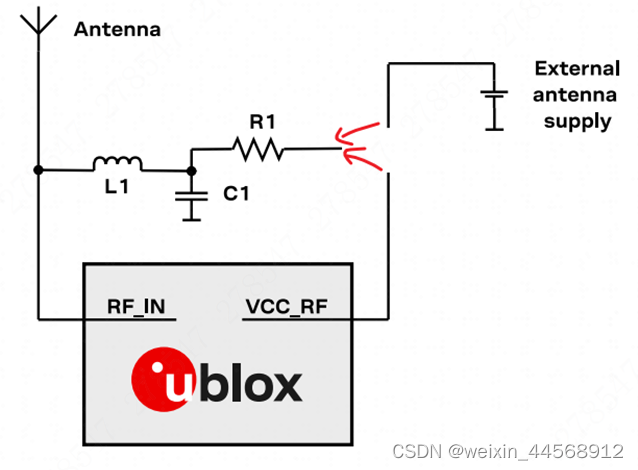
如果天线增益较低或天线必须远离模块放置,则无源天线可能不足。对于这种设计,NEO-M9L模块支持控制额外的外部LNA或有源天线。天线控制信号引脚LNA_EN为有效高电平,以在接收器需要GNSS信号时启用外部LNA或有源天线。如果需要,VCC_RF输出引脚可用于向这些外部组件提供滤波后的直流偏置电压。在这种情况下,NEO-M9L模块的电源电压必须与外部组件的工作电压相匹配(例如3.3 V)。如果VCC_RF电压与有源天线的电源电压不匹配,请使用经过滤波的外部电源。
外部LNA或具有集成LNA的有源天线需要电源,该电源为系统的功耗预算贡献通常为5至20mA的额外电流。
用于全球导航卫星系统应用的有源天线通常通过射频电缆上的直流偏压供电。如图31所示,一个简单的偏置-T可以用于将该直流电流添加到RF信号线。偏置电压可以由模块的VCC_RF引脚提供,也可以由外部天线电源提供。
设计建议:
•如果应用有一个具有足够增益的无源天线,但天线位于远离模块的位置,则必须在无源天线附近放置一个额外的外部LNA。
•如果应用程序需要有源天线,建议使用符合u-blox规范的OEM有源天线模块。
•天线需要合适的接地平面才能获得良好的性能。
•有源天线可能具有较强的增益。有关最大外部增益,请参阅相关文件中的数据表[1]。
•需要一个串联限流电阻器,以防止短路破坏偏置-t电感器。
•如果NEO-M9L模块的VCC_RF电压与有源天线的电源电压不匹配,请使用滤波的外部电源,而不是VCC_RF。
•天线电路应包括滤波,以确保对附近发射机接口提供足够的保护。在设计靠近蜂窝或Wi-Fi发射天线的天线电路时要小心。
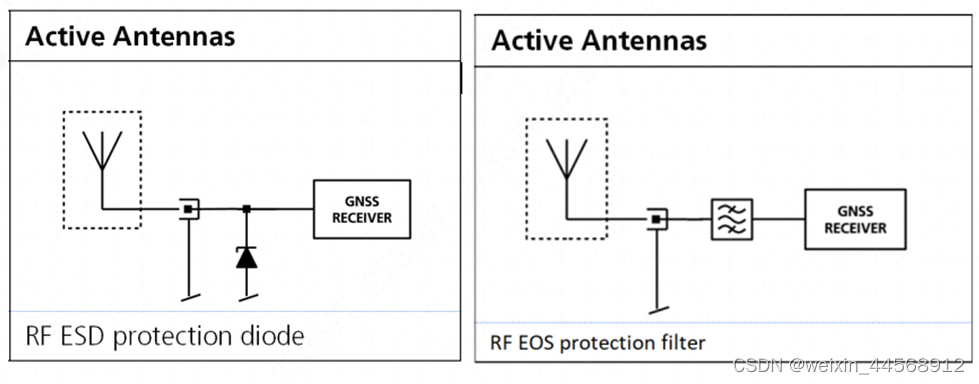
•ESD保护二极管也应连接到输入端。
建议使用有源限流。如果不使用有源限流,请考虑以下要点:
- 必须选择bias-t电感和限流电阻器,使其在天线馈电短路的情况下可靠。在模块通过VCC_RF提供电压的情况下,将需要一个更高值的电阻器来确保模块供电电感器得到保护。短路条件下,模块电源电压下的电流应限制在150 mA以下。例如,在3.3 V的模块电源下,需要19Ω或更大的值来将短路电流限制在150 mA。bias-t电感的直流电阻假设为1-2Ω,模块内部馈电电感器假设为2Ω。
- 需要根据电源电压和短路电流考虑电阻器和电感器的功耗
注意:已使用主动式全球导航卫星系统天线B3G02G-S3-01-A评估了NEO-M9L是否符合无线电设备指令(RED)2014/53/EU。模块应使用类似的天线或射频前端特性。
-
- EOS/ESD预防措施
为了避免在生产过程中或现场造成过应力损坏,必须遵守严格的EOS/ESD/EMI处理和保护措施。
为了防止接收器RF_IN处的过度应力损坏,切勿超过适用数据表[1]中规定的最大输入功率。
将全球导航卫星系统接收器集成到无线系统中时,应特别注意电磁和电压敏感性问题。无线系统包括可产生静电放电(ESD)、电过应力(EOS)和电磁干扰(EMI)的组件。CMOS器件对这种影响更敏感,因为它们的失效机制是由施加的电压决定的,而双极半导体更容易受到热应力的影响。以下设计指南有助于设计稳健但具有成本效益的解决方案。
