







 本文详细介绍了图的基本概念,包括有向图、无向图、简单图、多重图、完全图、连通图、强连通图、生成树、生成森林、顶点的度、入度和出度等。还探讨了图的存储结构,如邻接矩阵、邻接表、十字链表和邻接多重表,并阐述了它们各自的特点和适用场景。最后,列举了图的基本操作,如添加和删除顶点与边,以及图的遍历算法。
本文详细介绍了图的基本概念,包括有向图、无向图、简单图、多重图、完全图、连通图、强连通图、生成树、生成森林、顶点的度、入度和出度等。还探讨了图的存储结构,如邻接矩阵、邻接表、十字链表和邻接多重表,并阐述了它们各自的特点和适用场景。最后,列举了图的基本操作,如添加和删除顶点与边,以及图的遍历算法。
图
图的基本概念
图 G {\rm G} G 由顶点集 V {\rm V} V 和边集 E {\rm E} E 组成,记为 G = ( V , E ) {\rm G=(V,E)} G=(V,E) ,其中 V ( G ) {\rm V(G)} V(G) 表示图 G {\rm G} G 中顶点的有限非空集; E ( G ) {\rm E(G)} E(G) 表示图 G {\rm G} G 中顶点之间的关系(边)集合。若 V = { v 1 , v 2 , … , v n } {\rm V= \{ v_1,v_2,\dots,v_n \} } V={v1,v2,…,vn} ,则用 ∣ V ∣ {\rm \left | V \right | } ∣V∣ 表示图 G {\rm G} G 中顶点的个数, E = { ( u , v ) ∣ u ∈ V , v ∈ V } {\rm E=\{ (u,v) | u \in V , v \in V \}} E={(u,v)∣u∈V,v∈V},用 ∣ E ∣ {\rm \left | E \right | } ∣E∣ 表示图 G {\rm G} G 中边的条数。
注意:线性表可以是空表,树可以是空树,但图不可以是空图。就是说,图中不能一个顶点也没有,图的顶点集 V {\rm V} V —定非空,但边集 E {\rm E} E 可以为空,此时图中只有顶点而没有边。
下面是图的一些基本概念及术语。
1.有向图
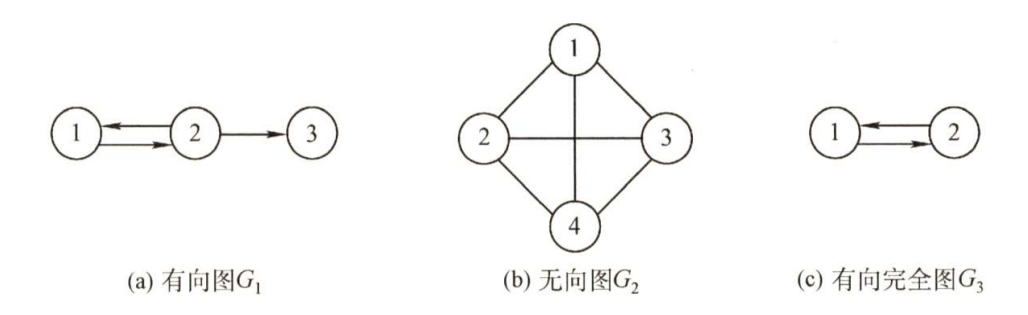
若 E {\rm E} E 是有向边(也称弧)的有限集合时,则图 G {\rm G} G 为有向图。弧是顶点的有序对,记为 < v , w > {\rm <v,w>} <v,w> ,其中 v , w {\rm v,w} v,w 是顶点, v {\rm v} v 称为弧尾, w {\rm w} w 称为弧头, < v , w > {\rm <v,w>} <v,w> 称为从 v {\rm v} v 到 w {\rm w} w 的弧,也称 v {\rm v} v 邻接到 w {\rm w} w 。
上图(a)所示的有向图
G
1
{\rm G_1}
G1 可表示为:
G
1
=
(
V
1
,
E
1
)
V
1
=
{
1
,
2
,
3
}
E
1
=
{
<
1
,
2
>
,
<
2
,
1
>
,
<
2
,
3
>
}
{\rm G_1=(V_1,E_1)} \\ {\rm V_1}=\{ 1,2,3 \} \\ {\rm E_1=\{ <1,2>,<2,1>,<2,3> \} }
G1=(V1,E1)V1={1,2,3}E1={<1,2>,<2,1>,<2,3>}
2.无向图
若 E {\rm E} E 是无向边(简称边)的有限集合时,则图 G {\rm G} G 为无向图。边是顶点的无序对,记为 ( v , w ) {\rm (v,w)} (v,w) 或 ( w , v ) {\rm (w,v)} (w,v) 。可以说 w {\rm w} w 和 v {\rm v} v 互为邻接点。边 ( v , w ) {\rm (v,w)} (v,w) 依附于 w {\rm w} w 和 v {\rm v} v ,或称边 ( v , w ) {\rm (v,w)} (v,w) 和 v , w {\rm v,w} v,w 相关联。
上图(b)所示的无向图
G
2
