






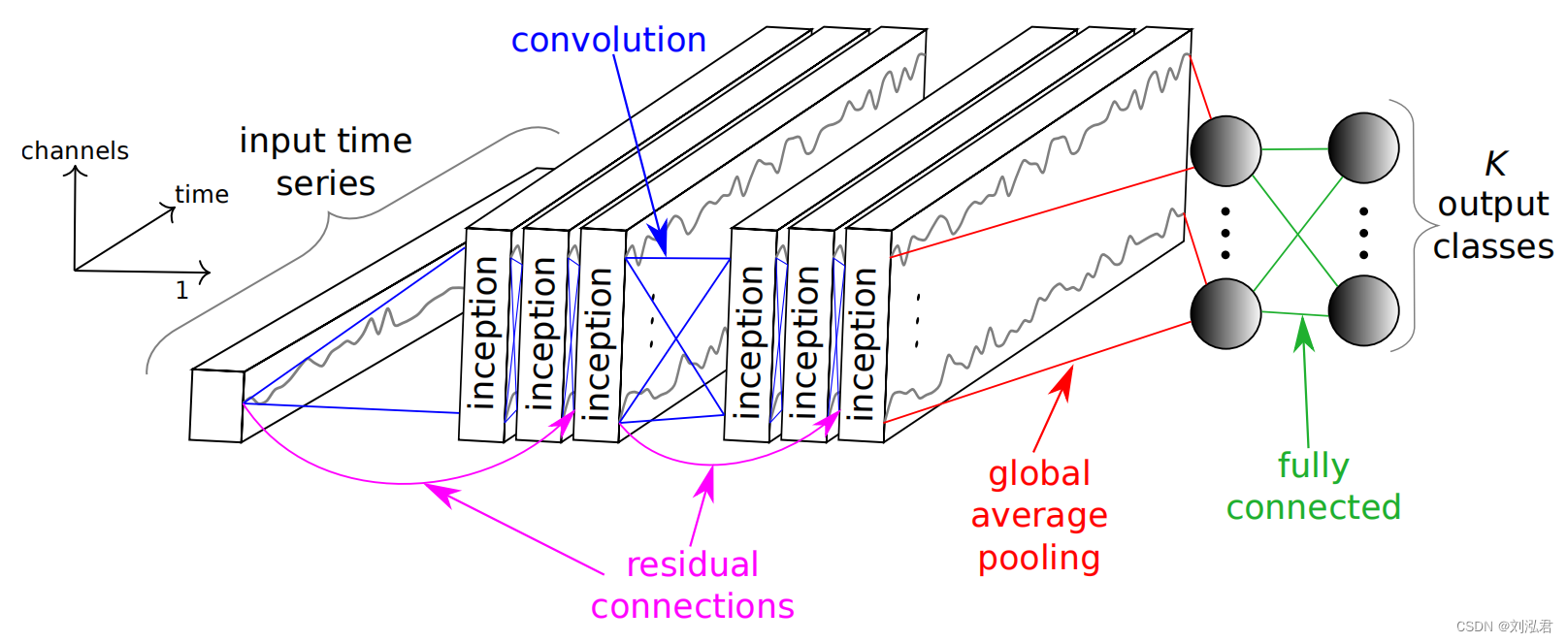
 该模型是一个使用Inception模块和残差连接的深度学习网络,用于处理时序数据。模型初始化时构建了网络结构,包括输入层、Inception模块、全局平均池化层和全连接层。Inception模块包含瓶颈层以减少维度,防止过拟合。残差连接在特定层数时启用,以帮助信息流畅并改善训练。模型使用Keras构建,并应用了优化器和回调函数进行训练监控和性能提升。
该模型是一个使用Inception模块和残差连接的深度学习网络,用于处理时序数据。模型初始化时构建了网络结构,包括输入层、Inception模块、全局平均池化层和全连接层。Inception模块包含瓶颈层以减少维度,防止过拟合。残差连接在特定层数时启用,以帮助信息流畅并改善训练。模型使用Keras构建,并应用了优化器和回调函数进行训练监控和性能提升。
看一下模型init:
class Classifier_INCEPTION:
def __init__(self, output_directory, input_shape, nb_classes, verbose=False, build=True, batch_size=64,
nb_filters=32, use_residual=True, use_bottleneck=True, depth=6, kernel_size=41, nb_epochs=1500):
self.output_directory = output_directory
self.nb_filters = nb_filters
self.use_residual = use_residual
self.use_bottleneck = use_bottleneck
self.depth = depth
self.kernel_size = kernel_size - 1
self.callbacks = None
self.batch_size = batch_size
self.bottleneck_size = 32
self.nb_epochs = nb_epochs
if build == True:
self.model = self.build_model(input_shape, nb_classes)
if (verbose == True):
self.model.summary()
self.verbose = verbose
self.model.save_weights(self.output_directory + 'model_init.hdf5')
可以发现,直接调用了self.build_model函数:
def build_model(self, input_shape, nb_classes):
# input_shape表示(输入时序数据的长度,输入数据的通道数),univariate的channel为1
input_layer = keras.layers.Input(input_shape)
x = input_layer
input_res = input_layer
# depth默认设置为6
for d in range(self.depth):
