






1、单片机IO口开漏输出和推挽输出有什么区别?
在单片机中,IO口(输入/输出口)的输出模式通常可以选择为开漏输出(Open-Drain)或推挽输出(Push-Pull)。这两种输出模式有一些关键的区别:
-
开漏输出(Open-Drain):
- 特点: 在开漏输出模式下,输出引脚可以拉低(输出 0),但无法主动拉高。它通常需要外部上拉电阻,以确保在开漏输出为高电平时,电路能够正常工作。
- 适用场景: 适用于多个设备共享同一信号线的情况,例如总线结构(I2C、SPI等)中的 SDA 或 SCL。
-
推挽输出(Push-Pull):
- 特点: 在推挽输出模式下,输出引脚可以拉低或拉高,因此可以提供更高的输出电流。推挽输出在拉高和拉低时都有电流流过,因此在输出高电平时能够提供更好的驱动能力。
- 适用场景: 适用于直接驱动单个设备或需要输出高电平时提供更强电流的情况。
-
混合输出(Open-Drain with Pull-Up):
- 特点: 有些微控制器的IO口支持混合输出,即开漏输出与内部上拉电阻结合。这样可以在需要拉高时,通过内部上拉电阻提供上拉,而在拉低时,通过开漏输出拉低。
- 适用场景: 可以用于一些需要开漏输出和同时提供上拉的特殊情况。
选择开漏输出还是推挽输出取决于你的具体应用需求。如果需要在一个总线上共享信号,而且有其他设备提供上拉电阻,那么开漏输出可能更适合。如果需要直接驱动设备,推挽输出通常更为合适。
2.
单片机里定时器有什么作用和优势?
在单片机中,定时器是一种非常重要的硬件资源,具有多种用途和优势,其中一些包括:
-
计时和延时: 定时器的主要作用是进行时间测量。通过定时器,你可以实现在一定时间间隔内执行某个任务,或者测量特定操作的执行时间。此外,定时器也可用于生成精确的延时,使得在程序中实现精确的时间控制成为可能。
-
PWM(脉宽调制)输出: 定时器可以用于产生脉宽调制信号。通过调整定时器的计数值,可以产生不同占空比的 PWM 波形,用于控制电机速度、LED亮度等。
-
定时中断: 定时器可以配置为定时中断,当计时器溢出时触发中断。这种中断机制允许你在规定的时间间隔内执行特定的任务,使得实时系统能够按照预定的时间表运行。
-
系统时钟: 一些定时器可以用作系统时钟源,提供基准时钟频率,用于同步其他部件的操作。
-
脉冲计数: 定时器可以用于计算输入脉冲的数量,例如用于测量旋转编码器的脉冲或计算外部事件的频率。
-
实时时钟(RTC): 一些定时器功能强大到足以充当实时时钟,提供日历和时间功能。
优势包括:
-
硬件实现: 定时器是硬件模块,可以在后台运行,而无需占用主处理器的大量时间。这使得定时器非常适合执行与时间相关的任务,而无需对主处理器进行大量的轮询。
-
精确性: 定时器提供硬件级别的时间测量,因此具有很高的精度。这使得定时器在需要精确的时间控制的应用中非常有用。
-
多功能性: 定时器通常具有多种模式和配置选项,可用于多种用途。这使得它们成为适用于各种应用的灵活工具。
总的来说,定时器是单片机中用于实现时间相关任务和操作的重要工具,它在许多嵌入式系统中都扮演着关键的角色。
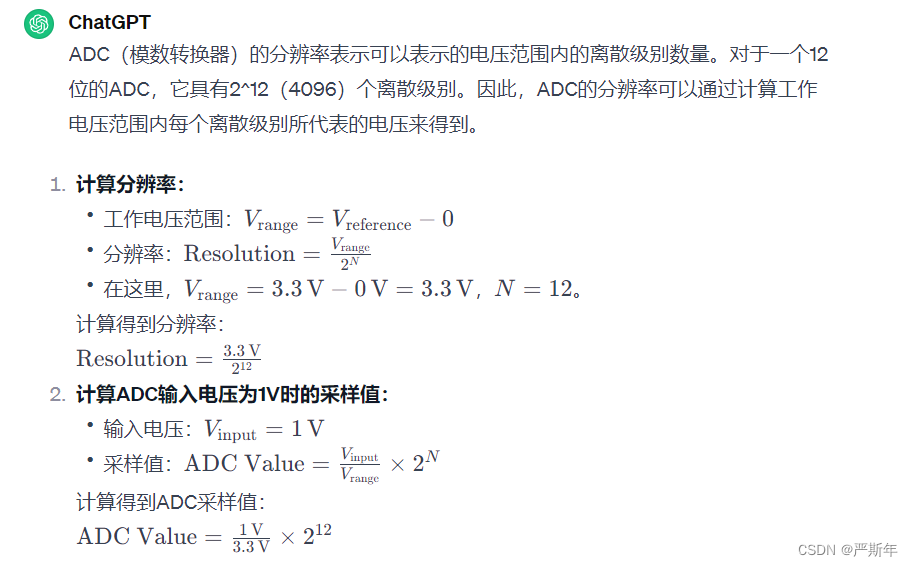