{\rm G_2}
G2 可表示为:
G
2
=
(
V
2
,
E
2
)
V
2
=
{
1
,
2
,
3
,
4
}
E
2
=
{
(
1
,
2
)
,
(
1
,
3
)
,
(
1
,
4
)
,
(
2
,
3
)
,
(
2
,
4
)
,
(
3
,
4
)
}
{\rm G_2=(V_2,E_2)} \\ {\rm V_2}=\{ 1,2,3,4 \} \\ {\rm E_2=\{ (1,2),(1,3),(1,4),(2,3),(2,4),(3,4) \}}
G2=(V2,E2)V2={1,2,3,4}E2={(1,2),(1,3),(1,4),(2,3),(2,4),(3,4)}
3.简单图、多重图
一个图
G
{\rm G}
G 如果满足:
1)不存在重复边;
2)不存在顶点到自身的边。
那么称图
G
{\rm G}
G 为简单图。 上图中
G
1
{\rm G_1}
G1 和
G
2
{\rm G_2}
G2 均为简单图。若图
G
{\rm G}
G 中某两个顶点之间的边数大于1条,又允许顶点通过一条边和自身关联,则称图
G
{\rm G}
G 为多重图。多重图和简单图的定义是相对的。数据结构中仅讨论简单图。
4.完全图(也称简单完全图)
对于无向图,
∣
E
∣
{\rm \left | E \right | }
∣E∣ 的取值范围为
0
{\rm 0}
0 到
n
(
n
−
1
)
/
2
{\rm n(n -1)/2}
n(n−1)/2 ,有
n
(
n
−
1
)
/
2
{\rm n(n -1)/2}
n(n−1)/2 条边的无向图称为完全图,在完全图中任意两个顶点之间都存在边。对于有向图,
∣
E
∣
{\rm \left | E \right | }
∣E∣ 的取值范围为
0
{\rm 0}
0 到
n
(
n
−
1
)
{\rm n(n-1)}
n(n−1) ,有
n
(
n
−
1
)
{\rm n(n-1)}
n(n−1) 条弧的有向图称为有向完全图,在有向完全图中任意两个顶点之间都存在方向相反的两条弧。
上图中
G
2
{\rm G_2}
G2 为无向完全图,而
G
3
{\rm G_3}
G3 为有向完全图。
5.子图
设有两个图 G = ( V , E ) {\rm G = (V,E)} G=(V,E) 和 G ′ = ( V ′ , E ′ ) {\rm G' = (V',E')} G′=(V′,E′) ,若 V ′ {\rm V'} V′ 是 V {\rm V} V 的子集,且 E ′ {\rm E'} E′ 是 E {\rm E} E 的子集,则称 G ′ {\rm G'} G′ 是 G {\rm G} G 的子图。若有满足 V ( G ′ ) = V ( G ) {\rm V(G')=V(G)} V(G′)=V(G) 的子图 G ′ {\rm G'} G′ ,则称其为 G {\rm G} G 的生成子图。上图中 G 3 {\rm G_3} G3 为 G 1 {\rm G_1} G1 的子图。
注意:并非 V {\rm V} V 和 E {\rm E} E 的任何子集都能构成 G {\rm G} G 的子图,因为这样的子集可能不是图,即 E {\rm E} E 的子集中的某些边关联的顶点可能不在这个 V {\rm V} V 的子集中。
6.连通、连通图和连通分量
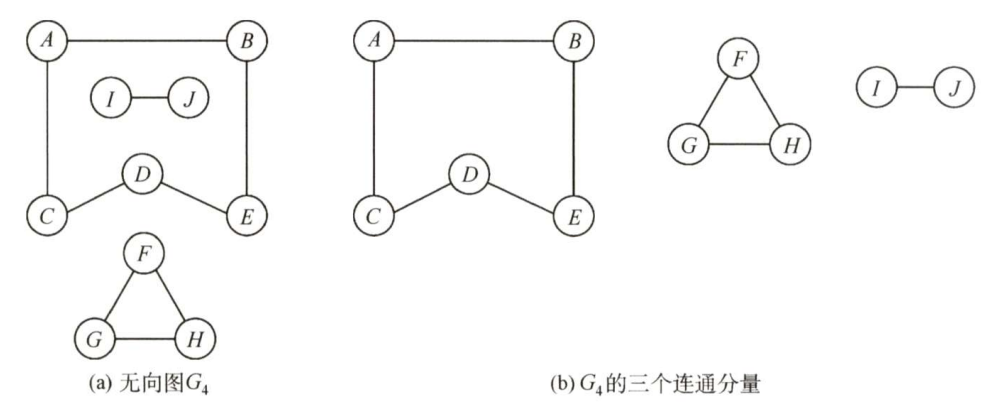
在无向图中,若从顶点 v {\rm v} v 到顶点 w {\rm w} w 有路径存在,则称 v {\rm v} v 和 w {\rm w} w 是连通的。若图 G {\rm G} G 中任意两个顶点都是连通的,则称图 G {\rm G} G 为连通图,否则称为非连通图。无向图中的极大连通子图称为连通分量,在上图(a)中,图 G 4 {\rm G_4} G4 有3个连通分量如上图(b)所示。假设一个图有 n {\rm n} n 个顶点,如果边数小于 n − 1 {\rm n-1} n−1 ,那么此图必是非连通图;
思考,如果图是非连通图,那么最多可以有多少条边?
