







 本文介绍了一种基于HX711芯片的压力检测系统,实现了实时监测压力、蓝牙串口数据传输至手机、独立按键调节报警值等功能。系统采用STC89C52RC单片机、LCD12864显示屏、HC-05蓝牙模块等组件,详细阐述了AD转换原理、程序计算方法及传感器校准过程。
本文介绍了一种基于HX711芯片的压力检测系统,实现了实时监测压力、蓝牙串口数据传输至手机、独立按键调节报警值等功能。系统采用STC89C52RC单片机、LCD12864显示屏、HC-05蓝牙模块等组件,详细阐述了AD转换原理、程序计算方法及传感器校准过程。
HX711压力检测装置,要实现的功能:实时监测当前压力并通过蓝牙串口将数据传输至手机,采用独立按键调节压力报警值,人机交互界面采用LCD12864控制内核为STC89C52RC;接下来我们来说说材料清单控制主板:STC89C52RC最小系统板 LCD12864 蜂鸣器 HC-05蓝牙模块 洞洞板 四个HX711芯片 四个HX711压力传感器在此之前我们还需要学习一下HX711的压力转换,计算相应线性系数以便获取高精度的重量;
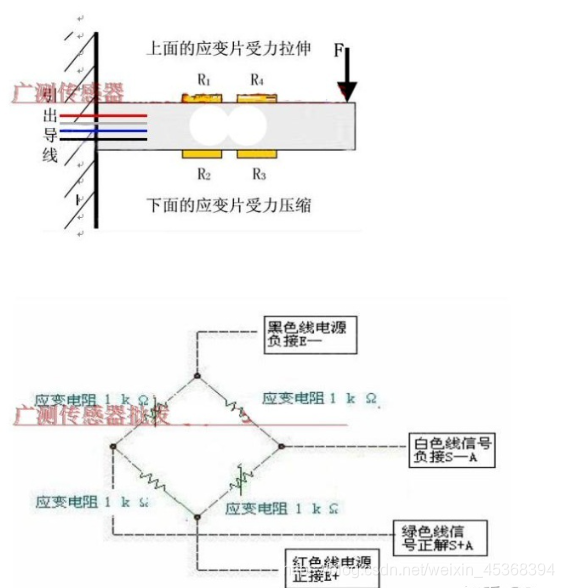
HX711AD模块两个IO口, 分别对应SCK,DOUT。当DOUT=1, 说明ad转换器还没准备好输出数据。当DOUT=0,说明准备好了,然后就得对SCK输入脉冲,且输入一次脉冲,DOUT就输出一位数据(二进制,数据从最高位到最低位依次输出),24个脉冲后,再根据SCK的脉冲数对下次工作方式进行选择。我们选用A通道,128增益。
工作模式的选择HX711AD模块有上图三种工作模式,A通道128增益、B通道32增益、A通道64增益。对应不同的增益,其满额度差分输入信号幅值也不同。(还没学模电数电,不知道这是个什么东东)根据相关的文档以及网上的一些文章,不管选哪个通道的多少增益,其数据处理是类似的,只是不同的增益对应不同的放大倍数。具体到程序编写上,即为两处改动。
详细讲解程序计算原理:
步骤 1 :如何计算传感器供电电压
HX711 可以在产生 VAVDD 和 AGND 电压,即 711 模块上的 E+ 和 E- 电压。该电压通过 VAVDD=VBG(R1 +R2 )/R2 计算。VBG 为模块儿基准电压 1.25v,R1 = 20K,R2 = 8.2K。 因此得出 VAVDD = 4.3V
(为了降低功耗,该电压只在采样时刻才有输出, 因此用万用表读取的值可能低于 4.3v ,因为万用表测量的是有效值。 )
步骤 2 :如何计算 AD 输出最大值
在 4.3V 的供电电压下 5Kg 的传感器最大输出电压是 4.3v1mv/V = 4.3mV
经过 128 倍放大后,最大电压为 4.3mV128 = 550.4mV
经过 AD 转换后输出的24bit数字值最大为:550.4mV*2^ 24 /4.3V ≈ 2147483
步骤 3 :程序中数据如何转换
程序中通过HX711_Buffer = HX711_Read(); 获取当前采样的 AD 值,最大 2147483 ,存放在 long 型变量 HX711_Buffer 中,因 long 型变量计算速率和存放空间占用资源太多,固除以100 ,缩放为 int 型,便于后续计算。
Weight_Shiwu = HX711_Buffer/100;
Weight_Shiwu 最大为 21474 。
步骤 4 :如何将 AD 值反向转换为重力值。
假设重力为 A Kg ,( x<5Kg ) , 测量出来的 AD 值为 y
5Kg 传感器输出,发送给 AD 模块儿的电压为 A Kg * 4.3mV / 5Kg = 0.86A mV
经过 128 倍增益后为 128 * 0.86A = 110.08AmV
转换为 24bit 数字信号为 110.08A mV * 2 ^24 / 4.3V = 429496.7296A
所以 y = 429496.7296A /100 = 4294.967296 A
因此得出 A = (y / 4294.967296) Kg ≈ y / 4.30 g
所以得出程序中计算公式
Weight_Shiwu = (unsigned int)((float)Weight_Shiwu/4.30+0.05);
//+0.05 是为了四舍五入百分位
特别注意:
因为不同的传感器斜率特性曲线不一样,因此,每一个传感器需要矫正这里的 4.30 这个除数。当发现测出来的重量偏大时,增加该数值。如果测试出来的重量偏小时,减小改数值。该数值一般在 4.0-5.0 之间。因传感器线性斜率不同而定。每个传感器都要校准。如果传感器测量值偏大,则需改大该数值,若传感器测量值偏小,则需改小该数值。
使用A通道的arduino程序如下:
/以下为函数声明
extern unsigned long HX711_Read(void);
extern long Get_Weight();
