







 本文介绍了灰度共生矩阵在图像处理中的应用,天文学中的岁差和章动现象,以及航空航天领域的卫星定姿和定轨技术,包括姿态敏感器的类型如磁强计、红外地球敏感器和太阳敏感器。此外,还探讨了小波理论的关键特性,如紧支性、对称性和正交性在信号处理中的重要性。
本文介绍了灰度共生矩阵在图像处理中的应用,天文学中的岁差和章动现象,以及航空航天领域的卫星定姿和定轨技术,包括姿态敏感器的类型如磁强计、红外地球敏感器和太阳敏感器。此外,还探讨了小波理论的关键特性,如紧支性、对称性和正交性在信号处理中的重要性。
1. 数字图像
灰度共生矩阵:灰度图像中某种形状的像素对,在全图中出现的次数
2. 航空航天
岁差和章动
岁差(axial precession),在天文学中是指回归年与恒星年的时间差。岁乃年也,岁差即年差,是回归年与恒星年的时间差。恒星年采用“钟表时”时间体系,是人造计时器;回归年采用历法时提前计算出来的地球表面“真太阳时”时间体系是天然计时器。两个时间体系累积一年的时间差就是岁差。
章动,月球绕地球旋转的的轨道称为白道,由于白道对于黄道约5°倾斜,这使得月球产生的转矩的大小和方向不断变化,月球围绕地球公转导致地球在公转轨道上左右摇摆,这种现象称为章动。
月球围绕地球公转,在月球引力的作用下,地球在轨道上围绕太阳公转的轨迹呈现出与月球公转周期左右摇摆的变化。地球差异旋转产生的回归年与恒星年的时间差称为岁差,而地球在公转轨道上左右摇摆的周期运动则称为章动。
卫星定姿和定轨
卫星定姿
卫星姿态是指卫星星体在轨道上运行所处的空间指向状态。直角坐标系的原点置于星体上,指向地面的Z轴反映偏航方向,Y轴反映俯仰方向,X轴反映滚动方向,通常采用三轴稳定、自旋稳定、重力梯度稳定等方式保持姿态的稳定。
卫星定轨
无摄运动:中心力决定着卫星运动的基本规律和特征,此时卫星的运动称为无摄运动,由此决定的卫星轨道可视为理想的轨道,又称卫星的无摄运动轨道。
受摄运动:在摄动力的作用下的卫星运动称为受摄运动,相应的卫星轨道称为受摄轨道。
为了研究工作和实际应用的方便,通常把作用于卫星上的各种力按其影响的大小分为两类:
一类是假设地球为均质球体的引力(质量集中于球体的中心),称为中心力,决定着卫星运动的基本规律和特征,由此决定的卫星轨道,可视为理想轨道,是分析卫星实际轨道的基础。
另一类是摄动力或非中心力,包括地球非球形对称的作用力、日月阻力、大气阻力、光辐射压力以及地球潮汐力等。摄动力使卫星的运动产生一些小的附加变化而偏离理想轨道,同时偏离量的大小也随时间而改变。
姿态敏感器
-
磁强计
地球自身是一个巨大的磁体,在地球的周围分布着强弱不同的磁场。
卫星上使用的磁强计就是通过测量磁场的强度来测定卫星的姿态。
使用磁强计的前提是建立在对地球磁场强度分布的测量与准确模型建立基础上的。

-
红外地平仪(红外地球敏感器)
通过看地球出现在自己面前的位置来判断自己的姿态。
地球是一个不断向外辐射能量的物体,和深空的寒冷形成了鲜明的对比,所以红外地平仪就是利用了这个原理来判断地球是否出现在了自己的视野之中。
多台红外地平仪协同工作就可以使得卫星可以更快更准确的确定自己所处的姿态。
红外地平仪由于精度等问题在国外的卫星中使用的越来越少,但是随着微纳卫星的发展,其低成本高可靠的特点又使得其找回了一点存在感。

