







CSDN博客初识&&红外通信(51)学习心得
CSDN博客初识
了解CSDN内容
笔者于2019年经历高考,在暑假末尾接触到csdn,一开始是因为搜索C语言的相关题目,然后进一步了解发现csdn是一个广阔的学习平台。正如它的广告语,成就一亿技术人,在这里你能接触到更多更前端的资讯,成为你大学学习的跳板。

看博客学习相关知识
因为技术上还是太萌新,关注的内容也不广,只是一些皮毛,现在正从一些大佬的博客中摸索学习,先模仿再内化成自己的东西。
入手写博客用来总结及初步规划
结合个人学习方法和嵌入式等学习内容的特色,笔者打算今后把一些理解以博客形式记录总结,方便自己回顾。这一期是第一次用markdown写博客,是用最近小比赛涉及的红外通信环节的一些学习练手,并打算在2020年1月11号之前再写一篇关于51EEPROM(IIC总线)的个人学习理解。鉴于笔者学校进入考试月,时间紧张,文章略显准备不充足,求大佬勿喷。
可能一些专有名词的拿捏不是很准确,请原谅。
下面是正文内容
51单片机的红外通信
基本内容
红外线遥控
由残存的高中物理知识,红外线遥控就是利用波长为0.76~1.5微米之间的近红外线来传送控制信号的。
红外线系统的组成
红外线系统一般由红外发射装置和红外接收设备两大部分组成。红外发射装置又可以由键盘电路、红外编码芯片、电源和红外发射电路组成。红外接收设备可以由红外接收线路、红外解码芯片、电源和应用电路组成。通常为了使信号更好的被发射端发送出去,经常会将二进制数据信号调制成为脉冲信号,通过红外发射管发射。常用的有通过脉冲宽度来实现信号调制的脉宽调制(PWM)和通过脉冲串之间的时间间隔来实现信号调制的脉冲调制(PPM)两种方法。
红外遥控器发射
通常红外遥控为了提高抗干扰性能和降低电源消耗,红外遥控器常用载波的方式传送二进制编码,常用的载波频率为38KHZ,这是由发射端所使用的455KHZ晶振(晶振知识不作详细介绍,有意点击链接)来决定的。通常的红外遥控器是将遥控信号(二进制脉冲码)调制在38KHZ的载波上,经缓冲放大后送至红外发光二极管,转化为红外信号发射出去的。
图为封装好的红外接收器:

关键环节
中断
- 本环节涉及计时要求,现引入中断部分知识。
红外脉冲使得红外接收头由高电平变低电平,所以产生一个下降沿,使得产生外部中断。
- 红外接收头对应I/0口的P3^2引脚

- 部分中断源暨中断号

根据引脚(P3^2)和中断引起原因(下降沿),在这里使用外部中断0,对应中断号为0。
void IrInit()
{ IT0=1;//下降沿触发
EX0=1;//打开中断 0 允许
EA=1; //打开总中断
IRIN=1;//初始化端口
}
PPM方式的红外通信
本次红外遥控器使用的是NEC协议
特征如下:
- 8位地址和8位指令长度(相当于豌豆射手一次吐八个豌豆);
- 地址和命令2次传输(确保可靠性);
- 载波频率38KHZ;
- 位时间为1.125ms或2.25ms;