非连通情况下边最多的情况:由
n
−
1
{\rm n-1}
n−1 个顶点构成一个完全图,此时再任意加入一条边则变成连通图。
7.强连通图、强连通分量
在有向图中,如果有一对顶点 v {\rm v} v 和 w {\rm w} w ,从 v {\rm v} v 到 w {\rm w} w 和从 w {\rm w} w 到 v {\rm v} v 之间都有路径,则称这两个顶点是强连通的。若图中任何一对顶点都是强连通的,则称此图为强连通图。有向图中的极大强连通子图称为有向图的强连通分量,图 G 1 {\rm G_1} G1 的强连通分量下图所示。
思考,假设一个有向图有
n
{\rm n}
n 个顶点,如果是强连通图,那么最少需要有多少条边?
有向图强连通情况下边最少的情况:至少需要
n
{\rm n}
n 条边,构成一个环路。
注意:在无向图中讨论连通性,在有向图中讨论强连通性。

8.生成树、生成森林
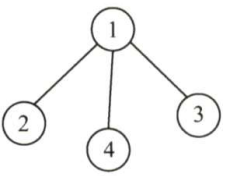
连通图的生成树是包含图中全部顶点的一个极小连通子图。若图中顶点数为 n {\rm n} n ,则它的生成树含有 n − 1 {\rm n-1} n−1 条边。包含图中全部顶点的极小连通子图,只有生成树满足这个极小条件,对生成树而言,若砍去它的一条边,则会变成非连通图,若加上一条边则会形成一个回路。在非连通图中, 连通分量的生成树构成了非连通图的生成森林。图 G 2 {\rm G_2} G2 的一个生成树如下图所示。
注意:区分极大连通子图和极小连通子图。极大连通子图是无向图的连通分量,极大即要求该连通子图包含其所有的边;极小连通子图是既要保持图连通又要使得边数最少的子图。
9.顶点的度、入度和出度
在无向图中,顶点 v {\rm v} v 的度是指依附于顶点 v {\rm v} v 的边的条数,记为 T D ( v ) {\rm TD(v)} TD(v) 。在上图(b)中,每个顶点的度均为3。对于具有 n {\rm n} n 个顶点、 e {\rm e} e 条边的无向图, ∑ i = 1 n T D ( v i ) = 2 e {\rm \sum_{i=1}^{n} TD(v_i)=2e} ∑i=1nTD(vi)=2e ,即无向图的全部顶点的度的和等于边数的2倍,因为每条边和两个顶点相关联。
在有向图中,顶点
v
{\rm v}
v 的度分为入度和出度,
入度是以顶点
v
{\rm v}
v 为终点的有向边的数目,记为
I
D
(
v
)
{\rm ID(v)}
ID(v) ;
而出度是以顶点
v
{\rm v}
v 为起点的有向边的数目,记为
O
D
(
v
)
{\rm OD(v)}
OD(v) 。
在上图(a)中,顶点2的出度为2、入度为1。顶点
v
{\rm v}
v 的度等于其入度与出度之和,即
T
D
(
v
)
=
I
D
(
v
)
+
O
D
(
v
)
{\rm TD(v)=ID(v)+OD(v)}
TD(v)=ID(v)+OD(v) 。对于具有
n
{\rm n}
n 个顶点、
e
{\rm e}
e 条边的有向图,
∑
i
=
1
n
I
D
(
v
i
)
=
∑
i
=
1
n
O
D
(
v
i
)
=
e
{\rm \sum_{i=1}^{n}ID(v_i) = \sum_{i=1}^{n}OD(v_i) =e }
