







这是本人的学习历程,属于学习总结。分享给大家,仅作参考。
(如果哪里有问题请留言指出。谢谢~)
概述
现在开始接触 freeRtos 操作系统的API使用。先从任务的建立和删除开始!
- 注意:本文的esp-idf 的版本为V4.3。
一、API介绍
- 详细API介绍请看:
- ESP32编程指南 —— Task API (任务)
- xTaskCreatePinnedToCore (创建任务)
BaseType_t xTaskCreatePinnedToCore(TaskFunction_t pvTaskCode, //任务函数名
const char *const pcName, //字符串名称
const uint32_t usStackDepth, //任务堆栈大小
void *const pvParameters, //传递给任务的指针
UBaseType_t uxPriority, //任务优先级 0~31
TaskHandle_t *constpvCreatedTask, //句柄
const BaseType_t xCoreID) //运行在哪个内核上
- vTaskDelete (删除任务)
void vTaskDelete(TaskHandle_t xTaskToDelete) //通过句柄,删除对应的任务
- vTaskDelay (延时)
void vTaskDelay(const TickType_t xTicksToDelay) //任务阻塞的时间
- 例子:
- 延时100ms,里面的参数填:
100 / portTICK_PERIOD_MS
- 延时1000ms,里面的参数填:
1000 / portTICK_PERIOD_MS
- 调用该函数,任务会进入阻塞状态,这时其他优先级相等或更低的任务可以运行。
二、项目介绍
- 建立一个项目,创建 任务1
- 任务1:创建 任务2 和 任务3 ,然后删除自身任务
- 任务2:每隔0.3秒,串口输出 “Task2 Running…”
- 任务3:每隔1秒,串口输出 “Task3 Running…”;输出5次后,删除 任务2
三、详细代码
//Linux 终端操作:
cd ~/esp/myPrj/ //进入我的工程目录
cp -r my_tamplate 1.first_demo //复制例程,新名字为1.first_demo
rm -rf 1.first_demo/build/ //删除build文件,因为需要重新编译。
code 1.first_demo //VScode 打开1.first_demo
- 1、main.c 文件
#include <stdio.h> //添加头文件 用于调用串口输出函数printf
#include "sdkconfig.h"
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_system.h"
#include "comp1.h"
//创建句柄
TaskHandle_t xHandle_task1 = NULL;
TaskHandle_t xHandle_task2 = NULL;
TaskHandle_t xHandle_task3 = NULL;
//任务3
void vTask3(void * pvParameters)
{
uint8_t i = 0;
//死循环
for (;;)
{
if (i > 4)
{
//判断句柄是否存在
if (xHandle_task2 != NULL)
{
//通过句柄,删除任务2
vTaskDelete(xHandle_task2);
//将句柄清除
xHandle_task2 = NULL;
}
}
else
{
i++;
}
//串口输出
printf("Task3 Running...\n");
//延时1000ms
vTaskDelay(1000 / portTICK_PERIOD_MS);
}
}
//任务2
void vTask2(void * pvParameters)
{
//死循环
for (;;)
{
//串口输出
printf("Task2 Running...\n");
//延时300ms
vTaskDelay(300 / portTICK_PERIOD_MS);
}
}
//任务1
void vTask1(void * pvParameters)
{
//创建任务2
xTaskCreatePinnedToCore(vTask2, //任务函数
"task2", //任务名称
2048, //堆栈大小
NULL, //传递参数
1, //任务优先级
&xHandle_task2, //任务句柄
tskNO_AFFINITY); //无关联,不绑定在任何一个核上
//创建任务3
xTaskCreatePinnedToCore(vTask3, //任务函数
"task3", //任务名称
2048, //堆栈大小
NULL, //传递参数
1, //任务优先级
&xHandle_task3, //任务句柄
tskNO_AFFINITY); //无关联,不绑定在任何一个核上
//删除自身任务
vTaskDelete(NULL);
}
/*创建任务1函数*/
void vCreate_task1(void)
{
//创建任务1
xTaskCreatePinnedToCore(vTask1, //任务函数
"task1", //任务名称
2048, //堆栈大小
NULL, //传递参数
2, //任务优先级
&xHandle_task1, //任务句柄
tskNO_AFFINITY); //无关联,不绑定在任何一个核上
}
/*主函数*/
void app_main(void)
{
//调用函数创建任务1
vCreate_task1();
}
四、串口输出
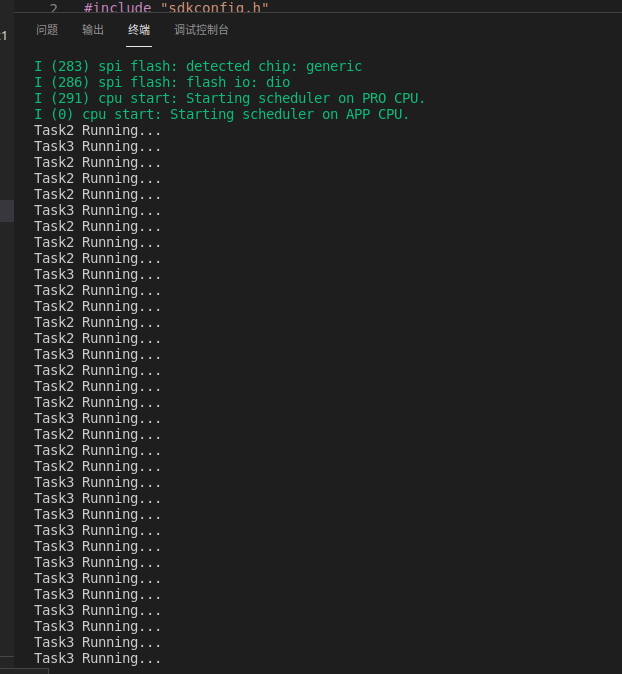
- 删除任务2后,只有任务3在输出。















 1617
1617











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