///变量定义
float Weight = 0;
int HX711_SCK =2; /// 作为输出口
int HX711_DT= 3; /// 作为输入口
long HX711_Buffer = 0;
long Weight_Maopi = 0, Weight_Shiwu = 0;
#define GapValue 405 ///该值需校准 每个传感器都有所不同
void setup()
{
//初始化HX711的两个io口
pinMode(HX711_SCK, OUTPUT); ///SCK 为输出口 ---输出脉冲
pinMode(HX711_DT, INPUT); /// DT为输入口 ---读取数据
Serial.begin(9600);
Serial.print("Welcome to use!\n");
delay(3000); ///延时3秒
//获取毛皮重量
Weight_Maopi = HX711_Read();
}
void loop() /// 一直循环{}内容 ----- 同while(1){xxx}
{
Weight = Get_Weight(); //计算放在传感器上的重物重量
Serial.print(float(Weight/1000),3); //串口显示重量,3意为保留三位小数
Serial.print(" kg\n"); //显示单位
Serial.print("\n"); //显示单位
delay(2000); //延时2s 两秒读取一次传感器所受压力
}
//称重函数
long Get_Weight()
{
HX711_Buffer = HX711_Read(); ///读取此时的传感器输出值
Weight_Shiwu = HX711_Buffer; ///将传感器的输出值储存
Weight_Shiwu = Weight_Shiwu - Weight_Maopi; //获取实物的AD采样数值。
Weight_Shiwu = (long)((float)Weight_Shiwu/GapValue); //AD值转换为重量(g)
return Weight_Shiwu;
}
unsigned long HX711_Read(void) //选择芯片工作方式并进行数据读取
{
unsigned long count; ///储存输出值
unsigned char i;
high--高电平 1 low--低电平 0
digitalWrite(HX711_DT, HIGH); digitalWrite作用: DT=1;
delayMicroseconds(1); 延时 1微秒
digitalWrite(HX711_SCK, LOW); digitalWrite作用: SCK=0;
delayMicroseconds(1); 延时 1微秒
count=0;
while(digitalRead(HX711_DT)); //当DT的值为1时,开始ad转换
for(i=0;i<24;i++) ///24个脉冲,对应读取24位数值
{
digitalWrite(HX711_SCK, HIGH); digitalWrite作用: SCK=0;
/// 利用 SCK从0--1 ,发送一次脉冲,读取数值
delayMicroseconds(1); 延时 1微秒
count=count<<1; ///用于移位存储24位二进制数值
digitalWrite(HX711_SCK, LOW); digitalWrite作用: SCK=0;为下次脉冲做准备
delayMicroseconds(1);
if(digitalRead(HX711_DT)) ///若DT值为1,对应count输出值也为1
count++;
}
digitalWrite(HX711_SCK, HIGH); ///再来一次上升沿 选择工作方式 128增益
count ^= 0x800000; //按位异或 不同则为1 0^0=0; 1^0=1;
///对应二进制 1000 0000 0000 0000 0000 0000 作用为将最高位取反,其他位保留原值
delayMicroseconds(1);
digitalWrite(HX711_SCK, LOW); /// SCK=0;
delayMicroseconds(1); 延时 1微秒
return(count); ///返回传感器读取值
}
对于51、stm32等单片机的程序,只需做出简单修改就可。
HX711 AD 转换的计算详细可参考知乎
https://zhuanlan.zhihu.com/p/93838734?utm_source=qq&utm_medium=social&utm_oi=1000773993053503488
知乎,详细AD 转换讲解
接下来我们就进入正题,进行主函数的编程;此次工程用到串口通信、EEPROM存入数值、AD转换以及LCD12864并行通信;
所包含的库函数(自己建立的库函数)