∑i=1nID(vi)=∑i=1nOD(vi)=e ,即有向图的全部顶点的入度之和与出度之和相等,并且等于边数,这是因为每条有向边都有一个起点和终点。
10.边的权和网
在一个图中,每条边都可以标上具有某种含义的数值,该数值称为该边的权值。这种边上带有权值的图称为带权图,也称网。
11.稠密图、稀疏图
边数很少的图称为稀疏图,反之称为稠密图。稀疏和稠密本身是模糊的概念,稀疏图和稠密图常常是相对而言的。一般当图 G {\rm G} G 满足 ∣ E ∣ < ∣ V ∣ l o g ∣ V ∣ {\rm \left | E \right | < \left | V \right | log \left | V \right | } ∣E∣<∣V∣log∣V∣ ,可以将 G {\rm G} G 视为稀疏图。
12.路径、路径长度和回路
顶点 v p {\rm v_p} vp 到顶点 v q {\rm v_q} vq 之间的一条路径是指顶点序列 v p , v i 1 , v i 2 , … v i m v q {\rm v_p,v_{i_1},v_{i_2}, \dots v_{i_m} v_q} vp,vi1,vi2,…vimvq ,当然关联的边也可理解为路径的构成要素。路径上边的数目称为路径长度。第一个顶点和最后一个顶点相同的路径称为回路或环。若一个图有 n {\rm n} n 个顶点,并且有大于 n − 1 {\rm n-1} n−1 条边,则此图一定有环。
13.简单路径、简单回路
在路径序列中,顶点不重复出现的路径称为简单路径。
除第一个顶点和最后一个顶点外,其余顶点不重复出现的回路称为简单回路。
14.距离
从顶点
u
{\rm u}
u 出发到顶点
v
{\rm v}
v 的最短路径若存在,则此路径的长度称为从
u
{\rm u}
u 到
v
{\rm v}
v 的距离。
若从
u
{\rm u}
u 到
v
{\rm v}
v 根本不存在路径,则记该距离为无穷(
∞
\infty
∞)。
15.有向树
一个顶点的入度为0、其余顶点的入度均为1的有向图,称为有向树。
图的存储及基本操作
图的存储必须要完整、准确地反映顶点集和边集的信息。根据不同图的结构和算法,采用不同的存储方式将对程序的效率产生相当大的影响,因此所选的存储结构应适合于待求解的问题。
邻接矩阵法
所谓邻接矩阵存储,是指用一个一维数组存储图中顶点的信息,用一个二维数组存储图中边的信息(即各顶点之间的邻接关系),存储顶点之间邻接关系的二维数组称为邻接矩阵
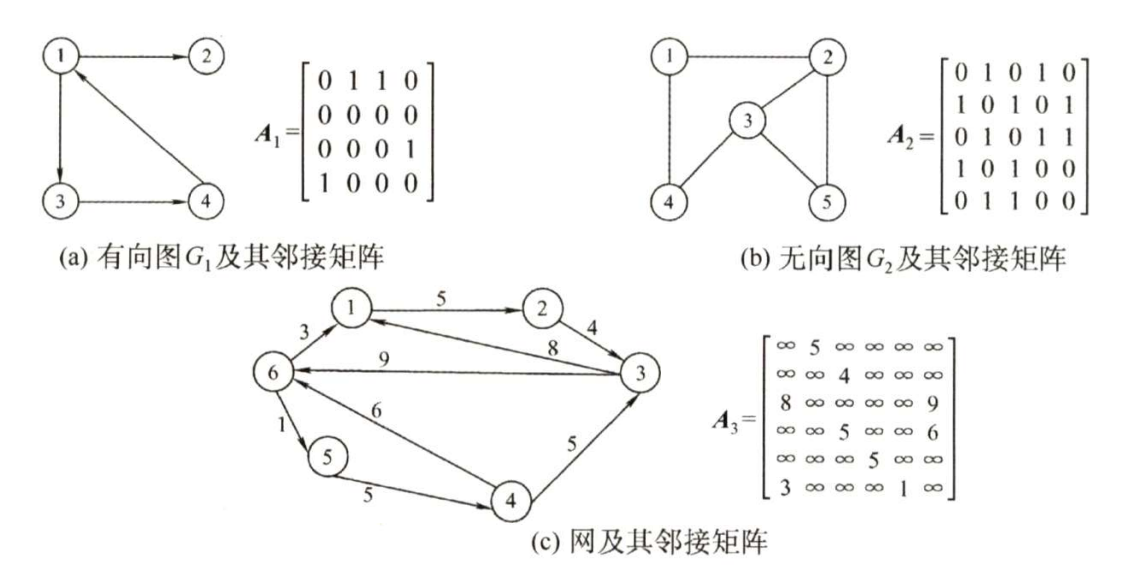
结点数为 n {\rm n} n 的图 G = ( V , E ) {\rm G=(V,E)} G=(V,E) 的邻接矩阵 A {\rm A} A 是 n × n {\rm n \times n} n×n 的。将 G {\rm G} G 的顶点编号为 v 1 , v 2 , … , v n {\rm v_1,v_2, \dots , v_n} v1,v2,…,vn 。若 ( v i , v j ) ∈ E {\rm (v_i,v_j) \in E} (vi,vj)∈E ,则 A [ i ] [ j ] = 1 {\rm A[i][j]=1} A[i][j]=1 否则 A [ i ] [ j ] = 0 {\rm A[i][j]=0} A[i][j]=0 。
A
[
i
]
[
j
]
=
{
1
,
若
(
v
i
,
v
j
)
