







- Series
Part 1: compile opencv on ubuntu 16.04
Part 2: compile opencv with CUDA support on windows 10
Part 3: opencv mat for loop
Part 4: speed up opencv image processing with openmp
- Guide
Mat
- for gray image, use type <uchar>
- for RGB color image,use type <Vec3b>
gray format storage
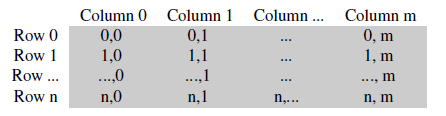
color format storage: BGR

we can use method isContinuous() to judge whether the memory buffer is continuous or not.
color space reduction
uchar color_space_reduction(uchar pixel)
{
/*
0-9 ===>0
10-19===>10
20-29===>20
...
240-249===>24
250-255===>25
map from 256*256*256===>26*26*26
*/
int divideWith = 10;
uchar new_pixel = (pixel / divideWith)*divideWith;
return new_pixel;
}
color table
void get_color_table()
{
// cache color value in table[256]
int divideWith = 10;
uchar table[256];
for (int i = 0; i < 256; ++i)
table[i] = divideWith* (i / divideWith);
}
- C++
ptr []
// C ptr []: faster but not safe
Mat& ScanImageAndReduce_Cptr(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
int channels = I.channels();
int nRows = I.rows;
int nCols = I.cols* channels;
if (I.isContinuous())
{
nCols *= nRows;
nRows = 1;
}
int i, j;
uchar* p;
for (i = 0; i < nRows; ++i)
{
p = I.ptr<uchar>(i);
for (j = 0; j < nCols; ++j)
{
p[j] = table[p[j]];
}
}
return I;
}
ptr ++
// C ptr ++: faster but not safe
Mat& ScanImageAndReduce_Cptr2(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
int channels = I.channels();
int nRows = I.rows;
int nCols = I.cols* channels;
if (I.isContinuous())
{
nCols *= nRows;
nRows = 1;
}
uchar* start = I.ptr<uchar>(0); // same as I.ptr<uchar>(0,0)
uchar* end = start + nRows * nCols;
for (uchar* p=start; p < end; ++p)
{
*p = table[*p];
}
return I;
}
at(i,j)
// at<uchar>(i,j): random access, slow
Mat& ScanImageAndReduce_atRandomAccess(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
const int channels = I.channels();
switch (channels)
{
case 1:
{
for (int i = 0; i < I.rows; ++i)
for (int j = 0; j < I.cols; ++j)
I.at<uchar>(i, j) = table[I.at<uchar>(i, j)];
break;
}
case 3:
{
Mat_<Vec3b> _I = I;
for (int i = 0; i < I.rows; ++i)
for (int j = 0; j < I.cols; ++j)
{
_I(i, j)[0] = table[_I(i, j)[0]];
_I(i, j)[1] = table[_I(i, j)[1]];
_I(i, j)[2] = table[_I(i, j)[2]];
}
I = _I;
break;
}
}
return I;
}
Iterator
// MatIterator_<uchar>: safe but slow
Mat& ScanImageAndReduce_Iterator(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
const int channels = I.channels();
switch (channels)
{
case 1:
{
MatIterator_<uchar> it, end;
for (it = I.begin<uchar>(), end = I.end<uchar>(); it != end; ++it)
*it = table[*it];
break;
}
case 3:
{
MatIterator_<Vec3b> it, end;
for (it = I.begin<Vec3b>(), end = I.end<Vec3b>(); it != end; ++it)
{
(*it)[0] = table[(*it)[0]];
(*it)[1] = table[(*it)[1]];
(*it)[2] = table[(*it)[2]];
}
}
}
return I;
}
opencv LUT
// LUT
Mat& ScanImageAndReduce_LUT(Mat& I, const uchar* const table)
{
Mat lookUpTable(1, 256, CV_8U);
uchar* p = lookUpTable.data;
for (int i = 0; i < 256; ++i)
p[i] = table[i];
cv::LUT(I, lookUpTable, I);
return I;
}
forEach
forEach method of the Mat class that utilizes all the cores on your machine to apply any function at every pixel.
