






最近在学习图片的滤波和去噪的相关知识,查阅了一些资料参考了一些博客,这里做一个整合+理解。参考的博客资料在文末。
引入普通滤波的概念
假设输入图像为p,滤波窗口为wk,经过滤波后的输出图像为q,那么q图的第i个像素是由输入图p中以第i个像素为中心的窗口内的所有像素加权平均得到的,即:
从公式上来看,普通的例如均值滤波与引导滤波区别在于权重的选择上,也就是Wij(I)的不同。
引导滤波
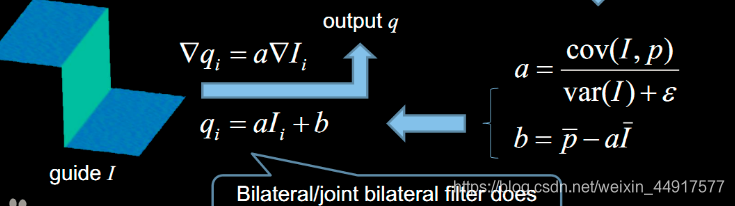
看到的最多的引导滤波的过程图如图所示:

我们逐步来看这个图,首先引导滤波有两个输入,原始图p和引导图I。经过滤波后有一个输出q,滤波窗口为Wk.整个引导滤波器的表示为公式:
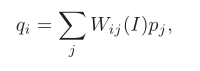
其中j∈Wk,j仅仅是在某一个窗口内的下标,Wij(I)是仅仅与引导图I相关的加权平均的那个权重。
首先我们看到引导图I,文章有一个重要的假设,就是使输入引导图I与输出图q之间是一个线性关系,表示为:

其中ak和bk表示常数参数,注意一个窗口Wk只对应一对常熟参数ak和bk。例如以第一个像素为中心的窗口W1的参数为a1,b1。以第二个像素为中心的窗口w2的参数为a2,b2.
也就是总流程图中的这一部分:
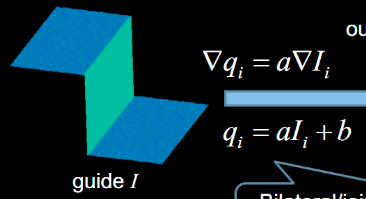
图中还对线性关系两边求导得到
这就表示引导图的梯度变化与结果图的梯度变化是线性关系的,假设在引导图中我们知道A区是平滑区域,B区是边缘区域,显然B区梯度比A区要大,而且假设B区的梯度是A区的4倍。通过线性变换,我们得到了输出图q中的A区和B区梯度变为引导图的a倍,但是B区的梯度仍然是A区的4倍,同一幅图中的A和B之间的梯度关系没有被扭曲,通俗来讲就是引导图告诉了输出图哪里是平滑区域,哪里是边缘区域。这就是引导图的作用。
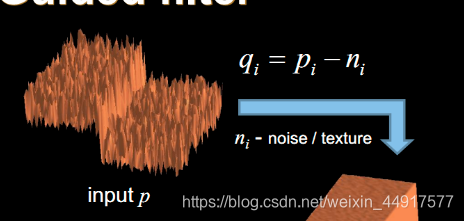
我们已知了引导图I,如果能求得系数ab的值,就可以计算出输出了。这时候就需要引入另外一个概念:噪声
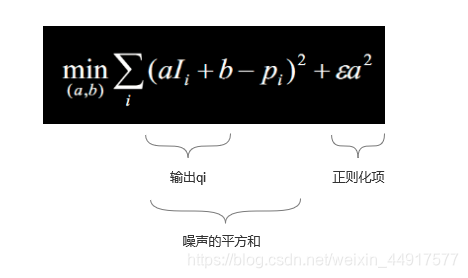
利用最小二乘法就能计算出参数a,b。
通过上述的最小二乘法可以计算出参数a,b的表达式
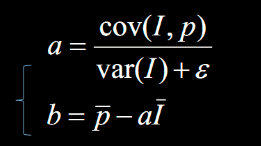
具体详细的公式推导可以参考链接:
https://blog.csdn.net/weixin_43194305/article/details/88959183
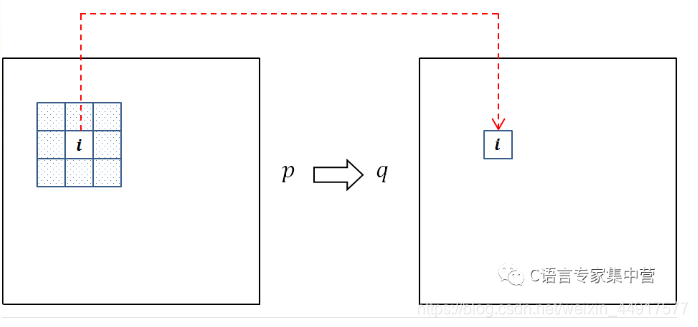
计算出了参数之后,我们就可以将线性模型应用到整个图像的滤波窗口,但一个像素会被多个窗口包含,如下图,若Wk大小为3x3,则除边缘区域的外的每个点会被包含在9个窗口里,因此对于同一个像素,会得到|w|个输出qi。
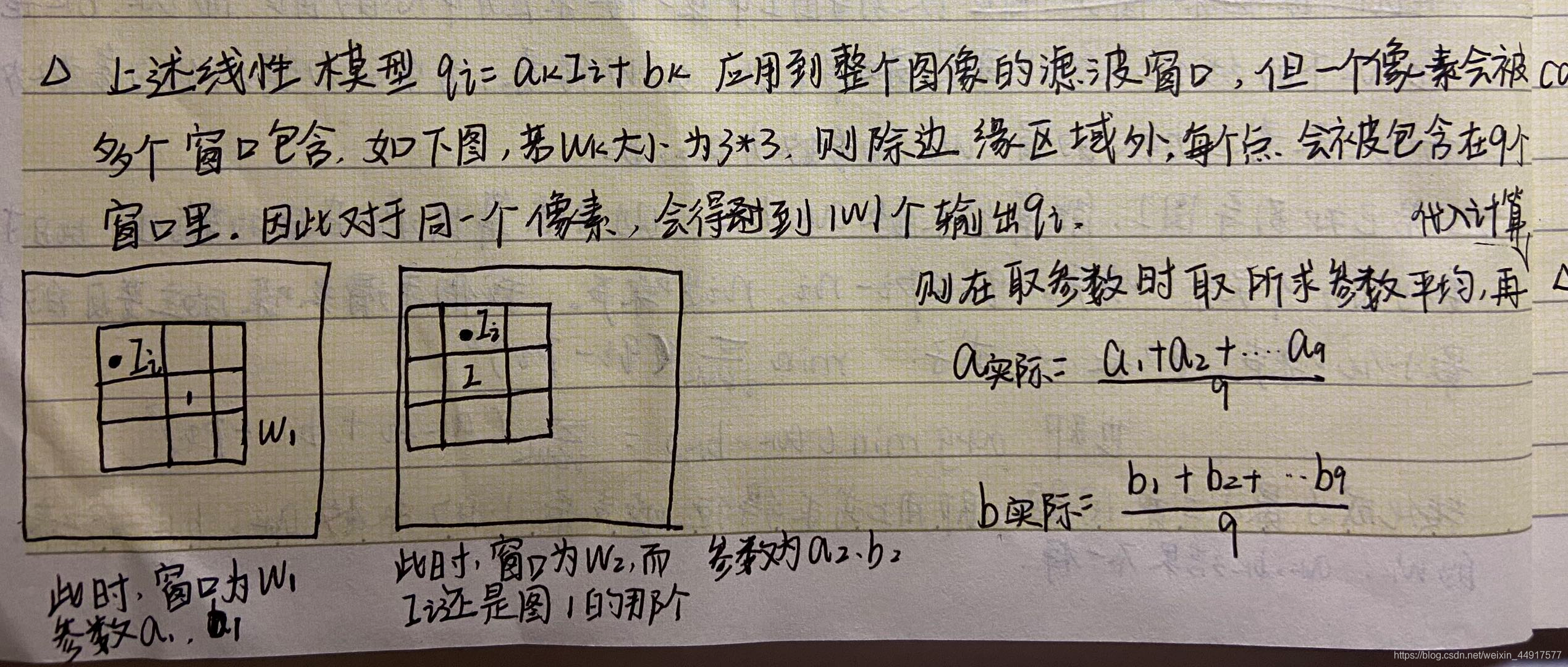
我们最后需要用的参数a,b就是所求的平均的参数a,b。
最后将参数代回线性关系公式中,就可以得到输出,过程如下图所示
matlab实现代码在这里
链接:https://pan.baidu.com/s/12B2s8FuvFH1MBQPKhlz5rg
提取码:oxdw
压缩包中的文件如图所示
需要注意的是,需要写两个函数文件:boxfilter.m和guidedfilter.m。其中guidedfilter.m需要调用boxfilter.m函数,GuidedFilter_preserveEdge.m是主函数,用来调用guidedfilter函数,本代码用的输入图和引导图是同一张cat.bmp。演示的是保边效果,可以更换引导图和输入图。

















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