#include <12864.h>
#include <main.h>
#include <HX711.h>
#include <eeprom.h>
#include <USART.h>
#include<reg52.h>
#include <intrins.h>
#include <string.h>
#include <stdio.h>
#include <12864.h>
#include <main.h>
#include <HX711.h>
#include <eeprom.h>
#include <USART.h>
/********************************************************************
*函数名: key_pros()
* 功能 按键扫描
* ???? : ??
* ??? : ??
***********************************************************************/
void key_pros
{
if(K1==0)
{
if(K1==0) //加
{
delay1(100);
if(K1==0)
{
I++;
delay1(100);
if(I>99999){I=50;beep=~beep;delay1(70);beep=1;}
}
while(!K1);
}
}
if(K2==0) //减
{
delay1(100);
if(K2==0)
{
I--;
delay1(100);
if(I<0){I=50;beep=~beep;delay1(70);beep=1;}
}
while(!K2);
}
}
/********************************************************************
* 函数名 : delay()
* 功能 : 延迟100us *t子函数
* ???? : t
* ??? : ??
***********************************************************************/
void delay(unsigned int t)
{
unsigned int p,j;
for(p=0; p<t; p++)
for(j=0; j<10; j++);
}
/********************************************************************
* 函数名 : Timer0_ISR (void) interrupt 1 using 0()
* 功能 : 定时器0中断
* ???? : ??
* ??? : ??
***********************************************************************/
void Timer0_ISR (void) interrupt 1 using 0
{
uchar Counter;
TL0 = 0xb0;
TH0 = 0x3c; //???????????
Counter ++;//?0.5???????????
if (Counter >= 10)
{
FlagTest = 1;
Counter = 0;
}
}
/******************把数据保存到eeprom******************/
void write_eeprom()
{
SectorErase(0x1000);
GapValue1=GapValue&0x00ff;
byte_write(0x2000, GapValue1);
GapValue1=(GapValue&0xff00)>>8;
byte_write(0x2001, GapValue1);
byte_write(0x2060, a_a);
}
/******************读取数据从eeprom中*****************/
void read_eeprom()
{
GapValue = byte_read(0x2001);
GapValue = (GapValue<<8)|byte_read(0x2000);
a_a = byte_read(0x2060);
}
/***************开机自检初始化****************/
void init_eeprom()
{
read_eeprom(); //先读
if(a_a != 1)
{
GapValue = 210;
a_a = 1;
write_eeprom(); //保存
}
}
/********************************************************************
* 函数名 : keydat()
* 功能 : 报警键值
* ???? : ??