4.6.1 ESD保护措施
全球导航卫星系统接收器对静电放电(ESD)很敏感。搬运时需要采取特殊预防措施。大多数由ESD引起的缺陷可以通过遵守严格的ESD保护规则进行生产和处理来防止。在实施无源天线贴片或外部天线连接点时,如下图所示的额外ESD措施也可以避免现场故障。
-
-
- EOS 保护措施
-
电气超应力(EOS)通常描述最大输入功率超过最大规定额定值的情况。如果射频发射器靠近全球导航卫星系统接收器或其天线,则可能发生EOS故障。EOS会对芯片结构造成损坏。如果RF_IN被EOS损坏,则很难确定芯片结构是否被ESD或EOS损坏。
对于任何将无线通信收发器(如GSM、GPRS)和GNSS组合在同一设计或附近的设计,建议采用上图所示的EOS保护措施。
-
-
- Safety保护措施
-
NEO-M9L必须由符合IEC 60950-1标准第2.5条的外部有限电源供电。除了外部有限电源外,只有分离或安全超低电压(SELV)电路才能连接到模块,包括接口和天线。有关SELV电路的更多信息,请参阅安全标准IEC 60950-1中的第2.2节
4.7输入/输出线路上的电磁干扰
长度大于大约3mm的任何I/O信号线都可以用作天线,并且可以拾取任意RF信号,将它们作为噪声传输到接收器中。这特别适用于非屏蔽线,其中对应的GND层是远程的或完全缺失的,以及靠近印刷电路板边缘的线。
例如,如果蜂窝信号辐射到未屏蔽的高阻抗线路中,就有可能产生伏特量级的噪声,不仅会使接收机工作失真,还会永久损坏接收机。另一种类型的干扰可能是由PIO引脚处产生的噪声引起的,该噪声从非屏蔽I/O线发射。当这种噪声被耦合到GNSS天线中时,接收机性能可能会降低。
当RF发射装置被放置在GNSS接收器旁边时和/或为了将由于自干扰引起的EMI退化的风险降至最低时,EMI保护措施特别有用。为了防止电磁干扰,具有稳健接地概念的适当布局至关重要。
预期用途:为了减轻无线电设备在电磁兼容干扰下的性能退化,系统集成应采用适当的电磁兼容设计实践,信号和电源端口上不包含超过三米的电缆
4.7.1关于干扰问题的一般说明
在天线处接收到的GNSS信号功率非常低。在标称接收信号强度(-128dBm)下,它低于-111dBm的热噪声本底。由于这一事实,全球导航卫星系统接收器容易受到附近任何类型射频源的干扰。可以区分两种情况:
带外干扰:通常,任何类型的无线通信系统(如LTE、GSM、CDMA、3G、WLAN、蓝牙等)都可能在靠近全球导航卫星系统接收天线的地方发射其指定的最大发射功率,特别是如果这种系统与全球导航卫星系统接收器集成在一起。即使在合理的天线选择性下,破坏性功率电平也可能达到GNSS接收器的RF输入。此外,较大的信号干扰可能在GNSS接收机前端内部产生互调产物,该互调产物落入GNSS频带并导致带内干扰。
带内干扰:尽管根据无线电通信标准,全球导航卫星系统波段不受有意的射频信号源的影响,但许多设备向全球导航卫星卫星系统波段发射的射频功率远高于全球导航卫星信号本身。一个原因是1GHz以上的频带在EMI方面没有得到很好的调节,并且即使允许,信号电平也远高于GNSS信号功率。值得注意的是,所有类型的数字设备,如PC、数码相机、LCD屏幕等,都倾向于发射高达几GHz的宽频谱。此外,无线发射机可能会产生落入全球导航卫星系统波段的杂散发射。
