







M4核的中断实验(按键/光电开关/火焰传感器/人体红外),检测到中断时,需要打印(串口)触发信息
1>中断实验(按键/光电开关/火焰传感器/人体红外)
2>使用M4核,检测到中断触发时,灯的状态(GPIO控制器)取反
3>并且检测到中断时,需要打印(串口)触发信息
上升沿代码
void HAL_GPIO_EXTI_Rising_Callback(uint16_t GPIO_Pin)
{
switch(GPIO_Pin)
{
case GPIO_PIN_12:
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_10);
printf("U10-->LED2\n");
break;
case GPIO_PIN_15:
HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_10);
printf("U13-->LED1\n");
break;
case GPIO_PIN_5:
HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_8);
printf("U15-->LED3\n");
break;
}
}
下降沿代码
void HAL_GPIO_EXTI_Falling_Callback(uint16_t GPIO_Pin)
{
switch(GPIO_Pin)
{
//KEY2--->PF10
case GPIO_PIN_7:
HAL_GPIO_TogglePin(GPIOF,GPIO_PIN_10);
printf("KEY2-->LED2\n");
break;
//KEY3--->PE10
case GPIO_PIN_8:
HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_10);
printf("KEY3-->LED1\n");
break;
//KEY1--->PE8
case GPIO_PIN_9:
HAL_GPIO_TogglePin(GPIOE,GPIO_PIN_8);
printf("KEY1-->LED3\n");
break;
}
}
fputc函数打印信息
int fputc(int ch,FILE* stream)
{
//判断发送寄存器是否为空
while(!(huart4.Instance->ISR & (0x1 << 7)));
//将要发送的数据放入到发送寄存器中
huart4.Instance->TDR = ch;
//判断是否为'\n'
if(ch == '\n')
{
//判断发送寄存器是否为空
while(!(huart4.Instance->ISR & (0x1 << 7)));
huart4.Instance->TDR = '\r';
}
return ch;
}
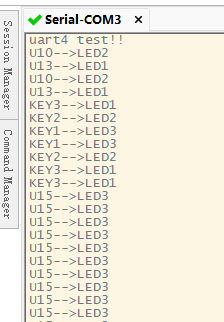
测试结果
















 406
406











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