或者
<
v
i
,
v
j
>
是
E
(
G
)
中的边
0
,
若
(
v
i
,
v
j
)
或者
<
v
i
,
v
j
>
不是
E
(
G
)
中的边
{\rm A[i][j] = \begin{cases} 1, & 若(v_i,v_j) 或者 <v_i,v_j> 是E(G)中的边 \\ 0, & 若(v_i,v_j) 或者 <v_i,v_j> 不是E(G)中的边 \\ \end{cases} }
A[i][j]={1,0,若(vi,vj)或者<vi,vj>是E(G)中的边若(vi,vj)或者<vi,vj>不是E(G)中的边
对于带权图而言,若顶点
v
i
{\rm v_i}
vi 和
v
j
{\rm v_j}
vj 之间有边相连,则邻接矩阵中对应项存放着该边对应的权值,若顶点
v
i
{\rm v_i}
vi 和
v
j
{\rm v_j}
vj 不相连,则用 $\infty $ 来代表这两个顶点之间不存在边:
A
[
i
]
[
j
]
=
{
w
i
j
,
若
(
v
i
,
v
j
)
或者
<
v
i
,
v
j
>
是
E
(
G
)
中的边
0
或
∞
,
若
(
v
i
,
v
j
)
或者
<
v
i
,
v
j
>
不是
E
(
G
)
中的边
{\rm A[i][j] = \begin{cases} w_{ij}, & 若(v_i,v_j) 或者 <v_i,v_j> 是E(G)中的边 \\ 0或\infty, & 若(v_i,v_j) 或者 <v_i,v_j> 不是E(G)中的边 \\ \end{cases} }
A[i][j]={wij,0或∞,若(vi,vj)或者<vi,vj>是E(G)中的边若(vi,vj)或者<vi,vj>不是E(G)中的边
有向图、无向图和网对应的邻接矩阵示例如下图所示。
图的邻接矩阵存储结构定义如下:
#define MaxVertexNum 100 //顶点数目的最大值
// VertexType,顶点的数据类型
// EdgeType,带权图中边上权值的数据类型
template<typename VertexType, typename EdgeType>
class MGraph {
private:
VertexType Vex[MaxVertexNum]; //顶点表
EdgeType Edge[MaxVertexNum][MaxVertexNum]; //邻接矩阵,边表
int vexnum, arcnum; //图的当前顶点数和弧数
};
注意:
1)在简单应用中,可直接用二维数组作为图的邻接矩阵(顶点信息等均可省略)。
2)当邻接矩阵的元素仅表示相应边是否存在时,
E
d
g
e
T
y
p
e
{\rm EdgeType}
EdgeType 可采用值为0和1的枚举类型。
3)无向图的邻接矩阵是对称矩阵,对规模特大的邻接矩阵可采用压缩存储。
4)邻接矩阵表示法的空间复杂度为
O
(
n
2
)
{\rm O(n^2)}
O(n2) ,其中
n
{\rm n}
n 为图的顶点数
∣
V
∣
{\rm \left | V \right | }
∣V∣ 。
图的邻接矩阵存储表示法具有以下特点∶
1)向图的邻接矩阵一定是一个对称矩阵 (并且唯一)。因此,在实际存储邻接矩阵时只需存储上(或下)三角矩阵的元素。
2)对于无向图,邻接矩阵的第
i
{\rm i}
i 行(或第
i
{\rm i}