// Parallel execution with function object.
struct ForEachOperator
{
uchar m_table[256];
ForEachOperator(const uchar* const table)
{
for (size_t i = 0; i < 256; i++)
{
m_table[i] = table[i];
}
}
void operator ()(uchar& p, const int * position) const
{
// Perform a simple operation
p = m_table[p];
}
};
// forEach use multiple processors, very fast
Mat& ScanImageAndReduce_forEach(Mat& I, const uchar* const table)
{
I.forEach<uchar>(ForEachOperator(table));
return I;
}
forEach with lambda
// forEach lambda use multiple processors, very fast (lambda slower than ForEachOperator)
Mat& ScanImageAndReduce_forEach_with_lambda(Mat& I, const uchar* const table)
{
I.forEach<uchar>
(
[=](uchar &p, const int * position) -> void
{
p = table[p];
}
);
return I;
}
time cost
no foreach
[1 Cptr ] times=5000, total_cost=988 ms, avg_cost=0.1976 ms
[1 Cptr2 ] times=5000, total_cost=1704 ms, avg_cost=0.3408 ms
[2 atRandom] times=5000, total_cost=9611 ms, avg_cost=1.9222 ms
[3 Iterator] times=5000, total_cost=20195 ms, avg_cost=4.039 ms
[4 LUT ] times=5000, total_cost=899 ms, avg_cost=0.1798 ms
[1 Cptr ] times=10000, total_cost=2425 ms, avg_cost=0.2425 ms
[1 Cptr2 ] times=10000, total_cost=3391 ms, avg_cost=0.3391 ms
[2 atRandom] times=10000, total_cost=20024 ms, avg_cost=2.0024 ms
[3 Iterator] times=10000, total_cost=39980 ms, avg_cost=3.998 ms
[4 LUT ] times=10000, total_cost=103 ms, avg_cost=0.0103 ms
foreach
[5 forEach ] times=200000, total_cost=199 ms, avg_cost=0.000995 ms
[5 forEach lambda] times=200000, total_cost=521 ms, avg_cost=0.002605 ms
[5 forEach ] times=20000, total_cost=17 ms, avg_cost=0.00085 ms
[5 forEach lambda] times=20000, total_cost=23 ms, avg_cost=0.00115 ms
results
| Loop Type | Time Cost (us) |
|---|---|
| ptr [] | 242 |
| ptr ++ | 339 |
| at | 2002 |
| iterator | 3998 |
| LUT | 10 |
| forEach | 0.85 |
| forEach lambda | 1.15 |
forEach is 10x times faster than LUT, 240~340x times faster than ptr [] and ptr ++, and 2000~4000x times faster than at and iterator.
code
#include <stdio.h>
#include <iostream>
#pragma warning( disable: 4819 )
#pragma warning( disable: 4244 )
#pragma warning( disable: 4267 )
#include "opencv2/core.hpp"
#include "opencv2/imgproc.hpp"
#include "opencv2/features2d.hpp"
#include "opencv2/highgui.hpp"
#include "opencv2/calib3d.hpp"
#include <boost/date_time/posix_time/posix_time.hpp>
using namespace std;
using namespace cv;
//#define SAVE_IMAGE
uchar color_space_reduction(uchar pixel)
{
/*
0-9 ===>0
10-19===>10
20-29===>20
...
