






 本文详细介绍了运动模糊图像复原模型,包括PSF的概念、运动模糊的成因、算法原理,如利用卷积和傅里叶变换处理模糊图像。重点讲述了如何通过频域和倒谱法估计运动模糊参数,以及后续的图像复原步骤和优缺点。
本文详细介绍了运动模糊图像复原模型,包括PSF的概念、运动模糊的成因、算法原理,如利用卷积和傅里叶变换处理模糊图像。重点讲述了如何通过频域和倒谱法估计运动模糊参数,以及后续的图像复原步骤和优缺点。
运动模糊图像复原模型PSF
- 目的及用途
通过估计运动模糊参数,利用运动模糊图像复原模型,实现对运动模糊图像的复原。
运动模糊,顾名思义,就是在场景中发生运动的物体在场景拍摄曝光时所产生的模糊效果。
运动模糊现象出现的原因:物体和相机的相对运动。
例如:疾驰的汽车、田径场上的短跑运动员。
- 算法概述
- 算法原理
PSF是Point Spread Function,点扩散函数,即点光源经过系统后形成的光斑。即便是没有像差的理想系统,由于孔径带来的衍射因素,点光源也不能汇聚成一个无穷小的点,只能“散成一滩”PSF。
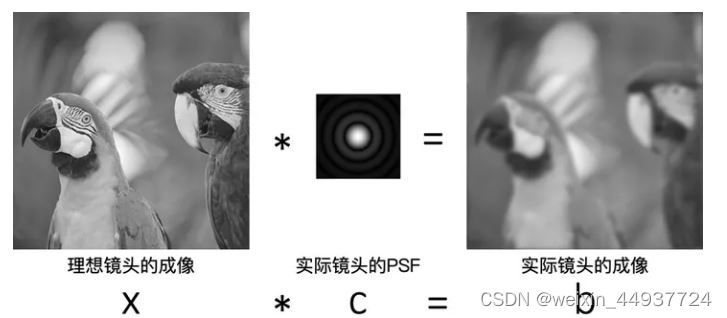
假设有一个理想镜头,不受衍射的影响,用它所成的像为x,而实际镜头的PSF为c,实际镜头的成像是b,那么这三者之间的关系是一种典型的卷积关系:
根据实际镜头的成像b,以及镜头的PSF,获取理想的成像x。
- 预备知识
(1)卷积
空域的卷积相当于频域的乘法;
去卷积相当于在频域上做除法;
对除法的结果做反傅里叶变换就可以得到去卷积的结果。
(2)Radon变换
(3)二维傅里叶变换
- 运动模糊图像退化模型
对模糊图像进行复原的关键是建立图像的退化模型,在考虑噪声的情况下,图像的退化模型可近似用统一的线性模型表示为
gx,y=fx,y*hx,y+nx,y (1)![]()
式中,gx,y![]() 为退化图像;hx,y
为退化图像;hx,y![]() 为退化函数;fx,y
为退化函数;fx,y![]() 为原始图像;nx,y
为原始图像;nx,y![]() 为随机噪声函数;*
为随机噪声函数;*![]() 为卷积。
为卷积。
对式(1)进行傅里叶变换则有
Gu,v=Fu,vHu,v+Nu,v (2)![]()
式中,Gu,v![]() ,Fu,v
,Fu,v![]() ,Hu,v
,Hu,v![]() ,Nu,v
,Nu,v![]() 分别为式(1)各函数的傅里叶形式。
分别为式(1)各函数的傅里叶形式。
原图像fx,y![]() 通过退化函数PSF影响退化后的图像为gx,y
通过退化函数PSF影响退化后的图像为gx,y![]() ,求解PSF是复原模糊图像的核心问题。
,求解PSF是复原模糊图像的核心问题。
由于变速与非直线运动都可分解为各段的匀速直线运动,所以,研究匀速直线运动产生的运动模糊具有普遍意义,PSF由下式表示
hx,y=1L,0≤x≤Lcosθ,0≤y≤xtanθ0, otherwise (3)![]()
式中,θ![]() 为物体运动方向与水平方向之间的夹角,称为运动模糊角度,L
为物体运动方向与水平方向之间的夹角,称为运动模糊角度,L![]() 为运动方向上像素移动的距离,称为运动模糊尺度。得知运动模糊角度θ
为运动方向上像素移动的距离,称为运动模糊尺度。得知运动模糊角度θ![]() 与运动模糊尺度L
与运动模糊尺度L![]() ,便可求解PSF,进而进行运动模糊图像复原。
,便可求解PSF,进而进行运动模糊图像复原。
- 算法输入、输出
- 输入:实际图像、运动模糊角度θ
 、运动模糊尺度L
、运动模糊尺度L
- 输出:复原后的图像
- 算法参数
- 运动模糊角度θ

