







基于暗原色先验的单幅图像去雾——算法复现
MOOC 数字图像处理的大作业学习
暗原色先验理论
暗原色先验是对无雾图像的统计规律,对无雾的图像的研究,发现在绝大多数户外无雾图像的任意局部小块中,总存在一些像素,他们的某一个或几个颜色通道的强度值很低,且接近于零,称之为暗原色。
求取暗原色的公式:
J
d
a
r
k
(
x
)
=
min
y
∈
(
r
,
g
,
b
)
(
min
y
∈
Ω
x
(
J
c
(
y
)
)
)
J_{dark}(x) = \min_{y \in (r,g,b)}(\min _{y\in\Omega_x}(J_c(y)))
Jdark(x)=miny∈(r,g,b)(miny∈Ωx(Jc(y)))
暗原色求取过程,首先将雾图像在RGB空间进行分解,在局部块中取最下值的操作,求得R,G,B三通道中最小分量,然后采用Marcel van Herk的快速算法对最小分量值进行局部区域最小滤波,也即灰度腐蚀操作。
暗原色点主要存在与物体的局部阴影、自然景观的投影、黑色物体或表面以具有鲜艳颜色的物体及表面。
暗原色先验去雾
雾天图像退化模型
I
(
x
)
=
J
(
x
)
∗
t
(
x
)
+
A
(
1
−
t
(
x
)
)
I(x)=J(x)*t(x)+A(1-t(x))
I(x)=J(x)∗t(x)+A(1−t(x))
I(x):雾化图像
J(x):景物光线的强度(原始图像)
A: 大气光成分
t(x):通过率
通过暗原色先验估测出雾的透过率图,在利用透过率恢复场景J(x)。
步骤:
- 将带雾图像I分成15*15的块,求得局部和全局暗原色图
- 假设全球大气光成分已知,利用暗原色图粗略估测透过率图t(x)
- 软件抠图细化透过率图
- 利用暗原色先验估计大气光成分A
- 由雾图模型以及参数I,A和 t(x),恢复无雾图像J
图像预处理
clear;
img_name = './res/SGP_Bing_588.png';
I = double(imread(img_name))/255; % 归一化
figure,imshow(I);title("原始图像");
暗原色图
求取暗原色的公式:
J
d
a
r
k
(
x
)
=
min
y
∈
(
r
,
g
,
b
)
(
min
y
∈
Ω
x
(
J
c
(
y
)
)
)
J_{dark}(x) = \min_{y \in (r,g,b)}(\min _{y\in\Omega_x}(J_c(y)))
Jdark(x)=y∈(r,g,b)min(y∈Ωxmin(Jc(y)))
J
c
J_c
Jc为J的R,G,B三通道中的一个颜色通道,
Ω
x
\Omega_x
Ωx是以x为中心的局部区域。
[h,w,c] = size(I); % 求出图像的高、宽、通道(RGB,3通道)
win_size = 7;
img_size = w*h;
dehaze = zeros(img_size*c,1);
dehaze = reshape(dehaze,h,w,c);
win_dark = zeros(img_size,1);
for cc=1:img_size
win_dark(cc)=1;
end
win_dark = reshape(win_dark,h,w);
% darkchannel
for j = 1+win_size:w-win_size
for i = 1+win_size:h-win_size
m_pos_min = min(I(i,j,:)); % 在局部块中心最小值,R、G、B三通道中的最小分量,因为用的是15*15的,中心(8,8)
% win_size*win_size 区域里面最小滤波
for n = j-win_size : j+win_size
for m = i-win_size : i+win_size
if(win_dark(m,n) > m_pos_min)
win_dark(m,n) = m_pos_min;
end
end
end
end
end
figure,imshow(win_dark);title("暗原色图像");
透过率估计
雾天图像退化模型
I
(
x
)
=
J
(
x
)
∗
t
(
x
)
+
A
(
1
−
t
(
x
)
)
I(x)=J(x)*t(x)+A(1-t(x))
I(x)=J(x)∗t(x)+A(1−t(x))
假设大气光成分A已知,在局部区域内,透过率保持一致
min
(
min
y
∈
Ω
x
(
I
c
(
y
)
A
c
)
)
=
t
(
x
)
min
c
(
min
y
∈
Ω
x
(
I
c
(
y
)
A
c
)
)
+
(
1
−
t
(
x
)
)