i 列)非零元素(或非
∞
{\rm \infty }
∞ 元素)的个数正好是顶点
i
{\rm i}
i 的度
T
D
(
v
i
)
{\rm TD(v_i)}
TD(vi) 。
3)对于有向图,邻接矩阵的第
i
{\rm i}
i 行非零元素(或非
∞
{\rm \infty }
∞ 元素)的个数正好是顶点
i
{\rm i}
i 的出度
O
D
(
v
i
)
{\rm OD(v_i)}
OD(vi) ; 第
i
{\rm i}
i 列非零元素(或非
∞
{\rm \infty }
∞ 元素)的个数正好是顶点
i
{\rm i}
i 的入度
I
D
(
v
i
)
{\rm ID(v_i)}
ID(vi)
4)用邻接矩阵存储图,很容易确定图中任意两个顶点之间是否有边相连。但是,要确定图中有多少条边,则必须按行、按列对每个元素进行检测,所花费的时间代价很大。
5)稠密图适合使用邻接矩阵的存储表示。
6)设图
G
{\rm G}
G 的邻接矩阵为
A
{\rm A}
A ,
A
n
{\rm A^n}
An 的元素
A
n
[
i
]
[
j
]
{\rm A^n[i][j]}
An[i][j] 于由顶点
i
{\rm i}
i 到顶点
j
{\rm j}
j 的长度为
n
{\rm n}
n 的路径的数目。该结论了解即可,证明方法请参考离散数学教材。
邻接表法
当一个图为稀疏图时,使用邻接矩阵法显然要浪费大量的存储空间,而图的邻接表法结合了顺序存储和链式存储方法,大大减少了这种不必要的浪费。
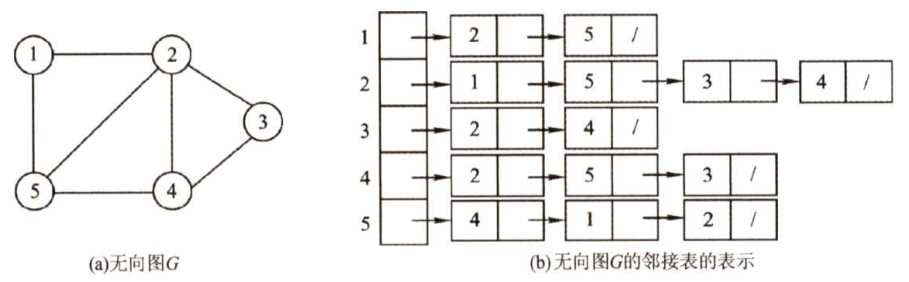
所谓邻接表,是指对图 G {\rm G} G 中的每个顶点 v i {\rm v_i} vi 建立一个单链表,第 i {\rm i} i 个单链表中的结点表示依附于顶点 v i {\rm v_i} vi 的边(对于有向图则是以顶点 v i {\rm v_i} vi 为尾的弧),这个单链表就称为顶点 v i {\rm v_i} vi 的边表(对于有向图则称为出边表)。边表的头指针和顶点的数据信息采用顺序存储(称为顶点表),所以在邻接表中存在两种结点:顶点表结点和边表结点,如下图所示。

顶点表结点由顶点域(data)和指向第一条邻接边的指针(firstarc)构成,
边表(邻接表)结点由邻接点域(adjvex)和指向下一条邻接边的指针域(nextarc)构成。
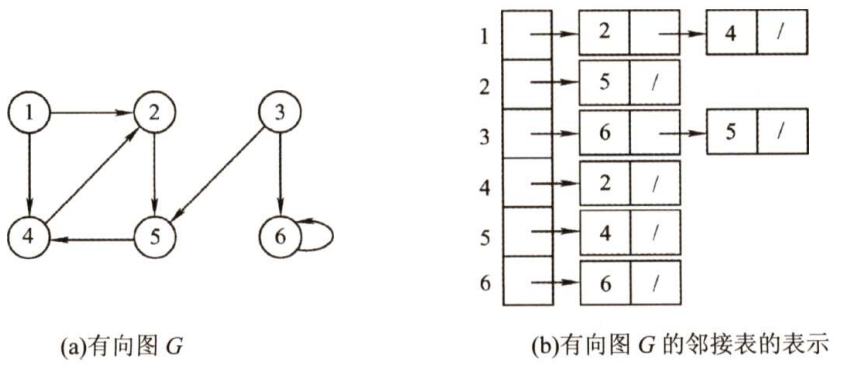
无向图和有向图的邻接表的实例分别如下图所示。
图的邻接表存储结构定义如下:
#define MaxVertexNum 100 //图中顶点数目的最大值
struct ArcNode { //边表结点
int adjvex; //该弧所指向的顶点的位置
ArcNode *next; //指向下一条弧的指针
//InfoType info;//网的边权值
};
template<typename VertexType>
struct VNode { //顶点表结点
VertexType data; //顶点信息
ArcNode *first; //指向第一条依附该顶点的弧的指针
};
template<typename VertexType>
class ALGraph { //ALGraph是以邻接表存储的图类型
private:
VNode<VertexType> vertices[MaxVertexNum]; //邻接表
