







LeetCode 面试题 08.02. 迷路的机器人
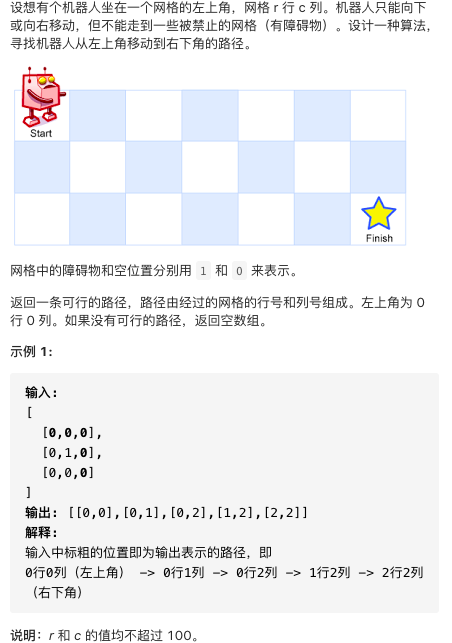
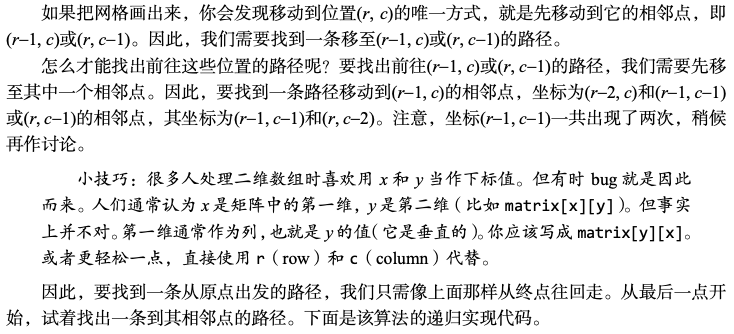
题目
解题
解题一:DFS + 剪枝
// javascript
var pathWithObstacles = function(obstacleGrid) {
if (obstacleGrid.length === 0 || obstacleGrid[0].length === 0) return [];
let path = [];
if (getPath(obstacleGrid, path, obstacleGrid.length - 1, obstacleGrid[0].length - 1) === true) {
return path;
}
return [];
};
var getPath = function(obstacleGrid, path, row, col) {
// 如果越界或无效,则直接返回
if (row < 0 || col < 0 || obstacleGrid[row][col] === 1) return false;
let isAtOrigin = (row === 0) && (col === 0);
if (isAtOrigin || getPath(obstacleGrid, path, row - 1, col) || getPath(obstacleGrid, path, row, col - 1)) {
// 如果有一条路径从起点通向这里,把它添加到我的位置
path.push([row, col]);
return true;
}
return false;
}
// javascript
var pathWithObstacles = function(obstacleGrid) {
if (obstacleGrid.length === 0 || obstacleGrid[0].length === 0) return [];
let path = [],
rows = obstacleGrid.length - 1,
cols = obstacleGrid[0].length - 1;
if (getPath(obstacleGrid, path, rows, cols) === true) {
return path;
}
return [];
};
var getPath = function(obstacleGrid, path, row, col) {
if (row < 0 || col < 0 || obstacleGrid[row][col] === 1) return false;
obstacleGrid[row][col] = 1; // 就加了这一句,表示已经 visited
let isAtOrigin = (row === 0) && (col === 0);
if (isAtOrigin || getPath(obstacleGrid, path, row - 1, col) || getPath(obstacleGrid, path, row, col - 1)) {
path.push([row, col]);
return true;
}
return false;
}
仅加一句:obstacleGrid[row][col] = 1;,上面直接在 obstacleGrid 上进行了修改,如果不想改变改变数组,可以额外创建一个 visited 数组 或者 Set() 来记录。注意:
let visited = new Set();
visited.add([0, 0]);
visited.has([0, 0]); // false
visited.add(0 + '-' + 0);
visited.has(0 + '-' + 0); // true
解题二:回溯法
// javascript
let rows, cols;
var pathWithObstacles = function(obstacleGrid) {
if (obstacleGrid.length === 0 || obstacleGrid[0].length === 0) return []; // 空网格
rows = obstacleGrid.length;
cols = obstacleGrid[0].length;
if (obstacleGrid[rows - 1][cols - 1] === 1) return []; // 终点有障碍
let path = [], visited = new Array(rows).fill(false).map(arr => new Array(cols).fill(false));