例如,GSM使用高达2 W(+33 dBm)的功率电平。在GNSS接收器的RF输入处的绝对最大功率输入可以是+15dBm。GSM规范允许GSM发射机的杂散发射高达+36 dBm,而GNSS信号小于-128 dBm。通过简单地比较这些数字,显然在GNSS接收器的任何设计中都必须认真考虑干扰问题。不同的设计目标可以通过不同的实现方式来实现:
•主要的重点是防止由于大的输入信号而损坏接收器。这里,干扰条件下的GNSS性能并不重要,并且允许对信号进行抑制。仅观察RF输入路径中所有组件的最大RF额定功率就足够。
•即使在干扰条件下,也必须保证全球导航卫星系统的性能。在这种情况下,不仅必须观察接收器RF路径中的组件的最大额定功率。此外,必须分析增益压缩、NF退化(脱敏)和互调等非线性效应。
具有诸如GSM之类的低占空比的脉冲干扰可能由于高峰值功率电平而具有破坏性。
4.7.2带内干扰抑制
在带内干扰的情况下,信号频率非常接近GNSS频率。这种干扰信号通常是由来自显示器、微控制器操作、总线系统等的谐波引起的。针对带内干扰的措施包括:
•在设计中保持良好的接地概念
•屏蔽
•布局优化
•噪声源的低通滤波,例如数字信号线
•全球导航卫星系统天线的远程放置,远离噪声源
•在天线前添加LTE、CDMA、GSM、WCDMA、BT带通滤波器
4.7.3带外干扰
带外干扰是由不同于全球导航卫星系统载波频率的信号频率引起的。主要来源是无线通信系统,如LTE、GSM、CDMA、WCDMA、Wi-Fi、BT等。
针对带外干扰的措施包括在设计中保持良好的接地概念,并在接收器的天线输入线中添加GNSS带通滤波器。对于GSM应用,如典型的手机设计,通过仔细放置天线可以达到约20 dB的隔离。如果这还不够,则需要在GNSS接收机输入上附加SAW滤波器来阻挡剩余的GSM发射机能量。
-
- pcb布局设计
本节详细介绍了近地天体-M9L模块的布局和放置要求。
4.8.1 摆放
地球表面的全球导航卫星系统信号低于热噪声本底。实现最大GNSS性能的一个非常重要的因素是将接收器在PCB上放置的位置。所使用的放置可能会影响从天线到接收器输入的RF信号损耗,并使干扰能够进入接收器链的敏感部分,包括天线本身。在定义全球导航卫星系统接收器布局时,天线相对于接收器的位置,以及接地、屏蔽和来自其他数字设备的干扰都是关键问题,需要非常仔细地考虑。
从天线到接收器输入的RF连接上的信号损耗必须尽可能地最小化。因此,与天线的连接必须尽可能短。
确保射频关键电路与系统板上的任何其他数字电路清晰分离。为了实现这一点,将接收器数字部分放置在更靠近系统PCB数字部分的位置,并将RF部分和天线放置在尽可能远离板上其他数字电路的位置。
应遵循正确的GND概念:RF部分不应受到流经其GND平面的嘈杂数字电源电流的影响。
4.8.2热管理
在设计过程中,不要将接收器放置在加热或冷却源附近。接收器振荡器对环境温度的突然变化很敏感,这可能对卫星信号跟踪产生不利影响。电源可以包括位于同一位置的电源设备、冷却风扇或通过PCB的热传导。在接收器中进行设计时,请考虑以下问题。
•接收器是否远离热源?
•接收器是否放置在远离空气冷却源的位置?
•接收器是否有盖子/外壳保护,以防止气流和快速环境温度变化的影响?
