








点击上方蓝字关注我们

基于城市交通监控大数据的行程时间估计
李文明1, 刘芳1, 吕鹏1, 于彦伟2
1 烟台大学计算机与控制工程学院,山东 烟台 264005
2 中国海洋大学计算机科学与技术系,山东 青岛 266100
摘要:随着智慧交通的发展,越来越多的监控摄像头被安装在城市道路路口,这使得利用城市交通监控大数据进行车辆行程时间估计和路径查询成为可能。针对城市出行的行程时间估计问题,提出一种基于城市交通监控大数据的行程时间估计方法UTSD。首先,将交通监控摄像头映射到城市路网,并根据交通监控数据记录构建有向加权的城市路网图;然后,针对行程时间估计,构建时空索引和反向索引结构,时空索引用于快速检索所有车辆的摄像头记录,反向索引用于快速获取每辆车辆的行程时间和经过的摄像头轨迹,这两个索引大大提升了数据查询和行程时间估计的效率;最后,基于构建的索引,给出一种有效的行程时间估计和路径查询方法,根据出发时间、出发地和目的地,在时空索引结构上匹配出发地与目的地共有的车辆,再利用反向索引,快速获得行程时间估计与车辆路线。使用某省会城市的真实交通监控大数据进行实验评估,所提方法UTSD的准确率比基于有向图的Dijkstra最短路径算法和百度算法分别提高了65.02%和40.94%,且UTSD在以7天监控数据作为历史数据的情况下,平均查询时间低于0.3 s,验证了所提方法的有效性和高效性。
关键词: 城市交通监控大数据 ; 时空索引结构 ; 行程时间估计 ; 路线推荐

论文引用格式:
李文明, 刘芳, 吕鹏, 等. 基于城市交通监控大数据的行程时间估计[J]. 大数据, 2021, 7(1): 107-123.
LI W M, LIU F, LV P, et al. Travel time estimation based on urban traffic surveillance data[J]. Big Data Research, 2021, 7(1): 107-123.