backTrack(obstacleGrid, 0, 0, path, visited);
return path;
};
var backTrack = function(obstacleGrid, row, col, path, visited) {
// 越界,有障碍,已访问
if (row >= rows || col >= cols || obstacleGrid[row][col] === 1 || visited[row][col] === true)
return false;
visited[row][col] = true;
path.push([row, col]);
let isAtDes = (row === rows - 1) && (col === cols - 1); // 是否到达终点
// 到达终点 或 向下能到达终点 或 向右能到达终点
if (isAtDes === true ||
backTrack(obstacleGrid, row + 1, col, path, visited) === true ||
backTrack(obstacleGrid, row, col + 1, path, visited) === true)
return true;
// 既不能向下也不能向右,是个死胡同,撤销选择
path.pop();
return false;
}
比较 解题一和二,可以发现从终点往回寻找路径的代码会更加简单。
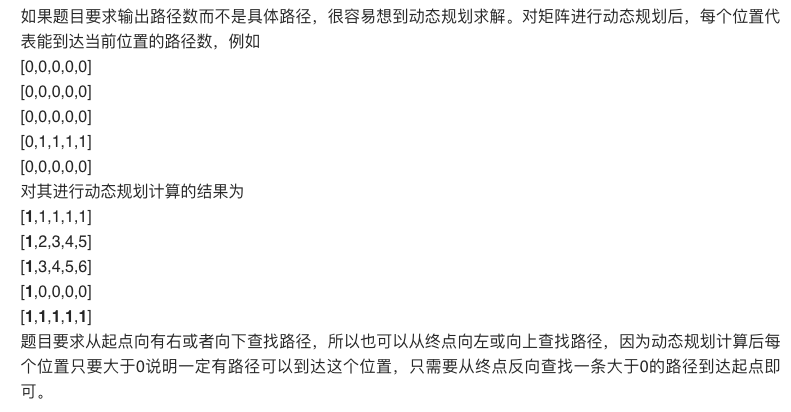
解题三:动态规划
// javascript
var pathWithObstacles = function(obstacleGrid) {
if (obstacleGrid.length == 0 || obstacleGrid[0].length == 0) return [];
let path = [],
rows = obstacleGrid.length,
cols = obstacleGrid[0].length;
// 如果是 1,有障碍物,有 0 条路能到 [0, 0]
// 如果是 0,无障碍物,有 1 条路能到 [0, 0]
obstacleGrid[0][0] ^= 1;
for (let i = 1; i < cols; i++) {
// 如果是 1,有障碍物,有 0 条路能到 [0, i]
// 如果是 0,无障碍物,参照 [0, i-1] 的路径数,因为在第一行,仅能从左边到达
obstacleGrid[0][i] = obstacleGrid[0][i] == 1 ? 0 : obstacleGrid[0][i - 1];
}
for (let i = 1; i < rows; i++) {
obstacleGrid[i][0] = obstacleGrid[i][0] == 1 ? 0 : obstacleGrid[i - 1][0];
for (let j = 1; j < cols; j++) {
obstacleGrid[i][j] = obstacleGrid[i][j] == 1 ? 0 : obstacleGrid[i - 1][j] + obstacleGrid[i][j - 1];
}
}
// 如果 [rows - 1, cols - 1] 可到达,那么去寻找 path
if (obstacleGrid[rows - 1][cols - 1] > 0) {
getPath(obstacleGrid, path, rows - 1, cols - 1);
}
return path;
};
var getPath = function(obstacleGrid, path, row, col) {
path.unshift([row, col]);
if (row > 0 && obstacleGrid[row - 1][col] > 0)
getPath(obstacleGrid, path, row - 1, col);
else if (col > 0 && obstacleGrid[row][col - 1] > 0)
getPath(obstacleGrid, path, row, col - 1);
}
时间复杂度: O ( r ∗ c ) O(r * c) O(r∗c),空间复杂度: O ( r + c ) O(r + c) O(r+c)。
如果额外构建一个 dp 数组来存储,空间复杂度是 O ( r ∗ c ) O(r * c) O(r∗c)。















 354
354











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