* ??? : ??
***********************************************************************/
void keydata()
{
int m;
for(m=0;m<5;m++)
{
if(m==0)
TX[7]=I/10000+0x30; //数据处理对应ASCII
else if(m==1)
TX[8]=I/10000%1000+0x30;
else if(m==2)
TX[9]=I%1000/100+0x30;
else if(m==3)
TX[10]=I%100/10+0x30;
else
TX[11]=I%10+0x30;
}
}
/********************************************************************
* 函数名: Test()
* 功能 : 显示子函数
* ???? : ??
* ??? : ??
***********************************************************************/
void Test()
{
LCD12864_COM_Write(0x80); //设置指针
LCD12864_write_word(" PRESSURE"); //显示内容
LCD12864_COM_Write(0x90); //设置指针
LCD12864_write_word(pro1); //显示内容
LCD12864_COM_Write(0x88); //设置指针
LCD12864_write_word(pro); //显示内容
LCD12864_COM_Write(0x98); //设置指针
LCD12864_write_word(TX); //显示内容
}
/********************************************************************
* 函数名: TEST1()
* 功能 : 开机画面
* ???? : ??
* ??? : ??
***********************************************************************/
void TEST1()
{
LCD12864_COM_Write(0x80); //设置指针
LCD12864_write_word(" PRESSURE"); //显示内容?
LCD12864_COM_Write(0x90); //设置指针
LCD12864_write_word(" 压力检测"); //显示内容
LCD12864_COM_Write(0x88); //设置指针
LCD12864_write_word("Welcome to use"); //显示内容
LCD12864_COM_Write(0x98); //设置指针
LCD12864_write_word(" 欢迎使用"); //显示内容
}
/********************************************************************
* 函数名: TEST1()
* 功能 : 清屏函数
* ???? : ??
* ??? : ??
***********************************************************************/
void TEST0()
{
LCD12864_COM_Write(0x80); //设置指针
LCD12864_write_word(" ");
LCD12864_COM_Write(0x90); //设置指针
LCD12864_write_word(" ");
LCD12864_COM_Write(0x88); //设置指针
LCD12864_write_word(" ");
LCD12864_COM_Write(0x98); //设置指针
LCD12864_write_word(" ");
}
/********************************************************************
* 函数名: datat()
* 功能 : 实际重量转换 存放数组
* ???? : ??
* ??? : ??
***********************************************************************/
void datat()
{
pro1[2] = Weight_Shiwu1/10000 + 0X30;
pro1[3] = Weight_Shiwu1/10000%1000 + 0X30;
pro1[4] = Weight_Shiwu1%1000/100 + 0X30;
pro1[5] = Weight_Shiwu1%100/10 + 0X30;
pro1[6] = Weight_Shiwu1%10 + 0x30;
pro1[7]='g';
pro1[10] = Weight_Shiwu2/10000 + 0X30;
pro1[11] = Weight_Shiwu2/10000%1000 + 0X30;
pro1[12] = Weight_Shiwu2%1000/100 + 0X30;
pro1[13] = Weight_Shiwu2%100/10 + 0X30;
pro1[14] = Weight_Shiwu2%10 + 0x30;
pro1[15]='g';
pro[2] = Weight_Shiwu/10000 + 0X30;
pro[3] = Weight_Shiwu/10000%1000 + 0X30;
pro[4] = Weight_Shiwu%1000/100 + 0X30;
pro[5] = Weight_Shiwu%100/10 + 0X30;
pro[6] = Weight_Shiwu%10 + 0x30;
pro[7]='g';
pro[10] = Weight_Shiwu3/10000 + 0X30;;
pro[11] = Weight_Shiwu3/10000%1000 + 0X30;
pro[12] = Weight_Shiwu3%1000/100 + 0X30;
pro[13] = Weight_Shiwu3%100/10 + 0X30;
pro[14] = Weight_Shiwu3%10 + 0X30;
pro[15]='g';
pro[18]='\r';
pro[19]='\n'; //串口显示换行
}
/********************************************************************
* 函数名: send()
* 功能 : 串口发送函数
* ???? : ??