1 引言
近年来,城市的快速发展,城市内的车辆数量不断增加,导致了交通拥堵、交通事故频发等一系列的交通问题。在这种环境下,如何提高日常生活中的城市出行效率成为出行用户的首要考虑问题,而作为交通服务中的一项基础功能,路径规划为人们尤其是不熟悉路况的人提供了重要的出行路线参考。在移动互联的大数据时代,大数据、人工智能、云计算、物联网、智能终端等先进技术的不断发展,为综合交通的一体化、智能化、智慧化发展提供了坚实的资源和技术支撑。城市交通中的车辆路径查询和行程时间估计一直是交通行业的热门问题,目前的大部分路线推荐方法利用车辆的GPS轨迹数据进行车辆的路线规划以及行程时间估计。而随着城市交通以及智慧交通的发展,越来越多的监控摄像头被安装在城市道路路口,以实时监控城市的交通状况,这些智能化的监控摄像头可以实时记录路口车辆的各种信息,如车牌号、经过时间以及行驶方向等。因此,无论车辆是否装有GPS等定位设备,相关人员都能够通过城市的交通监控系统获取整个城市所有车辆的行驶轨迹信息。利用城市交通监控中的摄像头数据进行城市出行路线规划和行程时间估计成为可能。
虽然城市交通监控系统的部署正在逐步完善,但是其安装和维护的成本等问题使得交通监控摄像头的数量及其覆盖的范围仍然有限。此外,交通监控数据是通过固定部署的监控摄像头获得的,观察到的车辆轨迹数据并不是完整的车辆行驶轨迹。因此利用交通监控摄像头的车辆数据进行查询时,会遇到以下3个挑战。
● 查询效率问题:路径推荐和时间估计是从某个范围区域内所有监控摄像头的车辆历史数据中查找车辆行驶轨迹和时间,涉及的数据规模非常大;此外,城市出行一般为即时查询,对查询效率有较高的要求。如果不能在短时间内对海量数据进行查询处理,就无法实时得到查询结果,失去了城市出行的行程时间估计的意义。如何提高查询效率是使用交通监控大数据进行查询的一个亟待解决的问题。
●路线选择问题:在实际生活中,车辆并不总是简单地从起始点出发,直接到达结束点,而是存在多条可能的轨迹路线。例如,车辆可能在行驶过程中停留,导致实际行程时间增加。如图1(a)所示,对于同样的起始点A和结束点B,3条轨迹(T1、T2、T3)花费的时间不同,其中T1为正常行驶轨迹,花费300 s;T3由于绕行,花费了600 s。由此可知,并不是任意两个点之间都存在直接路线。在T2和T1轨迹长度相近的情况下, T2的行驶时间为600 s,耗费的时间远大于T1,这很可能是T2的车辆在中途停留,导致行程时间增加。此外,车辆在不同的时间从相同的起始点到相同的结束点花费的时间也可能不同,这与对应路段的道路拥堵程度、交通事故情况以及其他的交通因素有关。在图1(b)中,对于同样的起始点A和结束点B以及相同的轨迹路线,在8:00出发比在11:00出发需要的行程时间更长。在11:00,从A点到B点,T1和T2的行程时间均为300 s;而在8:00,从A点到B点,T3和T4的行程时间分别为400 s和350 s,所花费的时间比11:00时更长。这很可能是因为人们大多集中在8:00去上班,道路拥堵,导致行程时间变长。
● 噪声问题:由于一些原因,交通监控摄像头获取到的车辆轨迹信息会存在较多噪声。例如,在雾天或雨天,车牌号码识别不准确,导致车辆信息错误;部分摄像头因为故障没有记录到经过该路段的车辆信息,使得收集的车辆轨迹信息与车辆的真实轨迹不一致或车辆轨迹信息缺失等。
为了解决上述挑战,本文将城市道路路口的摄像头数据和聚类后的城市路网数据结合,将摄像头和车辆的轨迹信息匹配到城市路网中对应的路口上,形成路网数据库和摄像头数据库,包括摄像头的位置、编号,以及车辆ID、经过时间等数据。然后结合R树索引[3]构建时空索引和反向索引结构,时空索引用来根据位置信息和出发时间进行摄像头数据库的查询,反向索引用来快速获取每辆车辆的摄像头轨迹路线和行程时间。两种索引极大地提高了查询效率。当给定出发地和目的地位置信息及出发时间后,将查询位置信息与距其最近的摄像头进行匹配,对该摄像头及其所在路口摄像头的数据进行查询。根据摄像头的监控数据可以得到出发地和目的地所含有的共同车辆ID,再根据车辆ID利用反向索引得到其经过的摄像头编号和时间信息,经过时间排序,可以得到车辆的推荐路线和行程时间。
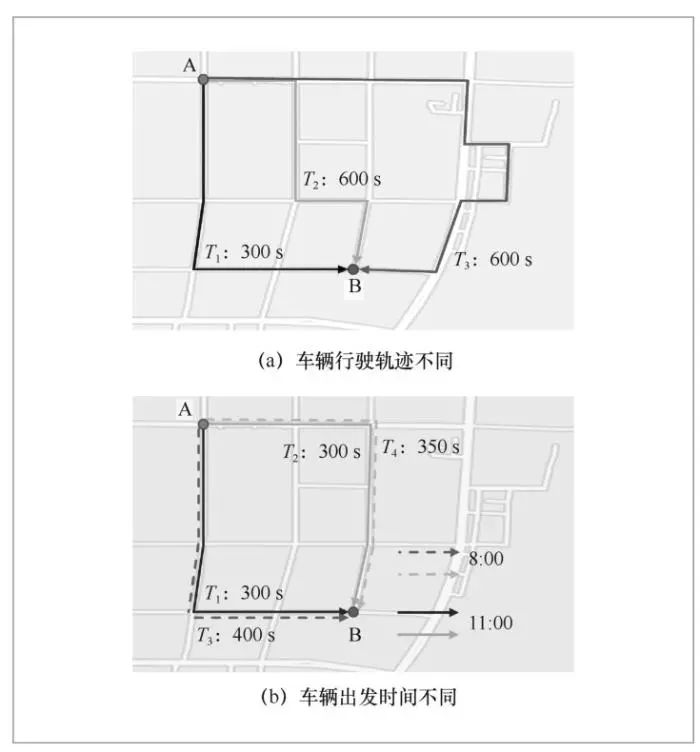
图1 车辆出行的不同情况
综上所述,本文主要贡献总结如下:
● 本文提出了一种基于城市交通监控大数据的行程时间估计方法UTSD,可以实时进行城市出行的路线推荐和行程时间估计;
● 通过对城市监控摄像头数据构建时空索引和反向索引,加快车辆行驶轨迹的查询速度,从而快速得到车辆轨迹信息和对应的行程时间,极大地提高了监控大数据查询和行程时间估计的效率;
● 在某省会城市的真实交通监控摄像头数据上的实验结果验证了本文方法的有效性,相比对比算法,本文方法的性能有显著的提升。
2 相关工作
与本文相关的前期工作可以分为两类:时空数据管理和车辆行程时间估计。
2.1 时空数据管理
近年来,位置感知传感器在GPS、4G、5G网络等的应用中迅速普及,随着时间的推移,这些应用会产生大量的位置数据,这就需要合适的索引结构来实现对如此大的位置数据集的高效查询与处理。G树索引在路网结构中应用较多,可以对路网进行有效的k近邻搜索。R树被广泛应用于二维数据的索引。同时,R树也可以将时间作为第三维度,变成三维R树(3DRtree),如时空R树(STR-tree)和轨迹束树(TB-tree)。而三维R树通过将时间维度划分为多个时间间隔,并链接到相应的空间索引,又衍生出多个版本的R树,如历史R树(HR-tree)。此外,还有一些基于网格的索引,
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