- 运动模糊尺度L

- 算法步骤
参考运动模糊恢复_restoration of blurred, noisy image using estimate_NineDays66的博客-CSDN博客
- 主要步骤
运动模糊角度θ![]() 的估计:常见的辨识方法有频域法和倒谱法;
的估计:常见的辨识方法有频域法和倒谱法;
频域法的原理是将退化图像进行二维傅里叶变换,得到具有相互平行的规则明暗条纹的频谱。设暗纹与x轴正向夹角为φ![]() ,运动模糊方向与x轴夹角为θ
,运动模糊方向与x轴夹角为θ![]() ,图像尺寸为M×N
,图像尺寸为M×N![]() ,根据傅里叶变换的时频特性可以知道,可通过公式tan(θ)=tan(φ-90°)×MN
,根据傅里叶变换的时频特性可以知道,可通过公式tan(θ)=tan(φ-90°)×MN![]() ,得到模糊角度θ
,得到模糊角度θ![]() ,因此只要通过Radon变换检测出频谱暗条纹与水平方向的夹角即可得到运动模糊方向。
,因此只要通过Radon变换检测出频谱暗条纹与水平方向的夹角即可得到运动模糊方向。
预备知识-二维傅里叶变换:
一维傅里叶变换的公式为Fω=-∞+∞f(x)e-jωxdx![]() ,通俗来讲,一维傅里叶变换是将一个一维的信号分解成若干个复指数波。而由于ejωx=cos(ωx)+jsin(ωx)
,通俗来讲,一维傅里叶变换是将一个一维的信号分解成若干个复指数波。而由于ejωx=cos(ωx)+jsin(ωx)![]() ,所以可以将每一个复指数波ejωx
,所以可以将每一个复指数波ejωx![]() 都视为是余弦波与正弦波的组合。
都视为是余弦波与正弦波的组合。
类似的,二维傅里叶变换的公式为Fu,v=-∞+∞-∞+∞f(x,y)e-j2π(ux+vy)dxdy![]() ,将一个图像分解成若干个复平面波ej2π(ux+vy)
,将一个图像分解成若干个复平面波ej2π(ux+vy)![]() 之和,一维傅里叶变换与二维傅里叶变换示意图如图1所示,图像的二维傅里叶变换如图2所示。
之和,一维傅里叶变换与二维傅里叶变换示意图如图1所示,图像的二维傅里叶变换如图2所示。
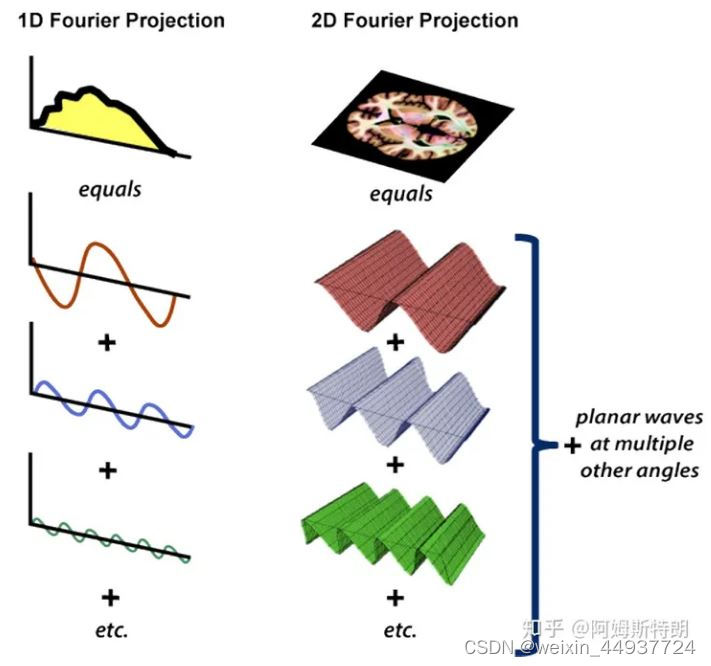
图1 一维傅里叶变换与二维傅里叶变换示意图