\min (\min_{y \in \Omega_x} (\frac{I_c(y)}{A_c})) = t(x) \min_c ( \min _{y \in \Omega_x} (\frac{I_c(y)}{A_c})) + (1-t(x))
min(y∈Ωxmin(AcIc(y)))=t(x)cmin(y∈Ωxmin(AcIc(y)))+(1−t(x))
有已知无雾图像的暗原色值很小,接近0,且
A
≠
0
A \ne 0
A=0 。
t
(
x
)
=
1
−
min
c
(
min
y
∈
Ω
x
(
I
c
(
y
)
A
c
)
)
t(x) = 1 - \min _c ( \min _{y \in \Omega_x}( \frac { I_c(y) } { A_c} ) )
t(x)=1−cmin(y∈Ωxmin(AcIc(y)))
min
c
(
min
y
∈
Ω
x
(
I
c
(
y
)
A
c
)
)
\min_c(\min _{y \in \Omega_x}( \frac { I_c(y) } { A_c} ))
minc(miny∈Ωx(AcIc(y)))正好是用A归一化的带雾图像的暗原色。
考虑空间透视现象,彻底移除雾会使图像看起来不真实,引进一个常数ω(0<ω ≤1),有针对性的保留一部分遥远景物的雾。
t
(
x
)
=
1
−
ω
min
c
(
min
y
∈
Ω
x
(
I
c
(
y
)
A
c
)
)
t(x) = 1 - \omega\min _c ( \min _{y \in \Omega_x}( \frac { I_c(y) } { A_c} ) )
t(x)=1−ωcmin(y∈Ωxmin(AcIc(y)))
实验表明:一般浓雾越大,ω的值越大,越接近1;薄雾情况下ω偏下,在0.7左右。
文中选取0.8。
% 每个点都需要计算
for cc=1:img_size
win_dark(cc) = 1-win_dark(cc)*0.8;
end
无雾图像复原
首先选取暗原色中亮度最高的0.1%像素,并把它们在输入图像I中对应的最大亮度值,最为大气光A的估计值。A不一定是图像中最亮的值。
J
(
x
)
=
I
(
x
)
−
(
1
−
t
m
a
x
(
x
)
)
A
t
m
a
x
(
x
)
J(x) = \frac { I(x) - (1-t_{max}(x) )A} { t_{max}(x) }
J(x)=tmax(x)I(x)−(1−tmax(x))A
其中:
t
m
a
x
(
x
)
=
max
(
t
(
x
)
,
t
0
)
t_{max}(x)= \max (t(x),t0)
tmax(x)=max(t(x),t0)
t0是透过率的下限值。
下面的代码看不懂了,后面有时间再研究。
win_b = zeros(img_size,1);
for ci=1:h
for cj=1:w
if(rem(ci-8,15) < 1)
if(rem(cj-8,15) < 1)
win_b(ci*w + cj) = win_dark(ci*w +cj); % 前8行,前8列,以及行列均为15的倍数的点
end
end
end
end
neb_size = 9;
win_size = 1;
epsilon = 0.0000001;
indsM = reshape([1:img_size],h,w);
tlen = img_size * neb_size^2;
row_inds = zeros(tlen,1);
col_inds = zeros(tlen,1);
vals = zeros(tlen,1);
len=0;
for j=1+win_size : w-win_size
for i=1+win_size : h-win_size
if(rem(ci-8,15)<1)
if(rem(cj-8,15)<1)
continue;
end
end
win_inds = indsM(i-win_size:i+win_size,j-win_size:j+win_size);
win_inds = win_inds(:);
winI = I(i-win_size:i+win_size,j-win_size:j+win_size,:);
winI = reshape(winI,neb_size,c);
win_mu = mean(winI,1)';
win_var = inv(winI'*winI/neb_size-win_mu*win_mu'+epsilon/neb_size*eye(c));
winI = winI - repmat(win_mu',neb_size,1);
tvals = (1+winI*win_var*winI')/neb_size;
row_inds(1+len:neb_size^2+len) = reshape(repmat(win_inds,1,neb_size),...