x = self._inception_module(x)
# 当depth=2和depth=5时,分别进行残差传递
if self.use_residual and d % 3 == 2:
x = self._shortcut_layer(input_res, x)
input_res = x
gap_layer = keras.layers.GlobalAveragePooling1D()(x)
# 表达式keras.layers.Dense(nb_classes, activation='softmax')(gap_layer)表示将gap_layer张量传递给Dense()层作为输入,并应用softmax激活函数生成输出张量。
output_layer = keras.layers.Dense(nb_classes, activation='softmax')(gap_layer)
model = keras.models.Model(inputs=input_layer, outputs=output_layer)
model.compile(loss='categorical_crossentropy', optimizer=tf.keras.optimizers.Adam(),
metrics=['accuracy'])
reduce_lr = keras.callbacks.ReduceLROnPlateau(monitor='loss', factor=0.5, patience=50,
min_lr=0.0001)
file_path = self.output_directory + 'best_model.hdf5'
model_checkpoint = keras.callbacks.ModelCheckpoint(filepath=file_path, monitor='loss',
save_best_only=True)
self.callbacks = [reduce_lr, model_checkpoint]
return model
其中,_inception_module代码如下:
def _inception_module(self, input_tensor, stride=1, activation='linear'):
print('input',input_tensor.shape)
if self.use_bottleneck and int(input_tensor.shape[-1]) > 1:
input_inception = keras.layers.Conv1D(filters=self.bottleneck_size, kernel_size=1,
padding='same', activation=activation, use_bias=False)(input_tensor)
else:
input_inception = input_tensor
print('inception',input_inception.shape)
# kernel_size_s = [3, 5, 8, 11, 17]
kernel_size_s = [self.kernel_size // (2 ** i) for i in range(3)]