高温漂移和通风口会影响全球导航卫星系统的性能。为了获得最佳性能,请避免接收器附近出现高温漂移和通风口。
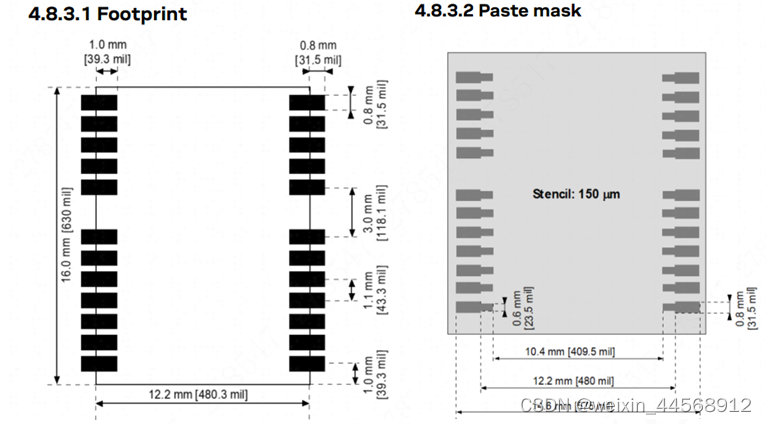
4.8.3封装、铜和助焊层
本节提供了NEO-M9L模块封装的铜和助焊层尺寸建议。
这些只是建议,而不是规范。精确的铜、焊料和焊膏掩模几何形状、距离、模版厚度和焊膏体积必须适应客户的特定生产工艺(如焊接等)。
4.8.4布局指导
所提供的布局指南降低了设计层面性能问题的风险
4.8.4.1射频跟踪
射频输入跟踪必须在中间L波段频率下工作
建议使用接地共面RF迹线,因为它通过足够的通孔到接地层来提供最大的噪声屏蔽。
重点关注以下布局准则:
•参考第2层的射频输入共面波导,匹配50Ω
•将射频输入匹配部件靠近RF_IN引脚。
•使用过孔在接地平面进行3D接地。
•射频输入迹线上不得出现短截线
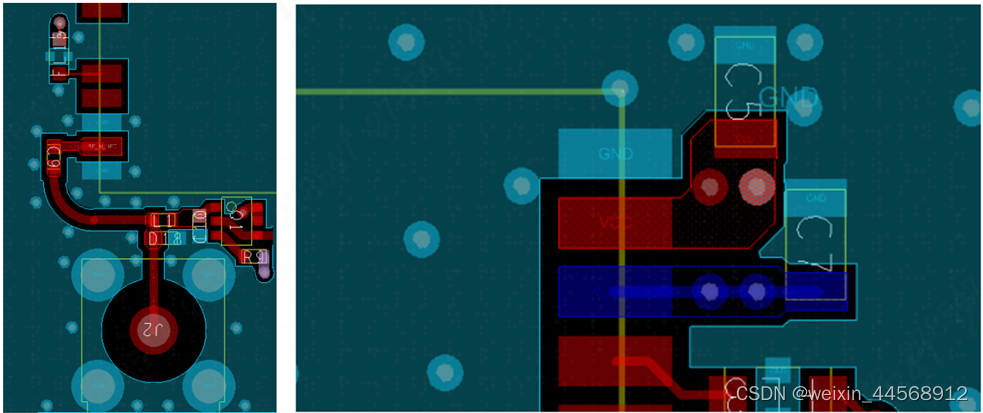
射频迹线必须沿迹线的整个长度由通孔屏蔽至接地,NEOM9L RF_IN焊盘应由通孔包围,如上面图3所示。顶层上的RF_IN迹线应参考合适的接地层。
4.8.4.2 VCC 焊盘
NEO-M9L模块的VCC焊盘需要具有尽可能低的阻抗,并具有通向PCB下功率层的大通孔。VCC焊盘需要一个大焊盘,并且去耦电容器必须放置得尽可能靠近。如上图所示。
4.9设计指导
4.9.1一般注意事项
检查电源要求和原理图
•电源电压是否在规定范围内且无噪声?
•如果未使用USB,请将V_USB引脚接地。
•对于USB设备:V_USB电压是否在指定范围内?