* ??? : ??
***********************************************************************/
void send()
{
int G;
for(G=0;G<16 ;G++)
{
SBUF=pro1[G];
delay1(20); //等待发送完毕
}
for(G=0;G<20 ;G++)
{
SBUF=pro[G];
delay1(20); //等待发送完毕
}
}
/********************************************************************
*函数名: Main()
* 功能 : 主函数
* ???? : ??
* ??? : ??
***********************************************************************/
void Main()
{
init_eeprom(); //初始化eeprom
Init();
LCD12864_Reset(); //液晶初始化
LCD12864_HAIZI_SET(); //设计为普通模式
TEST1(); //开机画面
Delay_ms1(1000); //等待
Get_Maopi(); //获取毛皮重量
Delay_ms1(100); //等待
Get_Maopi(); //获取毛皮重量
Delay_ms1(100); //等待
Get_Maopi(); //获取毛皮重量
Delay_ms1(100); //等待
Get_Maopi(); //获取毛皮重量多获取几次,数值更加精确
TEST0();
while(1)
{
key_pros(); //按键检测
keydata(); //键值处理
Delay_ms1(100); //等待
Get_Weight(); //和获取重量
datat(); //数据存放
send(); //发送至串口
Test(); //LCD12864显示
delay(30); //等待显示完全
}
}
/********************************************************************
* 函数名: Get_Weight()
* 功能 :获取重量及报警
* ???? : ??
* ??? : ??
***********************************************************************/
void Get_Weight()
{
Weight_Shiwu = HX711_Read00();
Weight_Shiwu = Weight_Shiwu - Weight_Maopi; //获取1净重
Weight_Shiwu1 = HX711_Read01();
Weight_Shiwu1 = Weight_Shiwu1 - Weight_Maopi1; //获取2净重
Weight_Shiwu2 = HX711_Read02();
Weight_Shiwu2 = Weight_Shiwu2 - Weight_Maopi2; //获取3净重
Weight_Shiwu3 = HX711_Read03();
Weight_Shiwu3 = Weight_Shiwu3 - Weight_Maopi3; //获取4净重
if(Weight_Shiwu > 0||Weight_Shiwu1 > 0||Weight_Shiwu2 > 0||Weight_Shiwu3 > 0)
{
Weight_Shiwu = (unsigned int)((float)Weight_Shiwu/GapValue); //计算实际重量1
Weight_Shiwu1 = (unsigned int)((float)Weight_Shiwu1/GapValue); //计算实际重量2
Weight_Shiwu2 = (unsigned int)((float)Weight_Shiwu2/GapValue); //计算实际重量3
Weight_Shiwu3 = (unsigned int)((float)Weight_Shiwu3/GapValue); //计算实际重量4
if(Weight_Shiwu > I||Weight_Shiwu1 > I||Weight_Shiwu2 > I||Weight_Shiwu3 > I) //判断是否超出键值 选择报警
{
beep = 0;
}
else
{
beep = 1;
}
}
else
{
Weight_Shiwu = 0;
Weight_Shiwu1 = 0;
Weight_Shiwu2 = 0;
Weight_Shiwu3 = 0;
}
}
/********************************************************************
* 函数名 : Get_Maopi()
* 功能 : 获取毛皮
* ???? : ??
* ??? : ??
***********************************************************************/
void Get_Maopi()
{
Weight_Maopi = HX711_Read00();
Weight_Maopi1 = HX711_Read01();
Weight_Maopi2 = HX711_Read02();
Weight_Maopi3 = HX711_Read03();
}
/********************************************************************
* 函数名 : Delay_ms1(unsigned int n)
* 功能 : MS延迟(12M晶振下)
* ???? : ??
* ??? : ??