conv_list = []
for i in range(len(kernel_size_s)):
conv_list.append(keras.layers.Conv1D(filters=self.nb_filters, kernel_size=kernel_size_s[i],
strides=stride, padding='same', activation=activation, use_bias=False)(
input_inception))
max_pool_1 = keras.layers.MaxPool1D(pool_size=3, strides=stride, padding='same')(input_tensor)
conv_6 = keras.layers.Conv1D(filters=self.nb_filters, kernel_size=1,
padding='same', activation=activation, use_bias=False)(max_pool_1)
conv_list.append(conv_6)
x = keras.layers.Concatenate(axis=2)(conv_list)
x = keras.layers.BatchNormalization()(x)
x = keras.layers.Activation(activation='relu')(x)
return x
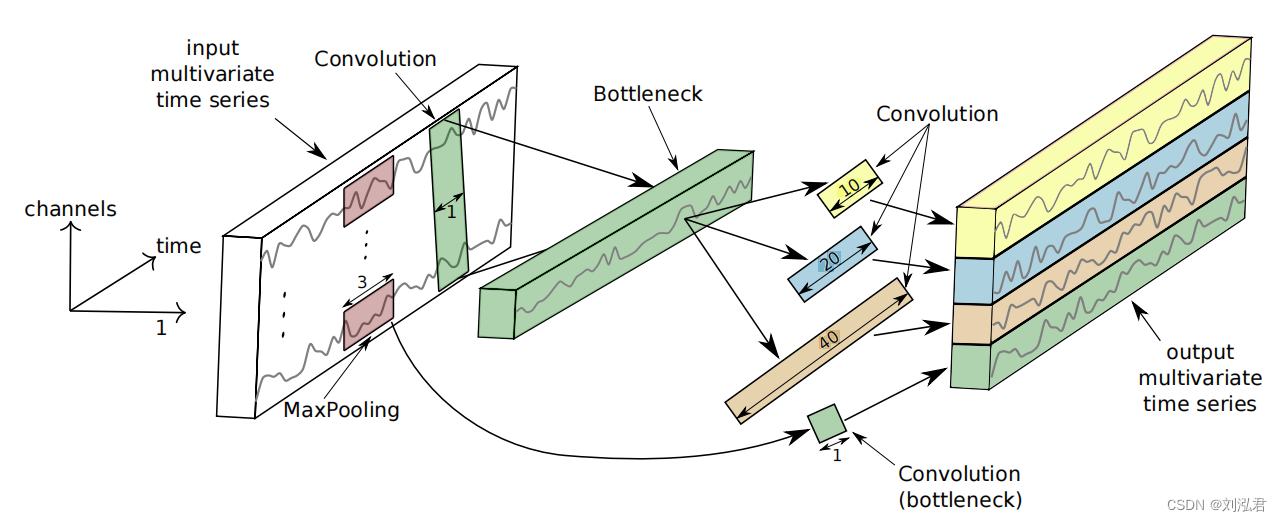
这里放上原文:
As for the Inception module, Fig. 2 illustrates the inside details of this operation. Let us consider
the input to be an MTS with M dimensions. The first major component of the Inception module
is called the “bottleneck” layer. This layer performs an operation of sliding m filters of length 1
with a stride equal to 1. This will transform the time series from an MTS with M dimensions
to an MTS with m M dimensions, thus reducing significantly the dimensionality of the time
series as well as the model’s complexity and mitigating overfitting problems for small datasets.
Note that for visualization purposes, Fig. 2 illustrates a bottleneck layer with m = 1.