240-249===>24
250-255===>25
map from 256*256*256===>26*26*26
*/
int divideWith = 10;
uchar new_pixel = (pixel / divideWith)*divideWith;
return new_pixel;
}
void get_color_table()
{
// cache color value in table[256]
int divideWith = 10;
uchar table[256];
for (int i = 0; i < 256; ++i)
table[i] = divideWith* (i / divideWith);
}
// C ptr []: faster but not safe
Mat& ScanImageAndReduce_Cptr(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
int channels = I.channels();
int nRows = I.rows;
int nCols = I.cols* channels;
if (I.isContinuous())
{
nCols *= nRows;
nRows = 1;
}
int i, j;
uchar* p;
for (i = 0; i < nRows; ++i)
{
p = I.ptr<uchar>(i);
for (j = 0; j < nCols; ++j)
{
p[j] = table[p[j]];
}
}
return I;
}
// C ptr ++: faster but not safe
Mat& ScanImageAndReduce_Cptr2(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
int channels = I.channels();
int nRows = I.rows;
int nCols = I.cols* channels;
if (I.isContinuous())
{
nCols *= nRows;
nRows = 1;
}
uchar* start = I.ptr<uchar>(0); // same as I.ptr<uchar>(0,0)
uchar* end = start + nRows * nCols;
for (uchar* p=start; p < end; ++p)
{
*p = table[*p];
}
return I;
}
// at<uchar>(i,j): random access, slow
Mat& ScanImageAndReduce_atRandomAccess(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
const int channels = I.channels();
switch (channels)
{
case 1:
{
for (int i = 0; i < I.rows; ++i)
for (int j = 0; j < I.cols; ++j)
I.at<uchar>(i, j) = table[I.at<uchar>(i, j)];
break;
}
case 3:
{
Mat_<Vec3b> _I = I;
for (int i = 0; i < I.rows; ++i)
for (int j = 0; j < I.cols; ++j)
{
_I(i, j)[0] = table[_I(i, j)[0]];
_I(i, j)[1] = table[_I(i, j)[1]];
_I(i, j)[2] = table[_I(i, j)[2]];
}
I = _I;
break;
}
}
return I;
}
// MatIterator_<uchar>: safe but slow
Mat& ScanImageAndReduce_Iterator(Mat& I, const uchar* const table)
{
// accept only char type matrices
CV_Assert(I.depth() != sizeof(uchar));
const int channels = I.channels();
switch (channels)
{
case 1:
{
MatIterator_<uchar> it, end;
for (it = I.begin<uchar>(), end = I.end<uchar>(); it != end; ++it)
*it = table[*it];
break;
}
case 3:
{
MatIterator_<Vec3b> it, end;
for (it = I.begin<Vec3b>(), end = I.end<Vec3b>(); it != end; ++it)
{
(*it)[0] = table[(*it)[0]];
(*it)[1] = table[(*it)[1]];
(*it)[2] = table[(*it)[2]];
}
}
}
return I;
}
// LUT
Mat& ScanImageAndReduce_LUT(Mat& I, const uchar* const table)
{
Mat lookUpTable(1, 256, CV_8U);
uchar* p = lookUpTable.data;
for (int i = 0; i < 256; ++i)
p[i] = table[i];
cv::LUT(I, lookUpTable, I);
return I;
}
#pragma region forEach
// Parallel execution with function object.