int vexnum, arcnum; //图的顶点数和弧数
};
图的邻接表存储方法具有以下特点:
1)若
G
{\rm G}
G 为无向图,则所需的存储空间为
O
(
∣
V
∣
+
2
∣
E
∣
)
{\rm O(\left | V \right | + 2 \left | E \right | ) }
O(∣V∣+2∣E∣) ;若
G
{\rm G}
G 为有向图,则所需的存储空间为
O
(
∣
V
∣
+
∣
E
∣
)
{\rm O(\left | V \right | + \left | E \right | ) }
O(∣V∣+∣E∣) 。前者的倍数2是由于无向图中,每条边在邻接表中出现了两次。
2)对于稀疏图,采用邻接表表示将极大地节省存储空间。
3)在邻接表中,给定一顶点,能很容易地找出它的所有邻边,因为只需要读取它的邻接表。
在邻接矩阵中,相同的操作则需要扫描一行,花费的时间为
O
(
n
)
{\rm O(n)}
O(n) 。
但是,若要确定给定的两个顶点间是否存在边,则在邻接矩阵中可以立刻查到,
而在邻接表中则需要在相应结点对应的边表中查找另一结点,效率较低。
4)在有向图的邻接表表示中,求一个给定顶点的出度只需计算其邻接表中的结点个数;但求其顶点的入度则需要遍历全部的邻接表。因此,也有人采用逆邻接表的存储方式来加速求解给定顶点的入度。当然,这实际上与邻接表存储方式是类似的。
5)图的邻接表表示并不唯一,因为在每个顶点对应的单链表中,各边结点的链接次序可以是任意的,它取决于建立邻接表的算法及边的输入次序。
十字链表
十字链表是有向图的一种链式存储结构。在十字链表中,对应于有向图中的每条弧有一个结点,对应于每个顶点也有一个结点。这些结点的结构如下图所示。

弧结点中有5个域:
尾域(tailvex)和头域(headvex)分别指示弧尾和弧头这两个顶点在图中的位置;
链域hlink指向弧头相同的下一条弧;
链域tlink指向弧尾相同的下一条弧;
info域指向该弧的相关信息。
这样,弧头相同的弧就在同一个链表上,弧尾相同的弧也在同一个链表上。
顶点结点中有3个域:
data域存放顶点相关的数据信息,如顶点名称;
firstin和 firstout两个域分别指向以该顶点为弧头或弧尾的第一个弧结点。
下图为有向图的十字链表表示法。注意,顶点结点之间是顺序存储的。
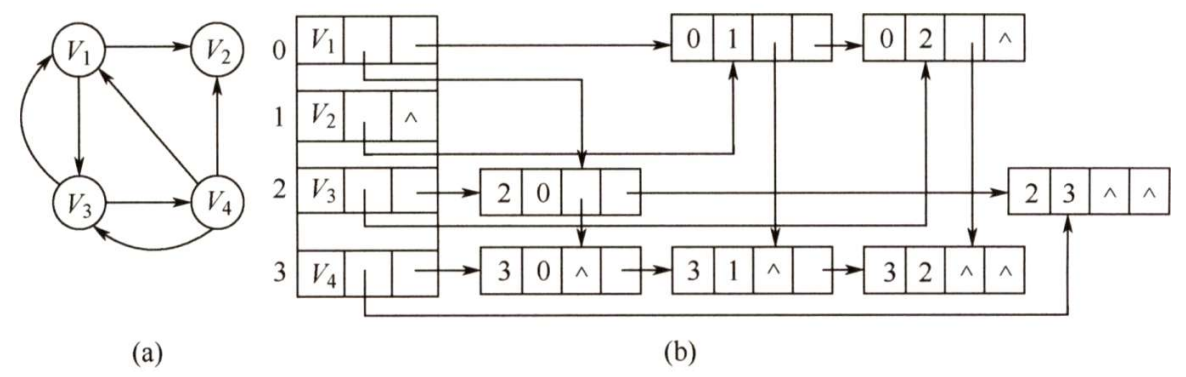
在十字链表中,既容易找到 V i {\rm V_i} Vi 为尾的弧,又容易找到 V i {\rm V_i} Vi 为头的弧,因而容易求得顶点的出度和入度。图的十字链表表示是不唯一的,但一个十字链表表示确定一个图。
邻接多重表
邻接多重表是无向图的另一种链式存储结构。
在邻接表中,容易求得顶点和边的各种信息,但在邻接表中求两个顶点之间是否存在边而对边执行删除等操作时,需要分别在两个顶点的边表中遍历,效率较低。
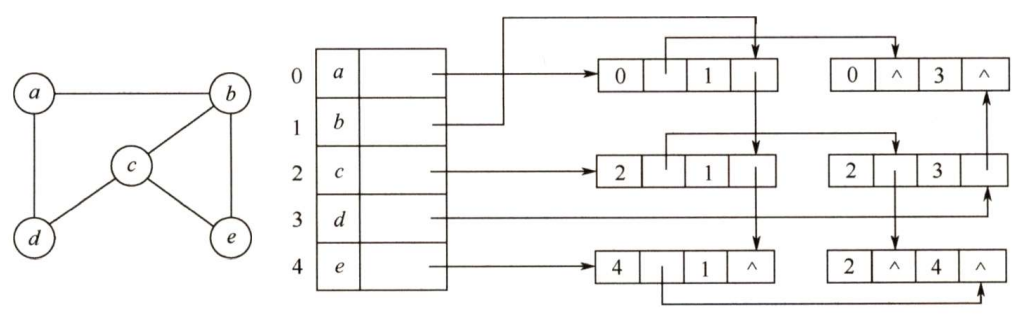
与十字链表类似,在邻接多重表中,每条边用一个结点表示,其结构如下所示。

其中,
mark为标志域,可用以标记该条边是否被搜索过;
ivex和jvex为该边依附的两个顶点在图中的位置;
ilink指向下一条依附于顶点ivex的边;
jlink指向下一条依附于顶点jvex 的边,