3、已知单片机内置12位精度的ADC,单片机工作电压3.3V,ADC基准电压3V,请计算ADC采样的电压最小分辨率是多少?如果单片机ADC输入口电压为1V,则采样得到的值是多少?
5.同步通信和异步通信有什么区别?UART、SPI和I2C分别属于什么类型的通信方式?
同步通信和异步通信的区别:
-
同步通信:
- 特点: 在同步通信中,数据的传输是通过共享时钟信号进行同步的,发送端和接收端的时钟是相互关联的。
- 优点: 同步通信可以提供高带宽,对时序要求较为严格。
- 缺点: 实现相对复杂,设备之间需要共享时钟信号。
-
异步通信:
- 特点: 异步通信中,数据的传输不依赖于共享时钟信号,而是通过包含起始位、数据位、停止位等元素的数据帧进行同步。
- 优点: 实现相对简单,设备之间无需共享时钟信号。
- 缺点: 受到时序波动的影响较大,通信速率相对较低。
UART、SPI 和 I2C 的通信方式:
-
UART(通用异步收发器):
- 通信类型: UART 是一种异步通信协议。
- 工作方式: 使用起始位、数据位、停止位的数据帧进行异步通信。
- 适用场景: 适用于点对点通信,例如串口通信。
- 时序关系: 无需时钟信号,因此属于异步通信。
-
SPI(串行外设接口):
- 通信类型: SPI 通常是同步通信,但也可以在某些情况下以异步方式工作。
- 工作方式: 使用主从结构,包含主设备和多个从设备。数据传输通过时钟、主设备选择(Chip Select)等信号同步进行。
- 适用场景: 适用于高速、短距离通信,例如连接外设、传感器等。
- 时序关系: 通常是同步通信,但在某些情况下可以以异步方式工作。
-
I2C(Inter-Integrated Circuit):
- 通信类型: I2C 是同步通信协议。
- 工作方式: 使用主从结构,包含主设备和多个从设备。数据传输通过时钟和数据线同步进行。
- 适用场景: 适用于连接多个设备,例如传感器、存储器等。
- 时序关系: 是同步通信,通过时钟信号同步数据传输。
总体而言,UART 是一种典型的异步通信方式,而 SPI 和 I2C 在许多情况下是同步通信的。选择通信方式取决于具体的应用场景、通信要求和硬件设备的支持。
6.简述通过I2C接口读取设备X的寄存器Y的值的过程
通过 I2C(Inter-Integrated Circuit)接口读取设备 X 的寄存器 Y 的值通常涉及以下步骤:
-
初始化 I2C 总线:
- 配置主设备(通常是微控制器)上的 I2C 控制器,设置通信速率、时钟极性、时钟相位等参数。
- 初始化 I2C 总线,包括设置 SDA(数据线)和 SCL(时钟线)。
-
启动 I2C 总线:
- 主设备产生起始条件(Start Condition),即 SDA 从高电平跳变到低电平时,SCL 为高电平。
- 这表示一个新的 I2C 事务的开始。
-
发送设备地址:
- 主设备发送设备 X 的地址,包括设备地址和读/写位。设备地址通常由厂商指定。
- 如果是读操作,主设备设置读位;如果是写操作,主设备设置写位。
-
等待设备响应:
- 主设备等待从设备 X 发送应答信号(ACK,应答信号)。
