







SPI实验
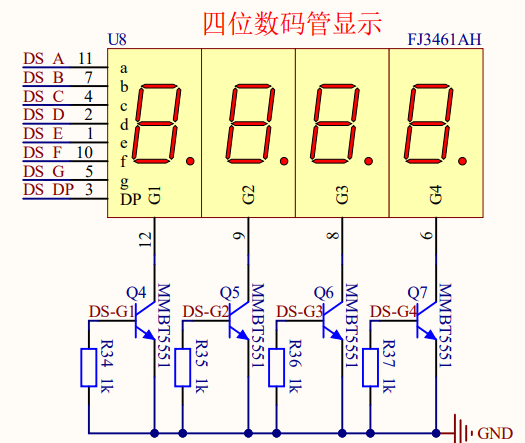
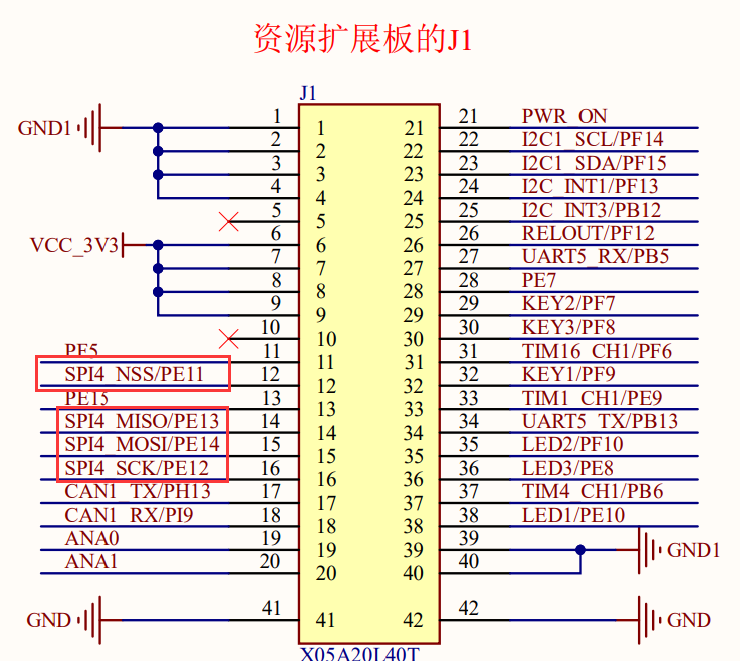
原理图分析
分析芯片手册
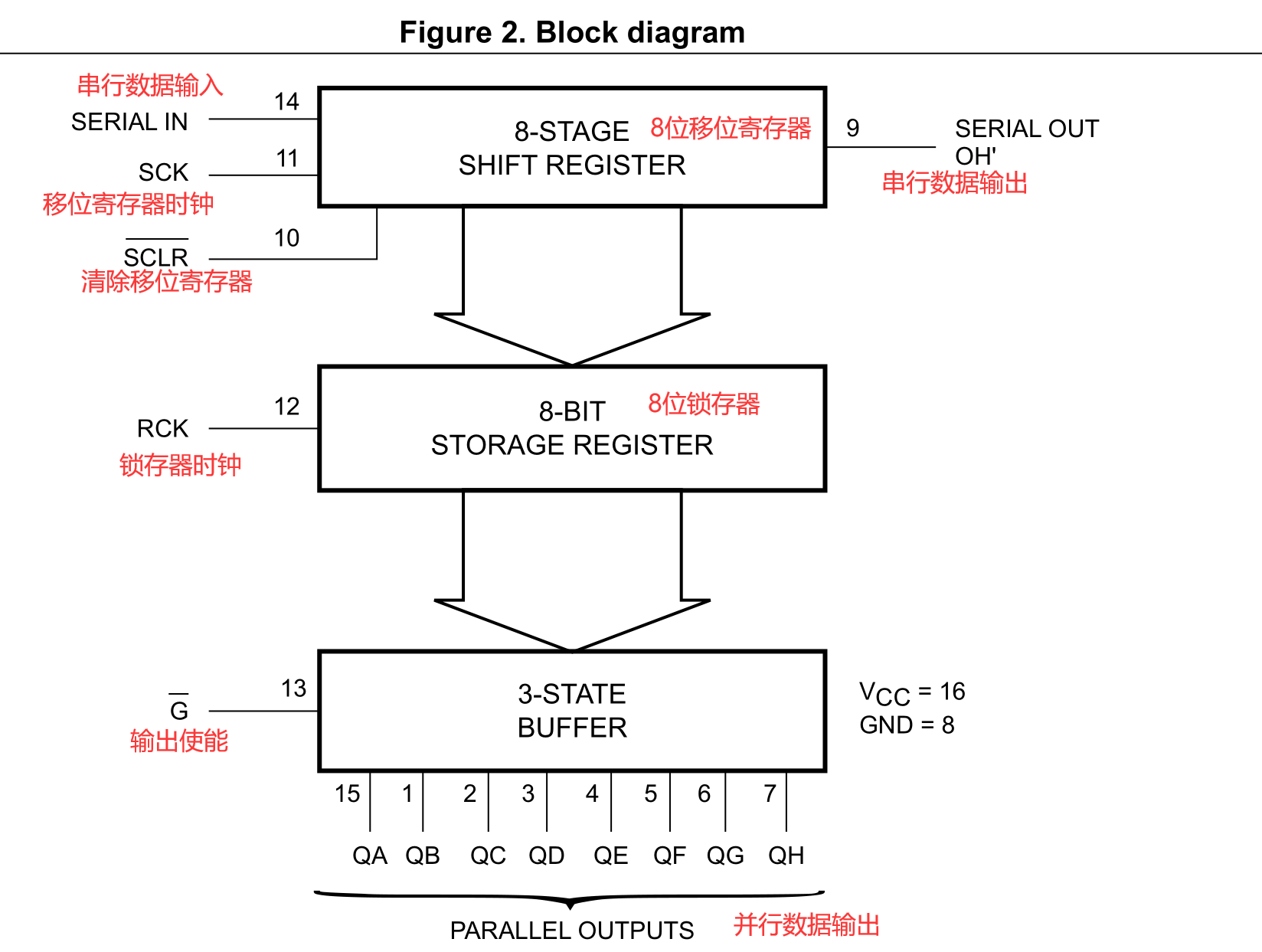
芯片框图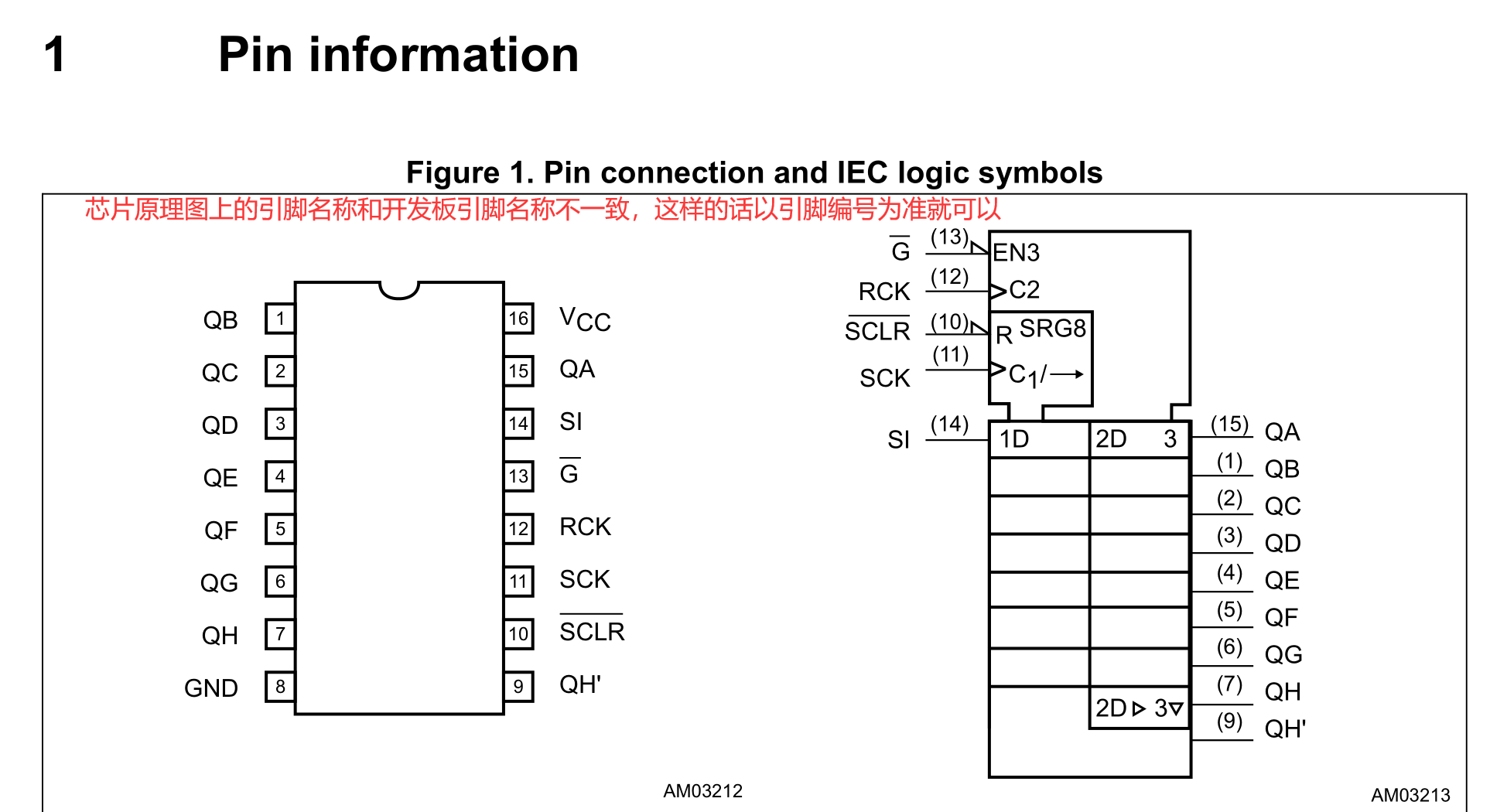
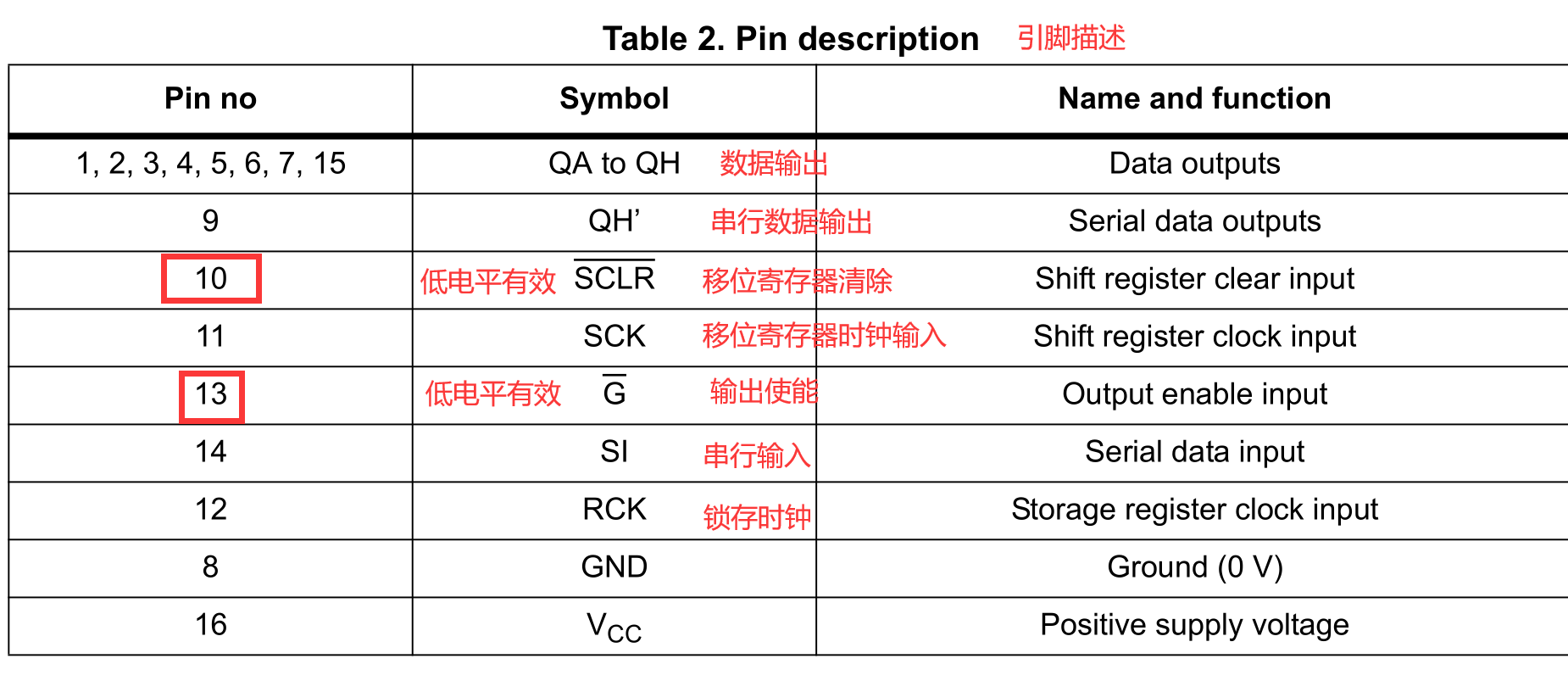
引脚描述
工作原理
真值表

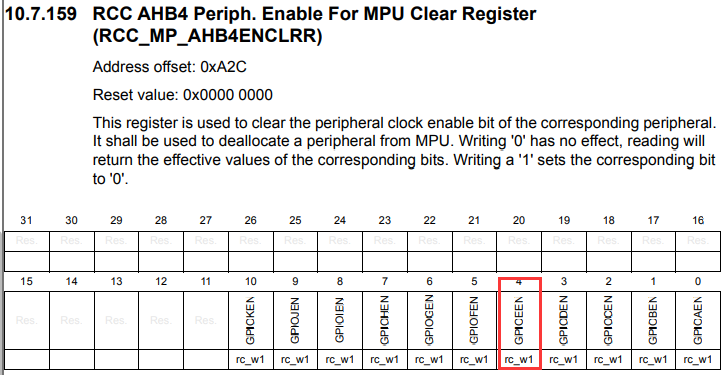
RCC章节分析
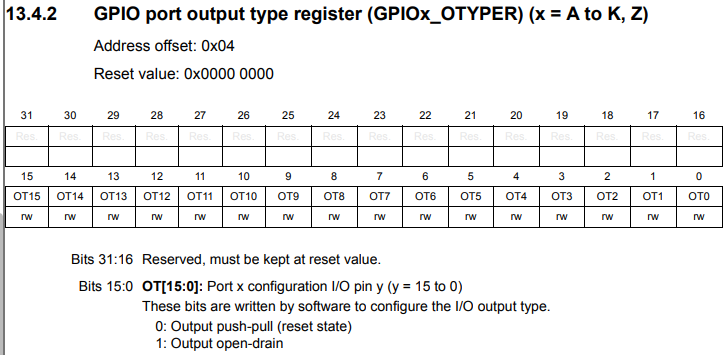
GPIO章节分析
将PE11、PE12、PE14引脚设为输出模式,PE13引脚设为输入模式

将PE11、PE12、PE14引脚设为推挽输出
jiang
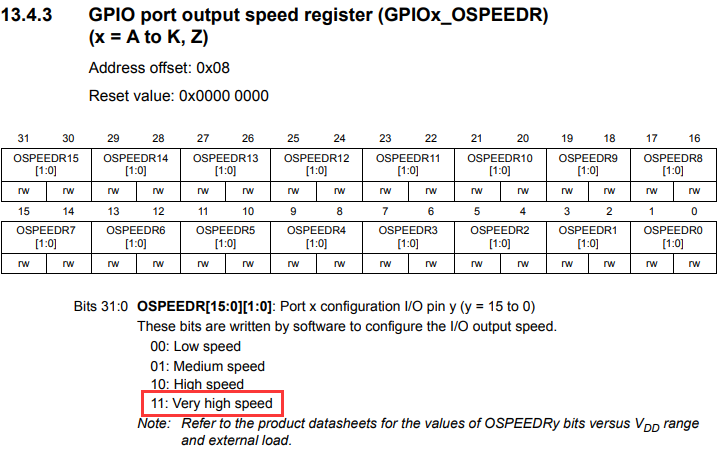
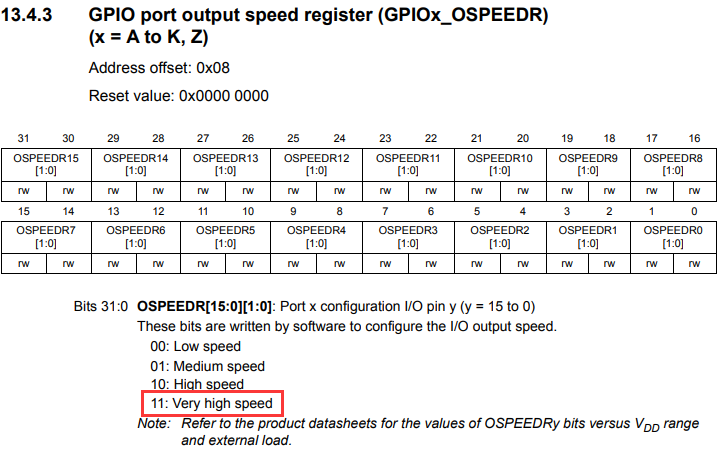
设为超高速
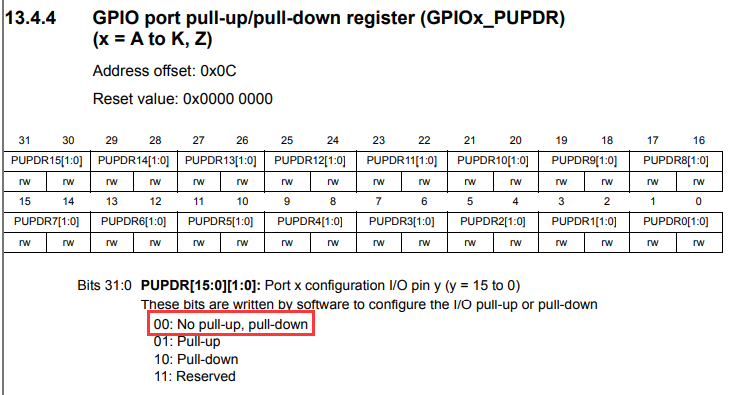
都设置为禁止上下拉
代码示例
spi.h
#ifndef __SPI_H__
#define __SPI_H__
#include "stm32mp1xx_gpio.h"
