







其实我也不是忘记密码,一个字母的密码它说错误就错误了,那只能重置了。
-
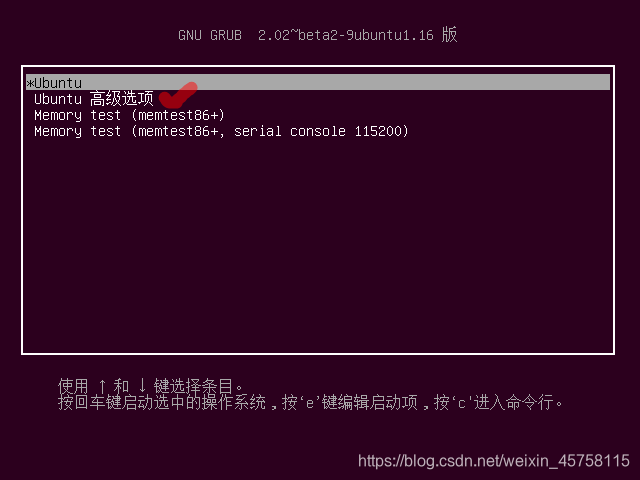
启动时进入GNU GRUB界面(长按shift / 按下ESC / 按下e键)
-
选择进入Ubuntu高级选项。
-
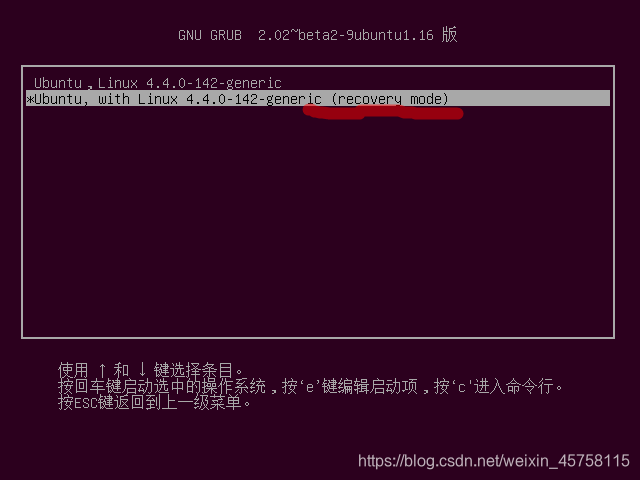
选择recovery mode, 按e
-
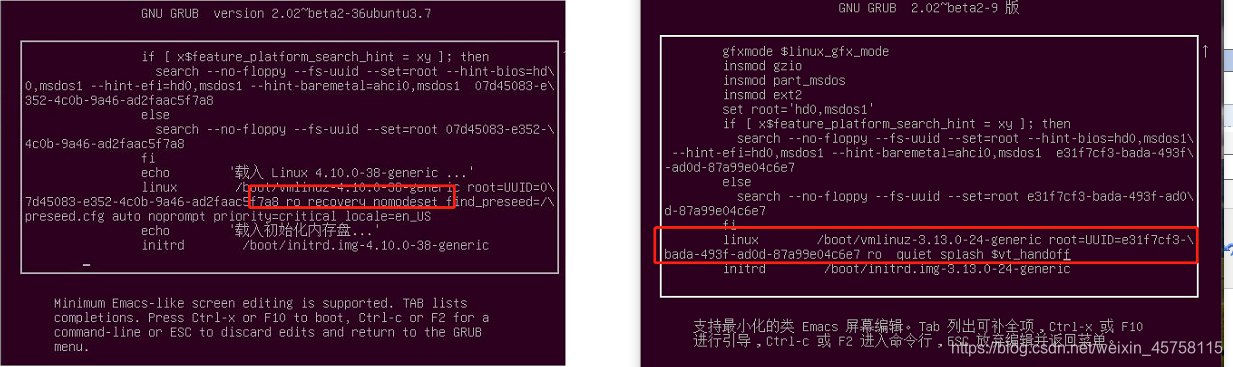
将光标定位到linux一行,出现recovery nomodeset就删除,没有就不用管。
-
在linux行末输入quiet splash rw init=/bin/bash,再按下Fn+F10(F10也行)
-
在新出现的页面中输入(注意区分大小写)
passwd+“你的用户名”例如我的用户名是live33 我输的就是:passwd live33 -
接下来输入新密码,再重新输一遍。
这里注意密码是看不见的,输好后回车就行。 -
工具栏选重启,再登录就行。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