- 记住开头起始码的9ms和4.5ms低高电平升落
- 数据反码相当于双重保险
- 地址码,地址反码、控制码、控制反码均是8位数据格式。按照低位在前,高位在后的顺序发送。
- 摁一次相当于八个脉冲串
NEC 码的位定义:一个脉冲对应 560us 的连续载波,
一个逻辑 0 的传输需要 1.125ms(560us脉冲+560us 低电平)
一个逻辑 1 传输需2.25ms(560us 脉冲+1680us 低电平)
时序图如下:(在低谷的时候是低电平,反之为高电平)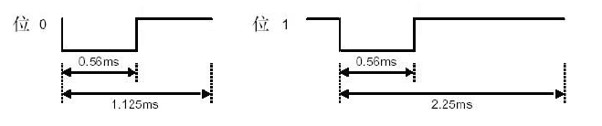
| 位0 | 位 1 | |
|---|---|---|
| 低电平时间 | 0.56ms | 0.56ms |
| 高电平时间 | 0.565ms | 1.69ms |
由于红外接收头在收到脉冲的时候为低电平,在没有脉冲的时候为高电平,所以可以通过外部中断的下降沿触发中断,在中断内可以通过判断高电平时间来识别是位0还是位1。
//延时函数
void delay(uint i)
{
delay(i--); //延时儿~
}
//读取红外数值的中断服务函数
void ReadIr() interrupt 0
{
u8 j,k;
u16 YD;
Time=0; //也可以定义静态变量static
delay(700); //7ms
if(IRIN==0) //确认是否真的接收到正确的信号,接收到后电平由1到0
{
YD=1000; //1000*10us=10ms,超过说明接收到错误的信号
/*当两个条件都为真是循环,如果有一个条件为假的时候跳出循环, 免得程序出错的时侯,程序死在这里*/
while((IRIN==0)&&(YD>0)) // 等 待 前 面 9ms 的 低 电 平 过 去
{
delay(1); //相当于特殊功能的延时
YD--;
}
if(IRIN==1) //如果正确等到 9ms 低电平。9ms:看红外时序图(NEC协议)
{
YD=500;
while((IRIN==1)&&(YD>0)) //等待 4.5ms 的起始高电平过去
{
delay(1);
YD--;
}
for(k=0;k<4;k++) //共有 4 组数据(时序图中用户码,数据码)
{
for(j=0;j<8;j++) //接收一组数据
{
YD=60;
while((IRIN==0)&&(YD>0))
//等待信号前面的 560us低电平过去
{
delay(1);
YD--;
}
YD=500;
while((IRIN==1)&&(YD>0))
//以下利用Time累加计算高电平的时间长度。
{
delay(10); //0.1ms
Time++;
YD--;
if(Time>30)
{
return; //大于,服务函数无效
}
}
IrValue[k]>>=1; //k 表示第几组数据
if(Time>=8) //如果高电平出现大于 565us,那么是 1
{
IrValue[k]|=0x80; //据说用或运算稳健,其实也可以直接令其=1
}
Time=0; //用完时间要重新赋值,笔者做c的题经常出错
}
}
}
if(IrValue[2]!=~IrValue[3]) //控制码跟控制反码是否匹配
{
return; //不匹配,服务函数无效
}
}
}
- 用到的时间数据有,9ms,4.5ms,0.56ms,1.69||0.5625ms
- 这里对时间的判断用到了模糊判断,毕竟机器的准确性和数值太小,难免有偏差,所以例如9ms我们采用一个10ms的延时去判断。
- 对应逻辑位1和0对应高电平的时间0.565和1.69差别较大,我们可以采用一个中间数如0.8/0.9/1.0去区别
- return的作用不太明显,这是因为服务函数没执行什么实体的工程,可以加一个动态数码管的按键读取或者是switch去遥控小车等来体现。
作品应用
实图


