







1.应用模块
- 超声波模块

1.介绍:超声波传感器模块上面通常有两个超声波元器件,一个用于发射,一个用于接收。电路板上有四个引脚:VCC GND Trig(触发)
主要参数:
工作电压与电流:5V,15mA
感应距离: 2~400cm
感测角度: 不小于15°
被测物的面积不要小于50cm² 并且尽量平整
2.测距原理:
具备温度补偿电路
超声波模块的触发脚(Trig)输入10us 以上的高电位,即可发射超声波,发射超声波后,与接收到传回的超声波之前,”响应”脚(Echo)位呈现高电平。因此,程序可以从”响应”脚位(Echo)的高电平脉冲持续时间,换算出被测物的距离。
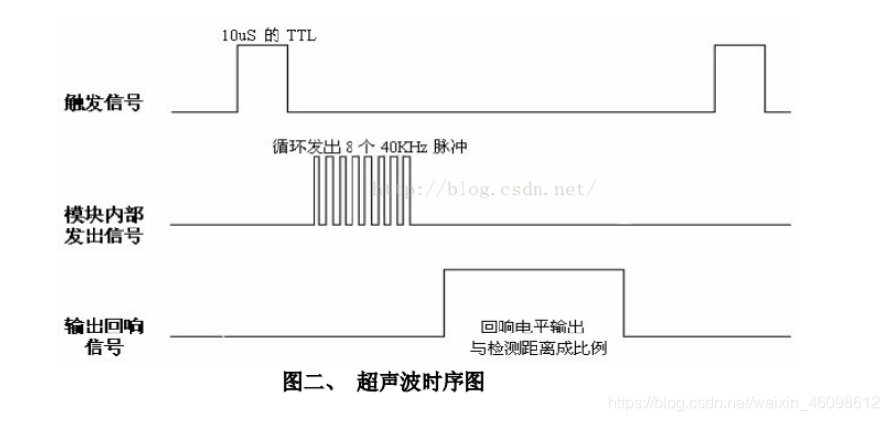
3.距离计算公式: 高电平持续时间 * 声速(340/秒) / 2
4.配置步骤
//1.中断组配置
//2.打开gpio和定时器时钟
//3.配置发送高电平trig引脚gpio PB11口和初始化
//4.配置EchoGPIO PB10和初始化
//5.定时器结构体的配置
//6.定时器中断结构体配置
//7.打开定时器4
//8.关闭定时器4
//定时器中断服务函数
//获取定时器计数器的值函数
//获取超声波测距距离函数
高电平维持时间
6.等待Echo引脚输入高电平开始,定时器打开—>开启计数器计数
7.等待Echo引脚输入高电平结束,定时器关闭—>停止计数器计数
8.通过计数器的值计算得出超声波测量距离
- SG9O电机