struct ForEachOperator
{
uchar m_table[256];
ForEachOperator(const uchar* const table)
{
for (size_t i = 0; i < 256; i++)
{
m_table[i] = table[i];
}
}
void operator ()(uchar& p, const int * position) const
{
// Perform a simple operation
p = m_table[p];
}
};
// forEach use multiple processors, very fast
Mat& ScanImageAndReduce_forEach(Mat& I, const uchar* const table)
{
I.forEach<uchar>(ForEachOperator(table));
return I;
}
// forEach lambda use multiple processors, very fast (lambda slower than ForEachOperator)
Mat& ScanImageAndReduce_forEach_with_lambda(Mat& I, const uchar* const table)
{
I.forEach<uchar>
(
[=](uchar &p, const int * position) -> void
{
p = table[p];
}
);
return I;
}
#pragma endregion
void test_cptr(Mat& image, const uchar* const table, int times)
{
int64_t total_cost = 0;
for (size_t i = 0; i < times; i++)
{
boost::posix_time::ptime pt1 = boost::posix_time::microsec_clock::local_time();
image = ScanImageAndReduce_Cptr(image, table);
boost::posix_time::ptime pt2 = boost::posix_time::microsec_clock::local_time();
int64_t cost = (pt2 - pt1).total_milliseconds();
total_cost += cost;
#ifdef SAVE_IMAGE
cv::imwrite("./1_cptr.jpg", image);
#endif // SAVE_IMAGE
}
std::cout << "[1 Cptr] times=" << times << ", total_cost=" << total_cost << " ms, avg_cost=" << total_cost / (times*1.0) << " ms \n";
}
void test_cptr2(Mat& image, const uchar* const table, int times)
{
int64_t total_cost = 0;
for (size_t i = 0; i < times; i++)
{
boost::posix_time::ptime pt1 = boost::posix_time::microsec_clock::local_time();
image = ScanImageAndReduce_Cptr2(image, table);
boost::posix_time::ptime pt2 = boost::posix_time::microsec_clock::local_time();
int64_t cost = (pt2 - pt1).total_milliseconds();
total_cost += cost;
#ifdef SAVE_IMAGE
cv::imwrite("./1_cptr2.jpg", image);
#endif // SAVE_IMAGE
}
std::cout << "[1 Cptr2] times=" << times << ", total_cost=" << total_cost << " ms, avg_cost=" << total_cost / (times*1.0) << " ms \n";
}
void test_at_random_access(Mat& image, const uchar* const table, int times)
{
int64_t total_cost = 0;
for (size_t i = 0; i < times; i++)
{
boost::posix_time::ptime pt1 = boost::posix_time::microsec_clock::local_time();
image = ScanImageAndReduce_atRandomAccess(image, table);
boost::posix_time::ptime pt2 = boost::posix_time::microsec_clock::local_time();
int64_t cost = (pt2 - pt1).total_milliseconds();
total_cost += cost;
#ifdef SAVE_IMAGE
cv::imwrite("./1_at_random.jpg", image);
#endif // SAVE_IMAGE
}
std::cout << "[2 atRandom] times=" << times << ", total_cost=" << total_cost << " ms, avg_cost=" << total_cost / (times*1.0) << " ms \n";
}
void test_iterator(Mat& image, const uchar* const table, int times)
{
int64_t total_cost = 0;
for (size_t i = 0; i < times; i++)
{
boost::posix_time::ptime pt1 = boost::posix_time::microsec_clock::local_time();
image = ScanImageAndReduce_Iterator(image, table);
boost::posix_time::ptime pt2 = boost::posix_time::microsec_clock::local_time();
int64_t cost = (pt2 - pt1).total_milliseconds();
total_cost += cost;
#ifdef SAVE_IMAGE
cv::imwrite("./1_iterator.jpg", image);
#endif // SAVE_IMAGE
}
std::cout << "[3 Iterator] times=" << times << ", total_cost=" << total_cost << " ms, avg_cost=" << total_cost / (times*1.0) << " ms \n";
}
void test_lut(Mat& image, const uchar* const table, int times)
{
Mat lookUpTable(1, 256, CV_8U);
uchar* p = lookUpTable.data;
for (int i = 0; i < 256; ++i)
p[i] = table[i];
int64_t total_cost = 0;
for (size_t i = 0; i < times; i++)
{
boost::posix_time::ptime pt1 = boost::posix_time::microsec_clock::local_time();
cv::LUT(image, lookUpTable, image); // LUT