-
发送寄存器地址:
- 主设备发送要读取的寄存器 Y 的地址。
-
等待设备响应:
- 主设备再次等待从设备 X 发送应答信号。
-
启动重复开始条件:
- 主设备产生重复开始条件,即 SDA 从低电平跳变到高电平时,SCL 为高电平。
- 这表示新的 I2C 事务的开始。
-
发送设备地址(读操作):
- 主设备再次发送设备 X 的地址,但这次设置读位。
-
等待设备响应:
- 主设备再次等待从设备 X 发送应答信号。
-
接收数据:
- 主设备接收从设备 X 发送的数据,包括寄存器 Y 中的值。
- 主设备发送应答信号或非应答信号,决定是否继续接收数据。
-
停止 I2C 总线:
- 主设备产生停止条件(Stop Condition),即 SDA 从低电平跳变到高电平时,SCL 为高电平。
- 这表示 I2C 事务的结束。
通过这个过程,主设备成功读取了设备 X 中寄存器 Y 的值。在实际应用中,具体的设备地址、寄存器地址、通信协议等信息需要参考设备 X 的数据手册或规格说明。
7.中断是什么?请简述单片机中断处理的过程
中断是什么?
中断是一种机制,用于在计算机或单片机运行时,由硬件或软件触发,暂时中断正常的程序执行,转而去执行一个特定的中断服务程序。中断可以分为外部中断(由外部硬件触发,如按键、定时器)和软件中断(由程序中的特定指令触发)。
单片机中断处理的过程:
-
中断触发:
- 中断可以由硬件或软件触发。硬件触发的中断通常与外部事件(例如按键按下、定时器溢出等)相关。
-
中断请求(IRQ):
- 当中断事件发生时,会引起中断请求,通常是通过特殊的中断请求引脚(IRQ)来实现。
-
中断使能:
- 在单片机中,需要在中断控制寄存器中设置相应的位来使能或禁用中断。
-
CPU 响应中断:
- 当中断请求被允许时,CPU 会检测到中断请求,并在合适的时机响应中断。
-
中断嵌套检测:
- 检测 CPU 是否允许中断嵌套,即在处理一个中断的同时是否可以响应其他更高优先级的中断。
-
保存当前状态:
- 在进入中断服务程序之前,CPU 通常会保存当前的程序计数器和状态寄存器等信息,以便中断服务程序执行完毕后能够正确地返回到原来的程序。
-
中断向量:
- 中断服务程序的入口地址通常存储在中断向量表中。中断向量表是一个存储了中断服务程序入口地址的表格。
-
中断服务程序执行:
- CPU 跳转到中断向量表中相应中断号的地址,开始执行中断服务程序。中断服务程序执行完成后,控制权会返回到主程序。
-
恢复状态:
- 在退出中断服务程序时,CPU 会从保存的状态中恢复原来的程序计数器和状态寄存器等信息。
-
清除中断标志:
- 在处理中断服务程序时,通常需要清除相应的中断标志,以防止重复触发中断。
-
中断结束:
- 执行完中断服务程序后,控制权回到原来的程序,正常的程序继续执行。
总体而言,中断处理过程允许单片机在执行正常程序的同时,对外部事件进行及时响应,提高了系统的实时性和效率。















 1115
1115

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