1.介绍:(略)
2.硬件接线:
红线 : 3.3v/ 5v
黑线 : GND
黄线 : 信号线
3.配置步骤
//1.打开gpio时钟//打开定时器时钟//打开引脚复用AFIO时钟
//2.选择重映射模式
//3.配置gpio结构体与初始化
//4.配置通用定时器结构体与初始化
//5.配置输出pwm波结构体与初始化
//6.自动加载预加载寄存器配置
//7.开启定时器
附上代码
超声波.c文件
#include "stm32f10x.h" // Device header
#include "SysTick.h"
#include "HC_SR04.h"
uint16_t mscount = 0; //extern 让main函数也能使用这里这个
void HC_SR04(void)
{
GPIO_InitTypeDef GPIO_HC_SR04init;//1.配置GPIO引脚结构体 Trig PB11 Echo PB10
TIM_TimeBaseInitTypeDef TIM_HC_SR04init;//2.配置定时器结构体
NVIC_InitTypeDef NVIC_HC_SR04init;//3.配置定时器中断结构体
//中断组配置
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
//1.打开gpio和定时器时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//4.开启时钟(定时器,GPIO)
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);
//配置发送高电平trig引脚gpio PB11口和初始化
GPIO_HC_SR04init.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_HC_SR04init.GPIO_Pin = GPIO_Pin_11;
GPIO_HC_SR04init.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_HC_SR04init );
//配置EchoGPIO PB10和初始化
GPIO_HC_SR04init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_HC_SR04init.GPIO_Pin = GPIO_Pin_10;
GPIO_Init( GPIOB, &GPIO_HC_SR04init );
//定时器结构体的配置
TIM_HC_SR04init.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_HC_SR04init.TIM_CounterMode = TIM_CounterMode_Up;
TIM_HC_SR04init.TIM_Period = 100 - 1 ; //1ms
TIM_HC_SR04init.TIM_Prescaler = 72 - 1 ; //72M
TIM_TimeBaseInit( TIM4, &TIM_HC_SR04init);
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);
TIM_Cmd( TIM4, DISABLE ); //先关闭tim4
//定时器中断结构体配置
NVIC_HC_SR04init.NVIC_IRQChannel = TIM4_IRQn;
NVIC_HC_SR04init.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_HC_SR04init.NVIC_IRQChannelSubPriority = 0;
NVIC_HC_SR04init.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_HC_SR04init);
}
//打开定时器4
void Open_tim4(void)
{
TIM_SetCounter( TIM4, 0);
mscount = 0;
TIM_Cmd( TIM4, ENABLE );
}
//关闭定时器4
void Close_tim4(void)
{
TIM_Cmd( TIM4, DISABLE ); //关闭
}
//定时器中断服务函数
void TIM4_IRQHandler(void)
{
if ( TIM_GetITStatus(TIM4, TIM_IT_Update) != RESET) //判断是否发生中断
{
TIM_ClearITPendingBit(TIM4, TIM_IT_Update); //清楚标记位
mscount++; //记录发生的中断次数
}
}
//获取定时器计数器的值
int GetEcho_time(void)
{
uint32_t t = 0;
t = mscount * 1000; //发生了多少个中断 *1000
t += TIM_GetCounter(TIM4);
TIM4->CNT = 0;
ms_delay(50);
return t;
}
//获取超声波测距距离
float GetLength(void)
{
int i = 0;
uint16_t t = 0;
float length = 0;
float sum = 0;
while(i != 5)
{
TRIG_Send(1);
us_delay(20);
TRIG_Send(0);
while(ECHO_Reci == 0);
Open_tim4();
i=i+1;
while(ECHO_Reci == 1);
t = GetEcho_time();
length =((float) t / 58.0);
sum = sum +length;
}
length = sum / 5.0;
return length;
}
超声波.h文件
#ifndef _HC_SR04_H
#define _HC_SR04_H
#include "stm32f10x.h" // Device header
void HC_SR04(void);
void Open_tim4(void);
void Close_tim4(void);
int GetEcho_time(void);
float GetLength(void);
#define ECHO_Reci GPIO_ReadInputDataBit( GPIOB, GPIO_Pin_10)
#define TRIG_Send(a) if(a) \
GPIO_SetBits(GPIOB, GPIO_Pin_11); \
else \
GPIO_ResetBits(GPIOB, GPIO_Pin_11)
#endif
舵机.c文件
#include "stm32f10x.h" // Device header
#include "motor.h"
void motor_config(void)
{
GPIO_InitTypeDef GPIO_MotorInit; //1.GPIO结构体
TIM_TimeBaseInitTypeDef TIM_MotorInit; //2.配置通用定时器结构体
TIM_OCInitTypeDef TIMPWN_MotorInit; //3.配置定时去输出PWM结构体 +下边的 TIM_OC2Init TIM_OC2PreloadConfig TIM_Cmd
//1.打开gpio时钟//打开定时器时钟//打开引脚复用AFIO时钟
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOB, ENABLE); //4.1 打开GPIO时钟
RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM3, ENABLE); //4.2 打开定时器时钟
RCC_APB2PeriphClockCmd( RCC_APB2Periph_AFIO, ENABLE); //复用使能时钟
//2.选择重映射模式
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3 , ENABLE ); //4.3 部分重映射时钟
//3.配置gpio结构体与初始化
GPIO_MotorInit.GPIO_Mode = GPIO_Mode_AF_PP;//复用推挽输出
GPIO_MotorInit.GPIO_Pin = GPIO_Pin_5;
GPIO_MotorInit.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init( GPIOB, &GPIO_MotorInit );
//4.配置通用定时器结构体与初始化
TIM_MotorInit.TIM_ClockDivision = TIM_CKD_DIV1; //设置时钟分割
TIM_MotorInit.TIM_CounterMode = TIM_CounterMode_Up; //计数模式 TIM向上计数
TIM_MotorInit.TIM_Period = 200 - 1 ; //重装载值 设置在下一个更新事件装入活动的重装载值
TIM_MotorInit.TIM_Prescaler = 7200 - 1 ; //预分频 TIMx时钟频率预分频值
TIM_TimeBaseInit( TIM3, &TIM_MotorInit);
//5.配置输出pwm波结构体与初始化
TIMPWN_MotorInit.TIM_OCIdleState = TIM_OCMode_PWM1; //选择定时器模式1
TIMPWN_MotorInit.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIMPWN_MotorInit.TIM_OCPolarity = TIM_OCPolarity_Low; //选择有效输出极性
TIM_OC2Init( TIM3, &TIMPWN_MotorInit ); //选择的是定时器3的通道2 所以用OC2
//6.自动加载预加载寄存器配置
TIM_OC2PreloadConfig( TIM3, TIM_OCPreload_Enable);
TIM_Cmd( TIM3, ENABLE);
}















 512
512











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