#include "stm32mp1xx_rcc.h"
// MOSI对应的引脚输出高低电平的信号
#define MOSI_OUTPUT_H() do{GPIOE->ODR |= (0x1 << 14);}while(0)
#define MOSI_OUTPUT_L() do{GPIOE->ODR &= (~(0x1 << 14));}while(0)
// 对应595芯片的锁存引脚输出高低电平
#define NSS_OUTPUT_H() do{GPIOE->ODR |= (0x1 << 11);}while(0)
#define NSS_OUTPUT_L() do{GPIOE->ODR &= (~(0x1 << 11));}while(0)
// 时钟信号对应的引脚输出高低电平
#define SCK_OUTPUT_H() do{GPIOE->ODR |= (0x1 << 12);}while(0)
#define SCK_OUTPUT_L() do{GPIOE->ODR &= (~(0x1 << 12));}while(0)
/*
* 函数功能: SPI初始化函数,推挽输出,高速,禁止上拉和下拉
* 函数参数:无
* 函数返回值:无
*/
void SPI_init(void);
/*
* 函数功能:SPI发送数据的函数
* 函数参数:dat : 要发送的数据
* 函数返回值:无
*
*/
void SPI_write(unsigned char dat);
#endif // __SPI_H__
spi.c
#include "spi.h"
/* SPI4_NSS ----> PE11
* SPI4_SCK ----> PE12
* SPI4_MOSI ----> PE14
* SPI4_MISO ----> PE13
* */
/* 数码管的编码, 先发送低位,在发送高位
* A B C D E F G DP
* 1 1 1 1 1 1 0 0 0xFC 0
* 0 1 1 0 0 0 0 0 0x60 1
* 1 1 0 1 1 0 1 0 0xDA 2
* 1 1 1 1 0 0 1 0 0xF2 3
* 0 1 1 0 0 1 1 0 0x66 4
* 1 0 1 1 0 1 1 0 0xB6 5
* 1 0 1 1 1 1 1 0 0xBE 6
* 1 1 1 0 0 0 0 0 0xE0 7
* 1 1 1 1 1 1 1 0 0xFE 8
* 1 1 1 1 0 1 1 0 0xF6 9
* */
void delay_us1(unsigned int us)
{
int i,j;
for(i = 0; i < us;i++)
for (j = 0; j < 1;j++);
}
void SPI_init(void)
{
RCC->MP_AHB4ENSETR |= (0x1 << 4);
// MOSI PE14
GPIOE->MODER &= (~(0x3 << 28));
GPIOE->MODER |= (0x1 << 28);