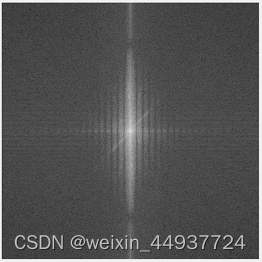
图2 图像的二维傅里叶变换
原图水平方向上变化更多,是水平方向上的运动模糊(其相间条纹是竖直的),所以频谱图水平方向更亮。竖直方向变化比水平方向少,所以较水平方向暗。
沿着模糊运动方向变化更多,对应的频谱图上模糊运动方向更亮,只要通过Radon变换检测出频谱暗条纹与水平方向的夹角即可得到运动模糊方向。
倒谱法的主要原理是先将退化图像进行二维傅里叶变换,然后取对数,再进行反傅里叶变换得到退化图像的倒频谱,分离出退化图像的模糊信息,进而通过Radon变换得到运动模糊方向。
Radon变换是对频谱图上某一指定角度进行线积分,通过计算1°~180°的Radon变换得到180列的矩阵R,每一列向量是图像在一个角度上沿一簇直线的积分投影,因为积分直线束与频谱中的亮暗条纹平行,所以所得的投影向量中应有一个最大值,在频域法中最大值所对应的列数就等于模糊方向与x轴正方向水平夹角;在倒谱法中,最大值对应的列数±90°即为所求的运动模糊角度。
运动模糊尺度L![]() 的估计:
的估计:
可以沿运动方向对模糊图像求方向导数,得到一正一负两个原始图像的叠加像,两者的距离就是模糊尺度。
根据倒频谱负峰值距离估计出模糊尺度。
- 对退化图像gx,y
 、PSF(hx,y
、PSF(hx,y )、随机噪声函数nx,y
)、随机噪声函数nx,y 分别进行傅里叶变换,得到Gu,v
分别进行傅里叶变换,得到Gu,v 、Hu,v
、Hu,v 、Nu,v
、Nu,v
- 根据式(2),计算原始图像的傅里叶变换Fu,v

- 对Fu,v
 进行傅里叶逆变换,获得原始图像(复原后的图像)。
进行傅里叶逆变换,获得原始图像(复原后的图像)。
- 算法优缺点
- 优点:利用退化过程的先验知识使已退化的图像恢复本来面目。
- 缺点:
- 估计误差大、有效估计范围有限
- 对整幅图像进行全局的复原:由于物体运动而产生的相对运动,其运动模糊只出现在物体运动的轨迹上,而背景是清晰的,在这种情况下就不能对全局进行处理。
- 利用Radon变换直接求取模糊尺度存在一定的缺点,当模糊图像中含有的噪声强度较大时,其频谱图的暗条纹会变得模糊不清。
- 改进方向
- 分块复原时局部图像块的大小
根据图像的整体模糊特征确定局部图像块的大小,对每个局部图像块分别进行复原。
- 运动模糊参数的估计
对于全局模糊(即由于镜头运动导致模糊)的图像,先将图像进行分块,找出最能代表原始模糊图像模糊特征的子图像块,仅仅根据最具代表性的子图像块估计运动模糊参数,减少计算量。
对于局部模糊(即由于物体运动导致模糊)的图像,先获取物体运动区域,仅对物体运动区域进行复原。
(参考论文《基于改进PSF估计的车载复杂图像复原》)
场景分析,在汽车的行驶过程中,摄像头相对于背景发生运动,并且在背景图像中,其它物体也有相对运动。
主要思想:
- 先求出全局运动模糊核,对图像进行全局模糊恢复,去除全局运动模糊;
在模糊图像块的频谱图中,亮暗条纹相间,可通过相间的条纹的角度来计算出模糊角度,一般使用Radon变换来估算出方向。模糊图像的像素点具有很强的相关性,像素点的灰度值逐渐变化,因此可通过模糊图像的自相关函数图求得模糊尺度。
- 再结合图像的局部均方差和结构相似度来判断图像块是否模糊,分割出局部模糊区域,对其进行复原;
局部均方差:当图像模糊时,图像相邻间的像素关联性较强、变化缓慢,从而均方差也较小。因此对于模糊失真的图像比较敏感,可用均方差来比较两幅图像是否模糊。
结构相似度:亮度、对比度和结构。
- 最后合成清晰的图像

















 2779
2779

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