***********************************************************************/
void Delay_ms1(unsigned int n)
{
unsigned int i,j;
for(i=0;i<n;i++)
for(j=0;j<123;j++);
}
MAIN.h
#ifndef __MAIN_H__
#define __MAIN_H__
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
typedef unsigned char U8;
typedef unsigned int U16;
sbit beep=P1^0;
sbit K1=P2^0; //+
sbit K2=P2^1; //-
int I=50;
unsigned char a=12;
U8 pro[]={"3: 4:"};
U8 pro1[]={"1: 2:"};
U8 TX[]={"报警值 g"};
U8 count, count_r=0;
uint GapValue,GapValue1;
volatile bit ClearWeighFlag = 0; //????????????λ?????0?
volatile bit FlagTest = 0; //????????????0.5????λ????????0
unsigned long Weight_Maopi = 0;// ???1???
unsigned long Weight_Maopi_0 = 0;
unsigned long Weight_Maopi1 = 0;//???2???
unsigned long Weight_Maopi_1 = 0;
unsigned long Weight_Maopi2 = 0;//???2???
unsigned long Weight_Maopi3 = 0;//???2???
unsigned int qupi=0;
long Weight_Shiwu = 0;
long Weight_Shiwu1 = 0;
long Weight_Shiwu2 = 0;
long Weight_Shiwu3= 0;
extern void Delay_ms1(unsigned int n);
extern void Get_Maopi();
//extern void Get_Maopi1();
extern void Get_Weight();
//extern void Get_Weight1();
void key_pros();
void Delay_ms1(unsigned int n);
接下来展示一下自己编写的库函数,由于代码过多就不会展示.h文
件,只要在.h文件中
#ifndef HX711_H
#define _HX711_H_在这里定义自己的库函数名称,包含进去就行,就是套公式啦
…
…
… 在中间声明一下自己的写的函数就好
…
#endif 再来个结尾就结束啦 这大概就.h文件编写的要求,就类似于公式,套进去就好
蓝牙串口
#include<USART.h>
void delay1(int xms)
{
int m,n;
for(m=xms;m>=0;m--)
for(n=110;n>=0;n--);
}
void Init()
{
ES=0;
SCON = 0x50; //工作方式1 设置波特率9600bps 允许接收
TMOD = 0x20; //定时器T1选择工作方式2
TH1=TL1=0xFD;
PCON &= 0x7f;
TR1 = 1; // 开启计时器
TI = 0;
RI = 0;
ES = 1;
EA = 1; // 打开总中断
}
void Timer0_Init()
{
ET0 = 1; //????????0?ж?
TMOD = 1; //???????????????
TL0 = 0xb0;
TH0 = 0x3c; //???????????
TR0 = 1; //????????
}
12864.c
#include "12864.H"
void LCD12864_WaitIdle()
{
unsigned char i;
LCD12864_DA_PORT = 0xff;
LCD12864_RS_PORT = 0;
LCD12864_RW_PORT = 1;
LCD12864_E_PORT = 1;
while((LCD12864_DA_PORT&0x80)==1); /*???BF ???1*/
LCD12864_E_PORT = 0;
for(i=0;i<5;i++);
}
void LCD12864_COM_Write( unsigned char com_da)
{
LCD12864_WaitIdle();
LCD12864_RS_PORT = 0;
LCD12864_RW_PORT = 0;
LCD12864_DA_PORT = com_da;
LCD12864_E_PORT = 1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
LCD12864_E_PORT = 0;
}
void LCD12864_NoWaitIdle_COM_Write(unsigned char com_da)
{
LCD12864_RS_PORT = 0;
LCD12864_RW_PORT = 0;
LCD12864_DA_PORT = com_da;
LCD12864_E_PORT = 1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
LCD12864_E_PORT = 0;
}
void LCD12864_Data_Write(unsigned char da)
{
LCD12864_WaitIdle(); /*???????*/
LCD12864_RS_PORT = 1;
LCD12864_RW_PORT = 0;
LCD12864_DA_PORT = da;