基本功能
红外循迹的传感器不够灵敏所以在这里改成了红外通信的遥控,也没啥花里胡哨的,就是用服务函数返回的参数来switch判断哪哪哪电机咋转
主要代码部分
void IrInit() //中断函数
{ IT0=1;//下降沿触发
EX0=1;//打开中断 0 允许
EA=1; //打开总中断
IRIN=1;//初始化端口
}
void delayms(u8 i)//延时函数
{ i*=1000i;
while(i--); //延时1ms
}
void ReadIr() interrupt 0//红外键值中断服务函数
{
u8 j,k,YD=0; //相关临时变量
EX1 = 0; //关闭外部中断,防止再有信号到达
delayms(15); //延时时间,进行红外消抖
if (IRIN==1) //判断红外信号是否消失,真则无效重来
{
EX1 =1; //外部中断1开
return; //返回
}
while (!IRIN) //等IR变为高电平,跳过9ms的前导低电平信号。
{
delayms(1); //延时等待,稍作改进,不再盲等,见机行事
}
for (j=0;j<4;j++) //采集红外遥控器4组数据
{
for (k=0;k<8;k++) //分次采集8位数据
{
while (IRIN) //等 IR 变为低电平,跳过4.5ms的前导高电平信号。
{
delayms(1); //延时等待
}
while (!IRIN) //等 IR 变为高电平
{
delayms(1); //延时等待
}
while (IRIN) //计算IR高电平时长
{
delayms(1); //延时等待
YD++; //计数器加加
if (YD>=30) //判断计数器累加值
{
EX1=1; //打开外部中断功能
return; //返回
}
}
IrValue[j]=IrValue[j] >> 1; //进行数据位移操作并自动补零
if (YD>=8) //判断数据长度
{
IrValue[j] |= 0x80; //数据最高位补1
}
YD=0; //清零位数计录器
}
}
if (IrValue[2]!=~IrValue[3]) //判断地址码是否相同
{
EX1=1; //打开外部中断
return; //返回
}
for(j=0;j<10;j++) //循环进行键码解析,比上面多的部分
{
if(IrValue[2]==controlduan[j]) //进行键位对应,红外遥控器用数组controlduan,相应的8位二进制数对应特殊功能
/*u8 code controlduan[]={0x19,0x46,0x15,0x44,0x43,0x40,0x0D,0x0E,0x00,0x0F}这是摁键二进制数的库*/
{
ControlCar(j); //控制相应电机顺便用数码管显示方便判断摁键功能
}
}
EX1 = 1; //外部中断开,准备下一次
}
void ControlCar(u8 ConType) //采集键值实现功能函数
{
tingzhi();
switch(ConType) //判断摁键对应模式
{
case 1: //前进 //形式1
{
tingzhi(); //进入前进之前 先停止一段时间 防止电机反向电压冲击主板 导致系统复位(从别处学来,不过可以不用)
Delay1ms(240);
qianjin();
break;
}
case 2: //后退 //形式2
{
tingzhi(); //进入后退之前 先停止一段时间 防止电机反向电压冲击主板 导致系统复位
Delay1ms(240);
houtui(); //M2电机反转
break;
}
case 3: //左转 //形式3
{
tingzhi(); //进入左转之前 先停止一段时间 防止电机反向电压冲击主板 导致系统复位
Delay1ms(240);
zuozhuan90(0); //M2电机正转
break;
}
case 4: //右转 //形式4
{
tingzhi(); //进入右转之前 先停止一段时间 防止电机反向电压冲击主板 导致系统复位
Delay1ms(240);
youzhuan90(0); //M1电机正转 //M2电机反转
break;
}
case 6: //形式6
{
tingzhi(); //进入右转之前 先停止一段时间 防止电机反向电压冲击主板 导致系统复位
Delay1ms(240);
youzhuan30(0); //M1电机正转 //M2电机反转
break;
}
case 5: //停止 //形式5
{
tingzhi();
break; //退出当前选择
}
}
}
- 相关引脚的注释和一些浅易函数名作用不再给出,关键是代码部分。
疑问&改善
- 对于误差模糊处理想法很好,但是不知道这个误差的积累会不会对连续判断产生影响。
- 功能太过简单,自己说萌新菜鸡其实是给自己不求上进找借口,求学长大佬放过。
- 回归上文,这次以练手为主,写的太过冗长,不精炼
- 听学长说可以加个PID实现闭环更加牛批的效果,小生还需努力,弥补差距。
- 借老爸一句话:奋斗吧,少年!















 713
713











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