-
太阳敏感器
太阳敏感器进行姿态确定的参照物就是太阳。对于卫星来说,进入阴影区域太阳敏感器就无法工作了,这也是它的局限性。通常搭配着别的敏感器共同工作。 -
星敏感器
星敏感器的参照物是恒星,这些恒星的好处是他们都离我们很遥远,所以他们的位置就可以认为是不变的。
星敏感器就是通过拍摄下星空的照片,然后和带着的星图比对得出自己所指的方向。
星敏感器算是现在在使用的卫星敏感器里最为顶尖的设备了,可以获得非常高的姿态测量精度。
但其使用也是受到局限的,一方面太敏感怕太阳,所以要主动地规避太阳;另一方面由于测量的要求高还要进行计算,所以卫星动的太快就没法使用了。 -
陀螺
星敏感器可以测得很准,但是怕卫星动,那么在卫星动得很快的时候就可以使用高精度的陀螺。
陀螺就是用来测量运动的。例如光学陀螺会发射出方向相反但是路径长度相同的两束光。如果星体没有旋转,那么这两束光到达终点的时间是相同的,这个时候的角速度就是0。那么如果卫星旋转起来,就改变了两束光的传播,这里差就可以解算出角速度。
在一个高精度的使用要求下,由星敏感器来测量一个精度很高的起点,用陀螺来以此起点进行高速姿态运动中的状态,从而获得较高的姿态测量精度。
3. 小波理论
小波基的数学特征
(1)紧支性
如果尺度函数和小波函数是紧支撑的,则对应的H,G滤波器是有限冲击响应(FIR)滤波器,信号在分解和重构快速算法中的运算量是有限的。该特征也决定了小波的时-频局部化特征,紧支宽度越窄,小波的局部化特性越好,紧支撑小波避免了滤波过程中的截断误差,因此应用精度很好。但是一个函数不可能在时域和频域都是紧支的,最多有一个是紧支的,另一个是急衰的,一般希望小波基能够在时域上具有紧支性。
(2)对称性
对称滤波器组在图像重建中更为有利,这有两点原因:一是人类视觉系统对边缘附近的对称的量化误差较非对称的误差更为不敏感;二是紧支撑小波的线性相位特性与小波的对称性是等价的。对图像进行小波变换时,需要对图像的边界数据进行周期延拓,对于线性相位的小波基,通过周期延拓,重建信号在边界处不会产生较大失真,而对于非线性相位的小波基,边界数据失真则比较明显,会导致巨大的感官误差。
(3)正交性和双正交性
正交小波对应一个正交镜像滤波器组,即低通滤波器和高通滤波器正交。Daubechies已证明,除Harr小波外,一切具有紧支集的规范正交小波基及与之相关的尺度函数都不可能以实轴上的任何点为对称轴或反对称轴。也就是说,除Harr小波基外,其他的小波函数无法同时满足紧支性、正交性和对称性。但是Harr小波基的局部化性能很差,很少用于实际应用。
(4)正则性
正则性是对函数光滑程度的一种描述,也是函数频域能量集中度的一种度量。
(5)消失矩
消失矩的大小决定了小波逼近光滑函数的收敛率。当图像光滑时,滤波器的消失矩越大,产生的小波变换系数越小,及小欧变换后的能量越集中于低频分量,因为更有利于图像的压缩。
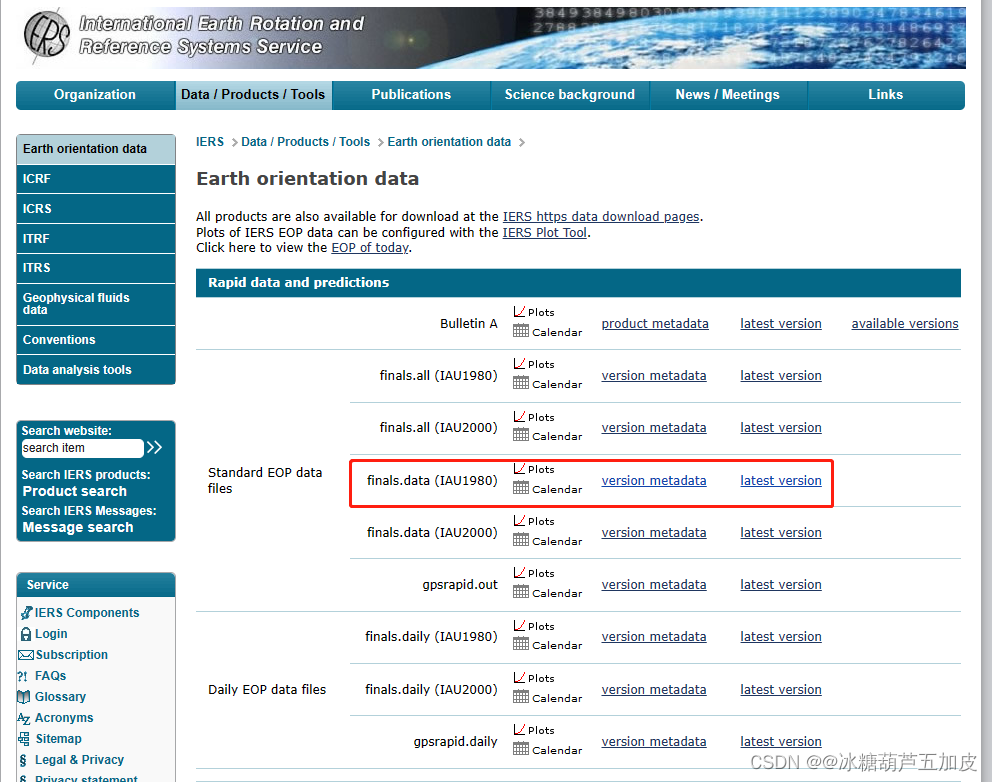
共享数据
- IERS(finals.data):https://www.iers.org/IERS/EN/DataProducts/EarthOrientationData/eop.html
- EearthExplorer:https://earthexplorer.usgs.gov/


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