GPIOE->OTYPER &= (~(0x1 << 14));
GPIOE->OSPEEDR &= (~(0x3 << 28));
// GPIOE->OSPEEDR |= (0x2 << 28);
GPIOE->PUPDR &= (~(0x3 << 28));
// MISO PE13
GPIOE->MODER &= (~(0x3 << 26));
GPIOE->OSPEEDR &= (~(0x3 << 26));
// GPIOE->OSPEEDR |= (0x2 << 26);
GPIOE->PUPDR &= (~(0x3 << 26));
// SCK PE12
GPIOE->MODER &= (~(0x3 << 24));
GPIOE->MODER |= (0x1 << 24);
GPIOE->OTYPER &= (~(0x1 << 12));
GPIOE->OSPEEDR &= (~(0x3 << 24));
// GPIOE->OSPEEDR |= (0x2 << 24);
GPIOE->PUPDR &= (~(0x3 << 24));
// NSS PE11
GPIOE->MODER &= (~(0x3 << 22));
GPIOE->MODER |= (0x1 << 22);
GPIOE->OTYPER &= (~(0x1 << 11));
GPIOE->OSPEEDR &= (~(0x3 << 22));
// GPIOE->OSPEEDR |= (0x2 << 22);
GPIOE->PUPDR &= (~(0x3 << 22));
NSS_OUTPUT_L(); // 595芯片的锁存引脚拉低
SCK_OUTPUT_L(); // SPI的时钟线拉低
}
void SPI_write(unsigned char dat)
{
unsigned char i;
for(i = 0; i < 8; i++)
{
if(dat & 0x01)
{
MOSI_OUTPUT_H(); // MOSI线写高
} else {
MOSI_OUTPUT_L(); // MOSI线写低
}
dat >>= 1;
// 时钟线从低电平到高电平的变化时,MOSI数据线上的数据
// 被写到595芯片的移位寄存器中
SCK_OUTPUT_L(); // SCK拉低
delay_us1(10);
SCK_OUTPUT_H(); // SCK拉高
delay_us1(10);
}
//NSS_OUTPUT_L();
//NSS_OUTPUT_H();
}
main.c
#include "gpio.h"
#include "uart4.h"
#include "command.h"
#include "beep.h"
#include "key-TI.h"
#include "si7006.h"
#include "spi.h"
extern void printf(const char *fmt, ...);
void delay_ms(int ms)
