







一、依赖安装
pip install opencv-python
pip install pyautogui二、获取系统缩放比例
注意:必须先通过ctypes获取wid之后才能导入pyautogui,如果需要在其它代码中引用该模块,最好把获取分辨率这部分代码放到程序入口处,然后传递给识图函数,避免提前导入pyautogui导致获取分辨率失败。
# 获取当前系统缩放比例
import ctypes
# wid必须在导入pyautogui之前赋值
wid = ctypes.windll.user32.GetSystemMetrics(0)
import pyautogui
screen_width , _ = pyautogui.size()
true_scale=screen_width/wid三、定义匹配结果类
x,y表示中心坐标,x1,y1,x2,y2表示四个顶点的坐标,match表示匹配度,取值范围0-100。
from dataclasses import dataclass
# 定义匹配结果类
@dataclass
class MatchInfo:
match: float = 0
x: int = 0
y: int = 0
x1: int = 0
y1: int = 0
x2: int = 0
y2: int = 0
@staticmethod
def not_found():
return MatchInfo()
def __str__(self):
return (
f"匹配度={self.match:.2f}, "
f"中心坐标: ({self.x}, {self.y}) "
)四、完整代码
参数:
template:模板图片,字符串,即待匹配图片,支持两种形式,可以传入图片地址,也可以直接传入图片名称,此时会从代码中设定的图片文件夹寻找图片;
min_threshold:最小匹配度,浮点数,只返回匹配度大于等于该值的结果,取值范围0-100
gray:灰度匹配,布尔值,为真时则忽略颜色,可以大幅提升匹配速度,适用于不考虑颜色的情况
a,b,c,d:区域匹配坐标,整数,都为0时不生效,否则只在该区域匹配,但是返回的结果坐标任然是相对于整个屏幕
image_sacle:图片缩放,浮点数,即传入的图片的缩放,也就是截图时电脑对应的缩放,默认和1.25,即125%,需要自己根据情况修改,取值是(1,1.25,1.5,1.75,2)
max_deviation:最大偏差值,整数,多个匹配结果之间距离的最小值,如果存在同一个目标被识别成两个结果的情况,可以适当增加这个参数的值
返回值:
列表类型,包含所有符合条件的匹配结果(MatchInfo对象),如果没有匹配到则是空列表
# 获取当前系统缩放比例
import ctypes
# wid必须在导入pyautogui之前赋值
wid = ctypes.windll.user32.GetSystemMetrics(0)
import pyautogui
screen_width , _ = pyautogui.size()
true_scale=screen_width/wid
from dataclasses import dataclass
# 定义匹配结果类
@dataclass
class MatchInfo:
match: float = 0
x: int = 0
y: int = 0
x1: int = 0
y1: int = 0
x2: int = 0
y2: int = 0
@staticmethod
def not_found():
return MatchInfo()
def __str__(self):
return (
f"匹配度={self.match:.2f}, "
f"中心坐标: ({self.x}, {self.y}) "
)
import cv2
import os
import numpy as np
# 识图函数
def find_image_on_screen(template, min_threshold, gray=False, a=0, b=0, c=0, d=0,image_sacle=1.25,max_deviation = 13):
# 图片存放地址
image_path='D:\\test\\image'
# 处理传入的匹配度
min_threshold = min_threshold / 100
# 路径处理,如果传入的参数只是图片名称,就从默认路径寻找改图片
if not os.path.isabs(template):
template = os.path.join(image_path, template)
# 读取模板图片
templ = cv2.imread(template)
# 获取屏幕截图
screenshot = cv2.cvtColor(np.array(pyautogui.screenshot()), cv2.COLOR_RGB2BGR)
# 获取模板图片长宽
xx, yy = templ.shape[:-1]
# 如果实际缩放和图片缩放不一致,就进行调整
if true_scale != image_sacle:
screenshot = cv2.resize(screenshot, None, fx=image_sacle / true_scale, fy=image_sacle / true_scale)
# 判断是否需要灰度匹配
if gray:
screenshot = cv2.cvtColor(screenshot, cv2.COLOR_BGR2GRAY)
templ = cv2.cvtColor(templ, cv2.COLOR_BGR2GRAY)
# 判断是否需要区域匹配
if a==0 and b==0 and c==0 and d==0:
screenshot_region = screenshot # 默认情况下,使用整个截图
else:
# 这里需要特殊处理,避免裁剪后的截图比模板图片小导致报错
c = max(a + yy, c)
d = max(b + xx, d)
# 裁剪截图
screenshot_region = screenshot[b:d, a:c]
# 执行模板匹配
result = cv2.matchTemplate(screenshot_region, templ, cv2.TM_CCOEFF_NORMED)
# 获取满足匹配度的结果
locations = np.where(result >= min_threshold)
locations = list(zip(*locations[::-1]))
match_info = {}
# 对匹配结果进行筛选和去重,避免同一个目标被识别成多个结果,可以通过调整max_deviation的值来调整效果
for loc in locations:
x, y = loc
x = x + a # 调整x坐标以匹配整个截图
y = y + b # 调整y坐标以匹配整个截图
match_value = result[y - b, x - a]
skip_current = False
for (prev_x, prev_y), prev_match_value in match_info.items():
if abs(x - prev_x) <= max_deviation and abs(y - prev_y) <= max_deviation:
if match_value > prev_match_value:
match_info[(x, y)] = match_value
del match_info[(prev_x, prev_y)]
else:
skip_current = True
break
if not skip_current:
match_info[(x, y)] = match_value
# 构建匹配结果列表
match_info_objects = []
for (x, y), match_value in sorted(
match_info.items(), key=lambda x: x[1], reverse=True
):
h, w = xx, yy
top_left = (x, y)
bottom_right = (x + w, y + h)
center = (x + w // 2, y + h // 2)
matche = MatchInfo(
match_value * 100,
center[0],
center[1],
top_left[0],
top_left[1],
bottom_right[0],
bottom_right[1],
)
match_info_objects.append(matche)
return match_info_objects
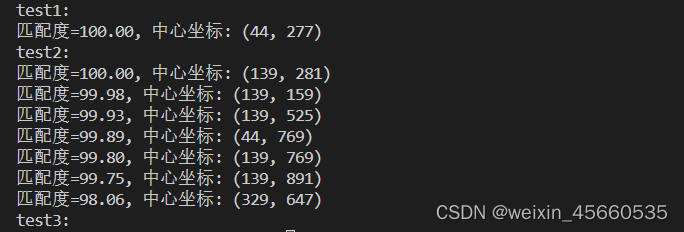
五、示例用法
if __name__=='__main__':
# 根据图片名称匹配,其他参数取默认值
print("test1:")
for s in (find_image_on_screen('test1.png')):
print(s)
print("test2:")
# 根据图片路径匹配,匹配度85
for s in (find_image_on_screen('D:\\test\\image\\test2.png',min_threshold=85)):
print(s)
print("test3:")
# 根据路径匹配,忽略颜色,在指定区域匹配
for s in (find_image_on_screen('D:\\test\\image\\test3.png',gray=True,a=11,b=35,c=983,d=639)):
print(s)运行结果:















 5170
5170











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