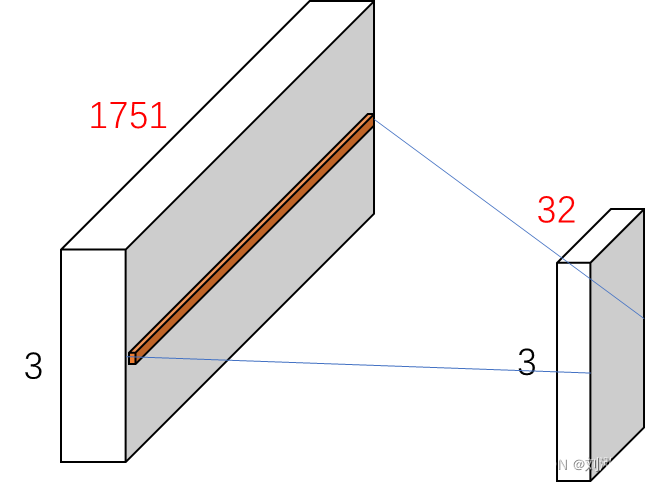
对于维度变化的理解:
假设此时我们有一个时序数据,3通道,长度1751

实验:在bottleneck中,设置filter_size=32,也就是滤波器数量32;经过bottleneck后,就变成了(3, 32)。
也就是说:在输入张量(input_tensor)的形状中,第一个维度(None)表示输入数据的数量未知,第二个维度(3)表示每个输入数据的通道数,而第三个维度(1751)表示每个通道的时间步数。因此,使用bottleneck设计的Conv1D层将时间步的特征数从1751降低到32,并保留通道数为3。输出张量(input_inception)的形状为(None, 3, 32),其中32表示每个时间步的特征数被降低到了32,3表示每个输入数据的通道数被保留下来,而None表示输入数据的数量未知。
(所以图画的让人产生歧义)
对一维卷积的理解:
Conv1D层是对输入张量的第二个和第三个维度进行卷积操作的一种方式。在时序数据中,通常使用Conv1D层来处理时间序列的每个时间步,其中每个时间步的特征被视为一维数据。在Conv1D层中,滤波器沿着时间步轴滑动,并计算输入时间步的特征与滤波器之间的卷积运算,从而生成输出特征。
在代码中,Conv1D层的输入张量形状为(batch_size, timesteps, features),其中batch_size是输入数据的数量,timesteps是时间步的数量,而features是每个时间步的特征数。Conv1D层的滤波器数量和大小由filters和kernel_size参数决定,padding和stride参数控制输出特征的大小和形状,activation和use_bias参数控制激活函数和是否使用偏置项。
(总觉得一维卷积的定义与实际当中的使用不太搭配,它相当于默认对第三维所有的值进行操作,kernel_size控制计算几个第二维(通道),参数filters控制第三维还剩下多少)
之后,就是拼起来,因此从32个特征变成了64个。
(代码里也没有体现论文中使用长度为40的卷积核)
根据我的理解,应该是这样子画图:
对于残差网络:
input_res = input_layer
# depth默认设置为6
for d in range(self.depth):
print(d)
x = self._inception_module(x)
# 当depth=2和depth=5时,分别进行残差传递
if self.use_residual and d % 3 == 2:
x = self._shortcut_layer(input_res, x)
input_res = x
def _shortcut_layer(self, input_tensor, out_tensor):
shortcut_y = keras.layers.Conv1D(filters=int(out_tensor.shape[-1]), kernel_size=1,
padding='same', use_bias=False)(input_tensor)
shortcut_y = keras.layers.normalization.BatchNormalization()(shortcut_y)
x = keras.layers.Add()([shortcut_y, out_tensor])
x = keras.layers.Activation('relu')(x)
return x
其中,x是inception学习的,也就是残差,input_res是作为初始值直接向后传递;但可以发现,input_res输入_shortcut_layer也要进行一个Conv1D也要进行学习。当然,他的目的可能是让特征长度一致。
附录:关于输入放在第二个括号中传入层
将输入张量作为第二个括号中的参数传递给Dense()函数,那么这是keras早期版本的语法。在早期版本中,可以通过将输入张量作为第二个参数传递来调用Dense()函数,例如:
output_layer = keras.layers.Dense(units=nb_classes, activation='softmax')(input_layer)
在这种情况下,input_layer是输入张量,它作为第二个参数传递给Dense()函数。这种方式仍然有效,但已被更新为更常见的函数式API,其中层被视为函数,并且可以像函数一样调用,将输入张量作为参数传递。
在更新的函数式API中,可以将输入张量作为第一个参数传递给Dense()函数,并将其结果传递给下一个层。例如:
dense_layer = keras.layers.Dense(units=64, activation='relu')
output_layer = dense_layer(input_layer)
在这种情况下,input_layer是输入张量,它作为第一个参数传递给Dense()函数,并将其结果存储在dense_layer变量中。可以继续将dense_layer作为输入传递给其他层或函数。

















 8138
8138

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