boost::posix_time::ptime pt2 = boost::posix_time::microsec_clock::local_time();
int64_t cost = (pt2 - pt1).total_milliseconds();
total_cost += cost;
#ifdef SAVE_IMAGE
cv::imwrite("./1_lut.jpg", image);
#endif // SAVE_IMAGE
}
std::cout << "[4 LUT] times=" << times << ", total_cost=" << total_cost << " ms, avg_cost=" << total_cost / (times*1.0) << " ms \n";
}
void test_for_each(Mat& image, const uchar* const table, int times)
{
int64_t total_cost = 0;
for (size_t i = 0; i < times; i++)
{
boost::posix_time::ptime pt1 = boost::posix_time::microsec_clock::local_time();
image = ScanImageAndReduce_forEach(image, table);
boost::posix_time::ptime pt2 = boost::posix_time::microsec_clock::local_time();
int64_t cost = (pt2 - pt1).total_milliseconds();
total_cost += cost;
#ifdef SAVE_IMAGE
cv::imwrite("./1_foreach.jpg", image);
#endif // SAVE_IMAGE
}
std::cout << "[5 forEach] times=" << times << ", total_cost=" << total_cost << " ms, avg_cost=" << total_cost / (times*1.0) << " ms \n";
}
void test_for_each_with_lambda(Mat& image, const uchar* const table, int times)
{
int64_t total_cost = 0;
for (size_t i = 0; i < times; i++)
{
boost::posix_time::ptime pt1 = boost::posix_time::microsec_clock::local_time();
image = ScanImageAndReduce_forEach_with_lambda(image, table);
boost::posix_time::ptime pt2 = boost::posix_time::microsec_clock::local_time();
int64_t cost = (pt2 - pt1).total_milliseconds();
total_cost += cost;
#ifdef SAVE_IMAGE
cv::imwrite("./1_foreach_with_lambda.jpg", image);
#endif // SAVE_IMAGE
}
std::cout << "[5 forEach lambda] times=" << times << ", total_cost=" << total_cost << " ms, avg_cost=" << total_cost / (times*1.0) << " ms \n";
}
int main(int argc, char const *argv[])
{
// table
int divideWith = 52;
uchar table[256];
for (int i = 0; i < 256; ++i)
table[i] = divideWith* (i / divideWith);
// image
Mat image = cv::imread("./1.jpg", 0);
//cv::imshow("image", image);
//cv::waitKey(0);
std::cout << image.size() << std::endl;
if (image.isContinuous())
{
std::cout << " image is continuous. \n";
}
bool no_foreach = true;
if (no_foreach)
{
int times = 5000;
test_cptr(image, table, times); // ptr[i]
test_cptr2(image, table, times); // ptr++
test_at_random_access(image, table, times);
test_iterator(image, table, times);
test_lut(image, table, times);
}
else {
int times = 20000;
test_for_each(image, table, times);
test_for_each_with_lambda(image, table, times);
}
std::cout << "Press enter to exit \n";
char c;
cin >> c;
return 0;
}
/*
[2048 x 1024]
image is continuous.
[1 Cptr] times=5000, total_cost=988 ms, avg_cost=0.1976 ms
[1 Cptr2] times=5000, total_cost=1704 ms, avg_cost=0.3408 ms
[2 atRandom] times=5000, total_cost=9611 ms, avg_cost=1.9222 ms
[3 Iterator] times=5000, total_cost=20195 ms, avg_cost=4.039 ms
[4 LUT] times=5000, total_cost=899 ms, avg_cost=0.1798 ms
[1 Cptr] times=10000, total_cost=2425 ms, avg_cost=0.2425 ms
[1 Cptr2] times=10000, total_cost=3391 ms, avg_cost=0.3391 ms
[2 atRandom] times=10000, total_cost=20024 ms, avg_cost=2.0024 ms
[3 Iterator] times=10000, total_cost=39980 ms, avg_cost=3.998 ms
[4 LUT] times=10000, total_cost=103 ms, avg_cost=0.0103 ms
[5 forEach] times=200000, total_cost=199 ms, avg_cost=0.000995 ms
[5 forEach lambda] times=200000, total_cost=521 ms, avg_cost=0.002605 ms
[5 forEach] times=20000, total_cost=17 ms, avg_cost=0.00085 ms
[5 forEach lambda] times=20000, total_cost=23 ms, avg_cost=0.00115 ms
*/
- Python
pure python
# import the necessary packages
import matplotlib.pyplot as plt
import cv2
print(cv2.__version__)
%matplotlib inline
3.4.2