info为指向和边相关的各种信息的指针域。
每个顶点也用一个结点表示,它由如下所示的两个域组成。

其中,data域存储该顶点的相关信息,firstedge域指示第一条依附于该顶点的边
在邻接多重表中,所有依附于同一顶点的边串联在同一链表中,由于每条边依附于两个顶点, 因此每个边结点同时链接在两个链表中。对无向图而言,其邻接多重表和邻接表的差别仅在于, 同一条边在邻接表中用两个结点表示,而在邻接多重表中只有一个结点。
下图为无向图的邻接多重表表示法。邻接多重表的各种基本操作的实现和邻接表类似。
图的基本操作
图的基本操作是独立于图的存储结构的。而对于不同的存储方式,操作算法的具体实现会有着不同的性能。在设计具体算法的实现时,应考虑采用何种存储方式的算法效率会更高。
图的基本操作主要包括(仅抽象地考虑,故忽略掉各变量的类型):
Adjacent(G, x, y):判断图 G {\rm G} G 是否存在边 < x , y > {\rm <x,y>} <x,y> 或 ( x , y ) {\rm (x,y)} (x,y) 。Neighbors(G, x):列出图 G {\rm G} G 中与结点 x {\rm x} x 邻接的边。Insertvertex(G, x):在图 G {\rm G} G 中插入顶点 x {\rm x} x 。DeleteVertex(G, x):从图 G {\rm G} G 中删除顶点 x {\rm x} x 。AddEdge(G, x, y):若无向边 ( x , y ) {\rm (x,y)} (x,y) 或有向边 < x , y > {\rm <x,y>} <x,y> 不存在,则向图 G {\rm G} G 中添加该边。RemoveEdge(G, x, y):若无向边 ( x , y ) {\rm (x,y)} (x,y) 或有向边 < x , y > {\rm <x,y>} <x,y> 存在,则从图 G {\rm G} G 中删除该边。FirstNeighbor(G, x):求图 G {\rm G} G 中顶点 x {\rm x} x 的第一个邻接点,若有则返回顶点号。若 x {\rm x} x 没有邻接点或图中不存在 x {\rm x} x ,则返回-1。NextNeighbor(G, x, y):假设图 G {\rm G} G 中顶点 y {\rm y} y 是顶点 x {\rm x} x 的一个邻接点,返回除 y {\rm y} y 外顶点 x {\rm x} x 的下一个邻接点的顶点号,若 y {\rm y} y 是 x {\rm x} x 的最后一个邻接点,则返回-1。Get_edge_value(G, x, y):获取图 G {\rm G} G 中边 ( x , y ) {\rm (x,y)} (x,y) 或 < x , y > {\rm <x,y>} <x,y> 对应的权值。Set_edge_value(G, x, y, v):设置图 G {\rm G} G 中边 ( x , y ) {\rm (x,y)} (x,y) 或 < x , y > {\rm <x,y>} <x,y> 对应的权值为 v {\rm v} v 。
此外,还有图的遍历算法:按照某种方式访问图中的每个顶点且仅访问一次。图的遍历算法包括深度优先遍历和广度优先遍历。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