neb_size^2,1);
col_inds(1+len:neb_size^2+len) = reshape(repmat(win_inds',neb_size,1),...
neb_size^2,1);
vals(1+len:neb_size^2+len) = tvals(:);
len = len + neb_size ^ 2;
end
end
vals = vals(1:len);
row_inds = row_inds(1:len);
col_inds =col_inds(1:len);
A = sparse(row_inds,col_inds,vals,img_size,img_size);
sumA = sum(A,2);
A = spdiags(sumA(:),0,img_size,img_size) - A;
% 创建稀疏矩阵
D = spdiags(win_b(:),0,img_size,img_size);
lambda = 1;
x = (A + lambda*D)\(lambda*win_b(:).*win_b(:));
% 去掉0-1范围以外的数
alpha = max(min(reshape(x,h,w),1),0);
figure,imshow(alpha);
A = 220/255;
for i = 1:c
for j = 1:h
for l = 1:w
dehaze(j,l,i) = (I(j,l,i)-A)/alpha(j,l) + A;
end
end
end
figure,imshow(dehaze);
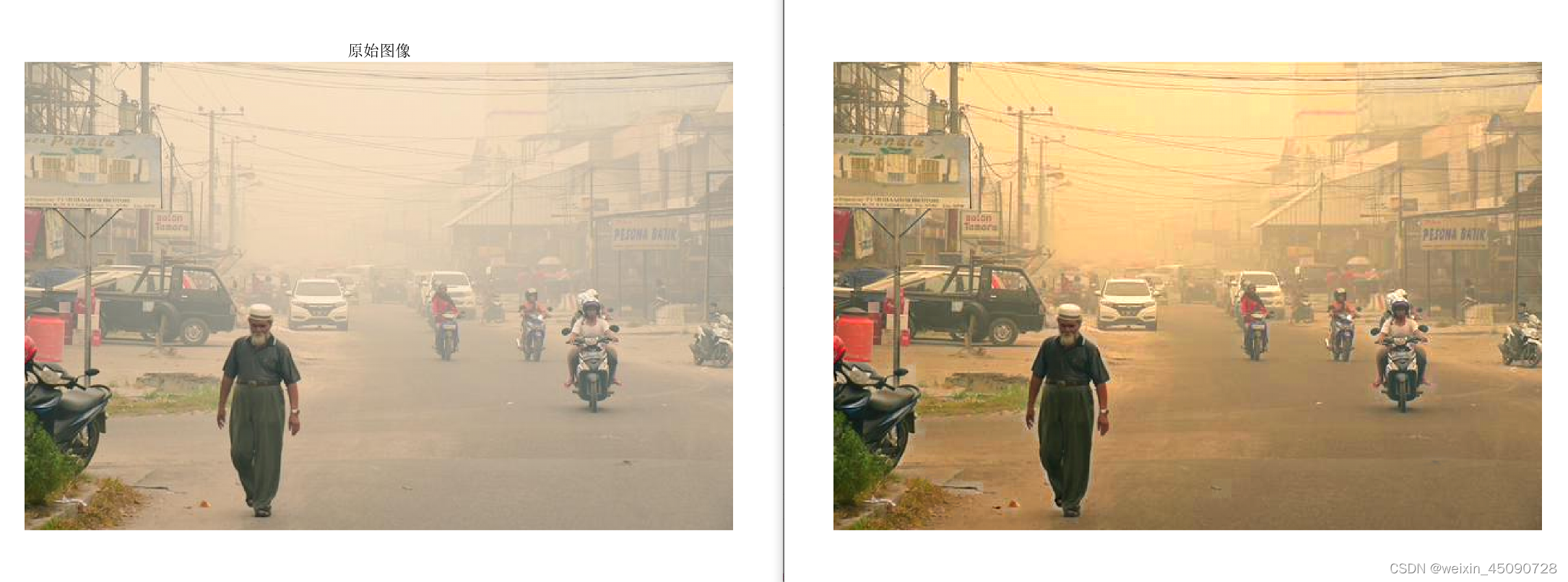
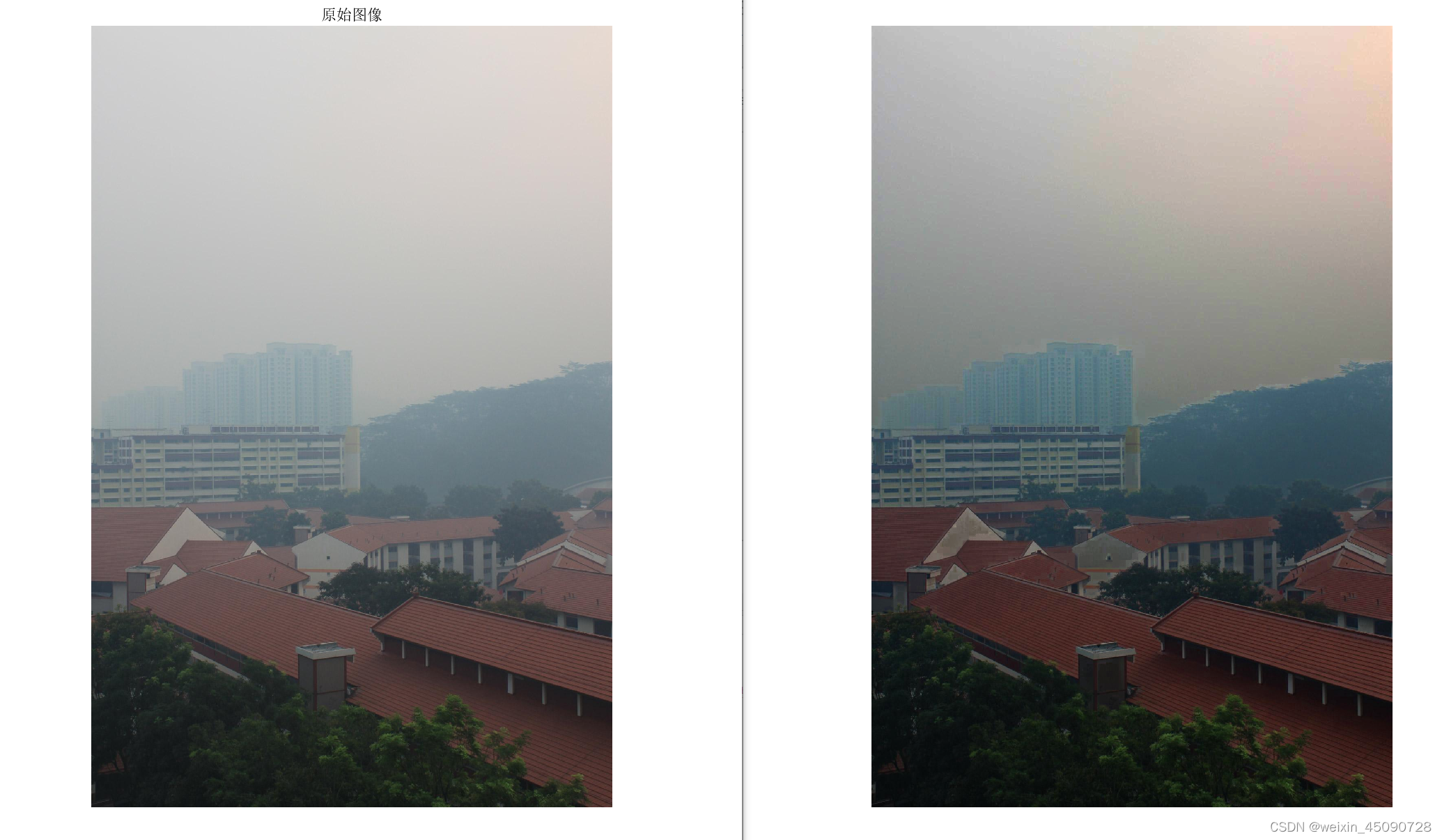
实际效果
使用RESIDE 图像去雾数据集的部分图像,下载地址: https://hyper.ai/datasets/18179
参考文章
备注
- 图像复原部分的代码没看懂
- 用一些图片计算会出现内存不足的问题(8个G都不够),运行时间也比较长


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