LCD12864_E_PORT = 1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
LCD12864_E_PORT = 0;
}
void LCD12864_write_word(unsigned char *s)
{
while(*s>0)
{
LCD12864_Data_Write(*s);
s++;
}
}
void lcd_delay_ms(unsigned char x)
{
unsigned char j;
while(x--){
for(j=0;j<125;j++)
{;}
}
}
void LCD12864_Reset()
{
lcd_delay_ms(100); /*????????LCD?????λ???*/
LCD12864_NoWaitIdle_COM_Write(0x30); /*???8λ??????*/
lcd_delay_ms(10);
LCD12864_NoWaitIdle_COM_Write(0x30); /*???8λ??????*/
lcd_delay_ms(10);
LCD12864_NoWaitIdle_COM_Write(0x0c); /*??????????????*/
lcd_delay_ms(10);
LCD12864_NoWaitIdle_COM_Write(0x01); /*???????*/
lcd_delay_ms(30);
LCD12864_NoWaitIdle_COM_Write(0x06); /*DDRAM????????????AC????1*/
lcd_delay_ms(30);
}
void LCD12864_HAIZI_SET()
{
LCD12864_COM_Write(0x30);
lcd_delay_ms(10);
LCD12864_COM_Write(0x30);
lcd_delay_ms(10);
}
void Delay_ms(unsigned int n)
{
unsigned int i,j;
for(i=0;i<n;i++)
for(j=0;j<123;j++);
}
HX711.c
#include <HX711.h>
void Delay__hx711_us(void)
{
_nop_();
_nop_();
}
unsigned long HX711_Read00(void) //????128
{
unsigned long count;
unsigned char i;
HX711_DOUT00=1;
Delay__hx711_us();
HX711_SCK00=0;
count=0;
while(HX711_DOUT00);
for(i=0;i<24;i++)
{
HX711_SCK00=1;
count=count<<1;
HX711_SCK00=0;
if(HX711_DOUT00)
count++;
}
HX711_SCK00=1;
count=count^0x800000;//??25???????????????????????
Delay__hx711_us();
HX711_SCK00=0;
return(count);
}
unsigned long HX711_Read01(void) //????128
{
unsigned long count;
unsigned char i;
HX711_DOUT01=1;
Delay__hx711_us();
HX711_SCK01=0;
count=0;
while(HX711_DOUT01);
for(i=0;i<24;i++)
{
HX711_SCK01=1;
count=count<<1;
HX711_SCK01=0;
if(HX711_DOUT01)
count++;
}
HX711_SCK01=1;
count=count^0x800000;//??25???????????????????????
Delay__hx711_us();
HX711_SCK01=0;
return(count);
}
unsigned long HX711_Read02(void) //????128
{
unsigned long count;
unsigned char i;
HX711_DOUT02=1;
Delay__hx711_us();
HX711_SCK02=0;
count=0;
while(HX711_DOUT02);
for(i=0;i<24;i++)
{
HX711_SCK02=1;
count=count<<1;
HX711_SCK02=0;
if(HX711_DOUT02)
count++;
}
HX711_SCK02=1;
count=count^0x800000;//??25???????????????????????
Delay__hx711_us();
HX711_SCK02=0;
return(count);
}
unsigned long HX711_Read03(void) //????128
{
unsigned long count;
unsigned char i;
HX711_DOUT03=1;
Delay__hx711_us();
HX711_SCK03=0;
count=0;
while(HX711_DOUT03);
for(i=0;i<24;i++)
{
HX711_SCK03=1;
count=count<<1;
HX711_SCK03=0;
if(HX711_DOUT03)
count++;
}
HX711_SCK03=1;
count=count^0x800000;//??25???????????????????????
Delay__hx711_us();
HX711_SCK03=0;
return(count);
}
接下来要动动我们的小手来准备搭建电路啦;好了这篇文章就和大家分享到这里
谢谢 有不对的望大佬们指正
本次做的压力报警完工,代码以测试,运行平稳



















 3017
3017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