# load the original image, convert it to grayscale, and display
# it inline
image = cv2.imread("cat.jpg")
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
print(image.shape)
#plt.imshow(image, cmap="gray")
(360, 480)
%load_ext cython
The cython extension is already loaded. To reload it, use:
%reload_ext cython
%%cython -a
def threshold_python(T, image):
# grab the image dimensions
h = image.shape[0]
w = image.shape[1]
# loop over the image, pixel by pixel
for y in range(0, h):
for x in range(0, w):
# threshold the pixel
image[y, x] = 255 if image[y, x] >= T else 0
# return the thresholded image
return image
%timeit threshold_python(5, image)
263 ms ± 20.2 ms per loop (mean ± std. dev. of 7 runs, 1 loop each)
cython
%%cython -a
import cython
@cython.boundscheck(False)
cpdef unsigned char[:, :] threshold_cython(int T, unsigned char [:, :] image):
# set the variable extension types
cdef int x, y, w, h
# grab the image dimensions
h = image.shape[0]
w = image.shape[1]
# loop over the image
for y in range(0, h):
for x in range(0, w):
# threshold the pixel
image[y, x] = 255 if image[y, x] >= T else 0
# return the thresholded image
return image
numba
%timeit threshold_cython(5, image)
150 µs ± 7.14 µs per loop (mean ± std. dev. of 7 runs, 10000 loops each)
from numba import njit
@njit
def threshold_njit(T, image):
# grab the image dimensions
h = image.shape[0]
w = image.shape[1]
# loop over the image, pixel by pixel
for y in range(0, h):
for x in range(0, w):
# threshold the pixel
image[y, x] = 255 if image[y, x] >= T else 0
# return the thresholded image
return image
%timeit threshold_njit(5, image)
43.5 µs ± 142 ns per loop (mean ± std. dev. of 7 runs, 10000 loops each)
numpy
def threshold_numpy(T, image):
image[image > T] = 255
return image
%timeit threshold_numpy(5, image)
111 µs ± 334 ns per loop (mean ± std. dev. of 7 runs, 10000 loops each)
conclusions
image = cv2.imread("cat.jpg")
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
print(image.shape)
%timeit threshold_python(5, image)
%timeit threshold_cython(5, image)
%timeit threshold_njit(5, image)
%timeit threshold_numpy(5, image)
(360, 480)
251 ms ± 6.5 ms per loop (mean ± std. dev. of 7 runs, 1 loop each)
143 µs ± 1.19 µs per loop (mean ± std. dev. of 7 runs, 10000 loops each)
43.8 µs ± 284 ns per loop (mean ± std. dev. of 7 runs, 10000 loops each)
113 µs ± 957 ns per loop (mean ± std. dev. of 7 runs, 10000 loops each)
image = cv2.imread("big.jpg")
image = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
print(image.shape)
%timeit threshold_python(5, image)
%timeit threshold_cython(5, image)
%timeit threshold_njit(5, image)
%timeit threshold_numpy(5, image)
(2880, 5120)
21.8 s ± 460 ms per loop (mean ± std. dev. of 7 runs, 1 loop each)
12.3 ms ± 231 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
3.91 ms ± 66.1 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
10.3 ms ± 179 µs per loop (mean ± std. dev. of 7 runs, 100 loops each)
60,480
- python: 251 ms
- cython: 143 us
- numba: 43 us
- numpy: 113 us
2880, 5120
- python: 21 s
- cython: 12 ms
- numba: 4 ms
- numpy: 10 ms
- Reference
parallel-pixel-access-in-opencv-using-foreach
fast-optimized-for-pixel-loops-with-opencv-and-python
python performance tips
History
- 20180823: created.
Author: kezunlin
Link: https://kezunlin.me/post/61d55ab4/
Reprint policy: All articles in this blog are used except for special statements CC BY 4.0 reprint polocy. If reproduced, please indicate source kezunlin !















 2712
2712











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