{
int i,j;
for(i = 0; i < ms;i++)
for (j = 0; j < 1800; j++);
}
void led_init(void)
{
RCC_MP_AHB4ENSETR |= (0x3 << 4);
// gpio_init_t init = {GPIO_OUTPUT,GPIO_PP,LOW_SPEED,NOPUPD};
/*
gpio_init_t init;
init.mode = GPIO_OUTPUT;
init.type = GPIO_PP;
init.speed = LOW_SPEED;
init.pupd = NOPUPD;
*/
gpio_init_t gpio_init = {
.mode = GPIO_OUTPUT,
.type = GPIO_PP,
.speed = LOW_SPEED,
.pupd = NOPUPD,
};
hal_gpio_init(GPIOE, &gpio_init, GPIO_PIN_10);
hal_gpio_init(GPIOF, &gpio_init, GPIO_PIN_10);
hal_gpio_init(GPIOE, &gpio_init, GPIO_PIN_8);
}
void led_flash(void)
{
hal_gpio_write(GPIOE, GPIO_PIN_10, GPIO_SET);
delay_ms(500);
hal_gpio_write(GPIOE, GPIO_PIN_10, GPIO_RESET);
delay_ms(500);
}
int num[10] = {0xFC,0x60,0xDA,0xF2,0x66,0xB6,0xBE,0xE0,0xFE,0xF6};
int main(void)
{
unsigned char i;
SPI_init();
while(1)
{
#if 1
for(i = 0; i < 10; i++)
{
SPI_write(0xF0); // 发送数码管的位
SPI_write(num[i]); // 发送数码管的段
NSS_OUTPUT_L();
delay_ms(1);
NSS_OUTPUT_H(); // 锁存的时钟从低到高的变化
// 将移位寄存器中的数据锁存到锁存寄存器中
delay_ms(1000);
}
#else
for(i = 0; i < 4; i++)
{
SPI_write(0x80 >> i);
SPI_write(num[i+1]);
NSS_OUTPUT_L();
delay_ms(1);
NSS_OUTPUT_H();
}
#endif
}
return 0;
}
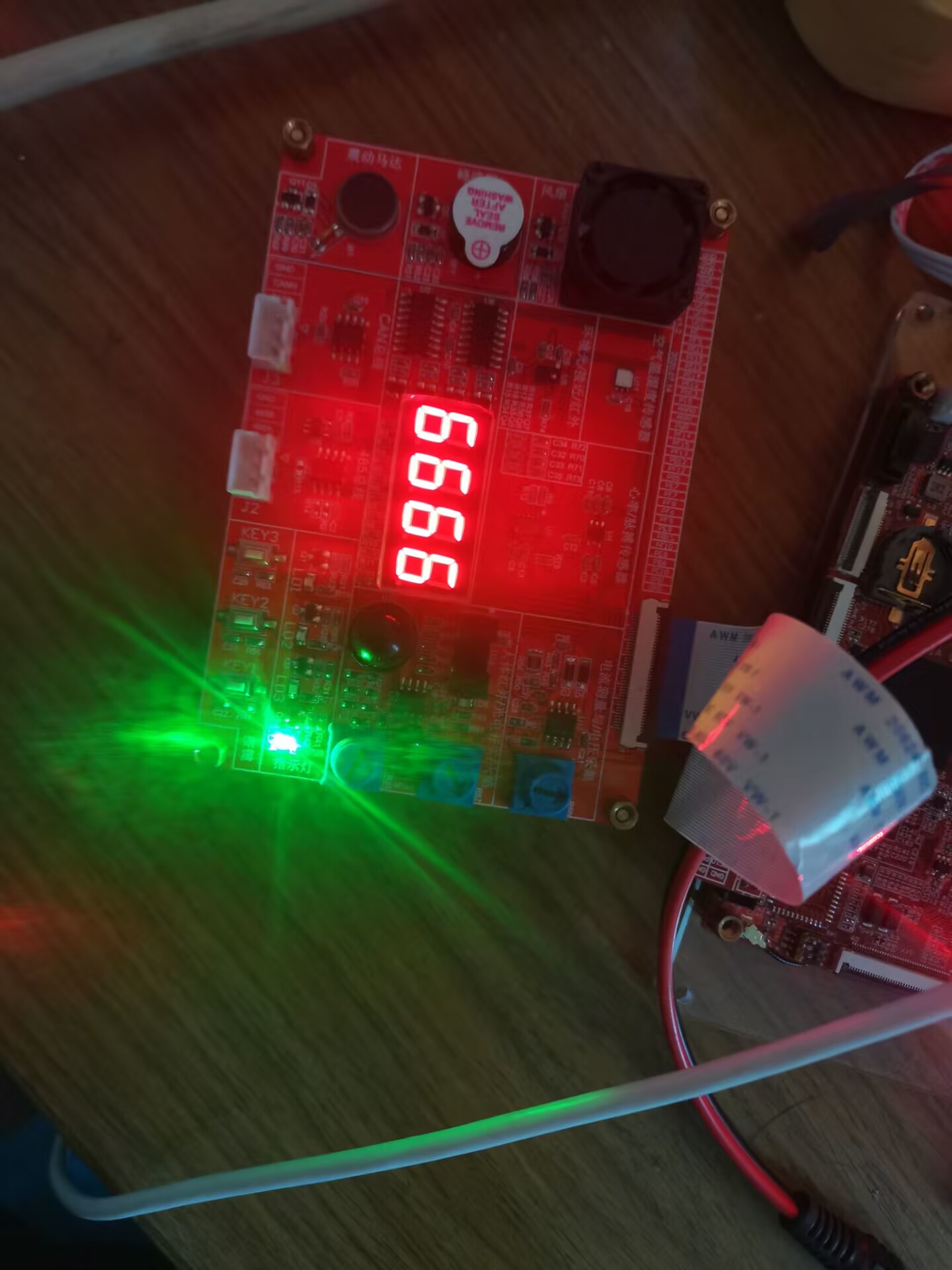
测试结果
















 232
232











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