•建议为V_USB提供一个单独的LDO,该LDO由模块VCC启用。这是为了符合USB自供电规范。
•如果使用USB,V_USB引脚附近是否有1 uF电容器?这只适用于V_USB引脚。
•模块VCC引脚旁边是否有1 uF
•将NEO-M9L GNSS模块的峰值电流消耗与您的电源规格进行比较。
•全球导航卫星系统接收器需要稳定的电源。避免电源线(连接VCC的线路)中的串联电阻(小于0.2Ω),以最大限度地减少VCC上的电压纹波。有关电源要求的更多信息,请参阅设计章节中的NEOM9L电源部分。
•当未施加VCC时,允许所有I/O浮动/高阻抗(High-Z)。
4.9.2备用电池
检查备用电源要求和示意图:
•为了在断电(热启动、热启动)后获得最短的首次修复时间(TTFF),请确保将备用电池连接到V_BCKP。
•验证备用电池电源是否能够提供适用数据表中规定的备用电池电流。
•允许所有I/O,包括UART和其他接口,在硬件备份模式下浮动/高阻抗(电池备份连接VCC移除)。
4.9.3射频前端电路选项
信号处理链的第一阶段对接收机的整体性能至关重要
当采用RF输入连接器时,这可以为有害或破坏性的电信号提供传导路径。如果这是一个可能的因素,则应相应地保护射频输入。射频输入上的附加点:
•信号源(天线)的预期质量是多少?
•外部有源天线信号功率是多少?
•外部有源天线的带宽和滤波是多少?
•外部天线和任何可选滤波组件是否满足群延迟变化要求?
破坏性射频功率水平是否会达到射频输入?是否预计会受到无线发射机的干扰?
•这些信号的特性是什么(占空比、频率范围、功率范围、光谱纯度)?
•在干扰条件下,全球导航卫星系统的预期性能是什么?
是否存在射频输入暴露于过度ESD应力的风险?
•现场:用户可以碰到天线连接器吗?
•PCB/系统组件:是否存在静电部件(如贴片天线)可能通过射频输入放电的风险?
以下小节提供了几个解决上述各种问题的选项:
在一些应用中,例如蜂窝收发器,干扰信号可能超过RF_In输入的最大额定功率。为了避免设备损坏,必须使用外部输入保护。
在组装包含无源贴片天线的最终用户设备的过程中,当预充电天线焊接到GNSS接收器板时,在生产过程中可能会发生ESD放电。在这种情况下,必须在RF_In前面使用外部保护,以避免设备损坏
在组装和/或现场使用过程中,无法避免ESD放电。注意SAW滤波器容易受到ESD损坏。为了提供额外的鲁棒性,ESD保护二极管可以放置在天线RF连接器到GND处
4.9.4天线/RF输入
检查射频输入要求和原理图:
•确保天线没有靠近电路中有噪声的部分,也没有面对任何其他有噪声的元件(例如微控制器、显示器)。
•射频输入的ESD保护是强制性的。
•可能的外部天线偏置-t电感器必须为L波段频率,并在GNSS波段选择高阻抗。
•确保RF跟踪被调谐到50Ω,以确保适当的GNSS带宽。
4.9.5接地
确保模块的接地垫接地
如果使用贴片式天线,则需要足够的天线接地平面
4.9.6方案设计
对于近地天体-M9L全球导航卫星系统模块的最小设计,请考虑以下功能和引脚:
•将电源连接到VCC和V_BCKP。
•V_USB:如果使用USB,建议按照USB自供电模式规范为V_USB供电。
•如果未使用USB,则将V_USB接地。
•确保与近地天体-M9L全球导航卫星系统模块的所有接地引脚实现最佳接地连接。
•选择所需的串行通信接口(UART、USB、SPI或I2C),并连接
为您的应用程序提供合适的引脚。
•如果您的应用程序需要热启动或热启动,请将备用电池连接到V_BCKP
4.9.7导则中的布局设计
•接收器是否远离热源?
•接收器是否放置在远离空气冷却源的位置?
•接收器是否用盖子/外壳屏蔽,以防止气流和快速气流的影响
环境温度变化?
•接收器是否按照布局和布局指南中的建议放置?
•确保VCC电源线上的串行电阻较低(选择>400 um的线宽)。
•保持电源线尽可能短。
•在模块下方添加接地平面,以减少干扰。这一点尤为重要
用于RF输入线。
•为了改善屏蔽,在微带/共面周围添加尽可能多的过孔
波导管、串行通信线路周围、模块下方等。
翻译自:
![]()

















 6905
6905

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









