







目录
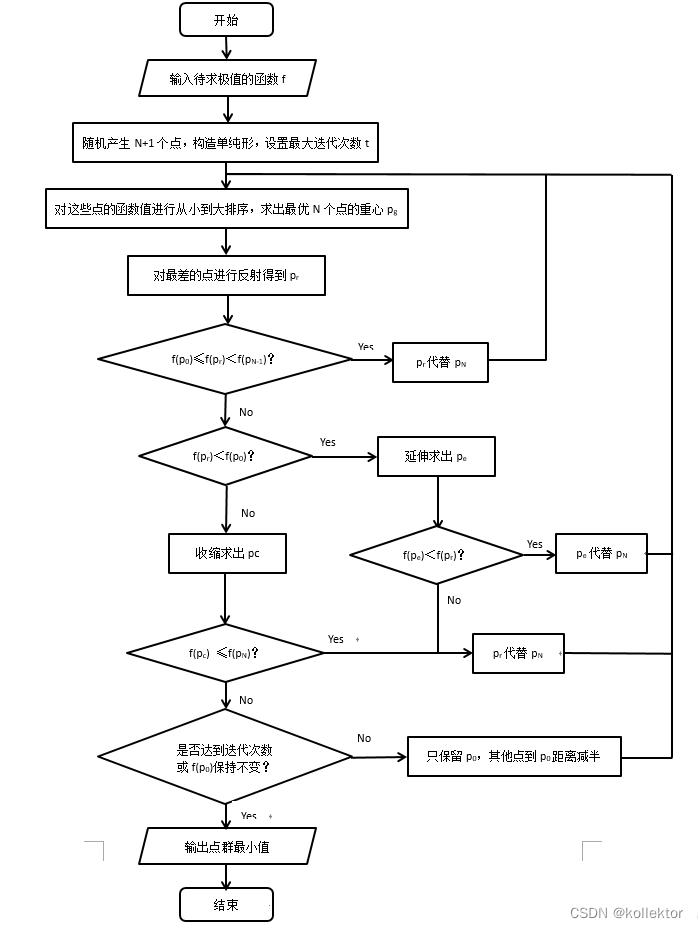
本算法可求解一般线性规划和整数线性规划问题
算法流程图
C语言实现
matrix.h
#ifndef MATRIX_H
#define MATRIX_H
/* matrix.h单纯形矩阵有关操作头文件 */
#include<stdio.h>
#include<stdlib.h>
#include<string.h>
#include<math.h>
//一字节八位
#define u8 unsigned char //无符号字符型 1字节
#define i8 char //字符型 1字节
#define u16 unsigned short int //无符号短整型 2字节
#define i16 short int //短整型 2字节
#define u32 unsigned int //无符号整型 4字节
#define i32 int //整型 4字节
typedef struct MATRIX { //矩阵数据结构
int col, row;
float **mem;
} MATRIX, *Matrix;
//创建row行col列的矩阵mat
bool Create_Matrix(Matrix mat, int row, int col);
//删除矩阵mat
void Delete_Matrix(Matrix mat);
//设置矩阵mat的数据
void Set_Matrix(Matrix mat, float* val);
//原矩阵src_mat复制到目标矩阵des_mat
void Copy_Matrix(Matrix des_mat, MATRIX src_mat);
//矩阵增加exp_num行
void Matrix_Expand_Row(Matrix mat, u32 exp_num, float* val);
//矩阵增加exp_num列
void Matrix_Expand_Column(Matrix mat, u32 exp_num, float* val);
//矩阵删除下标为row_index的行 下标从0开始计
void Matrix_Remove_Row(Matrix mat, int row_index);
//矩阵删除下标为col_index的列 下标从0开始计
void Matrix_Remove_Column(Matrix mat, int col_index);
//矩阵打印输出
void print_matrix(MATRIX mat);
#endifmatrix.c
/* matrix.c矩阵有关操作实现 */
#include"matrix.h"
u8 Create_Matrix(Matrix mat, int row, int col) {
int i;
mat->mem = (float**)malloc(row * sizeof(float*));
for (i = 0;i < row;i++) { //为mat的每一行分配col个元素空间
mat->mem[i] = (float*)malloc(col * sizeof(float));
}
if (mat->mem = NULL) {
printf("malloc fail\n");
return 1;
}
mat->row = row; //设置行数列数
mat->col = col;
return 0;
}
void Delete_Matrix(Matrix mat) {
int i;
for (i = 0;i < mat->row;i++) {
free(mat -> mem[i]); //释放mat每一行的col个元素空间
}
free(mat->mem); //释放mat的空间
}
void Set_Matrix(Matrix mat, float* val) {
int row, col;
for (row = 0;row < mat->row;row++) {
for (col = 0;col < mat->col;col++) {
mat->mem[row][col] = val[col + row * mat->col]; //矩阵数据保存在一维数组中,当前行标+当前列标*总列数即为映射关系
}
}
}
void Copy_Matrix(Matrix des_mat, MATRIX src_mat) {
int row, col;
if (des_mat->row != src_mat.row || des_mat->col != src_mat.col) {
printf("err, matrix attribute unmatched\n");
return;
}
for (row = 0;row < des_mat->row;row++) { //copy
for (col = 0;col < des_mat->col;col++) {
des_mat->mem[row][col] = src_mat.mem[row][col];
}
}
}
void Matrix_Expand_Row(Matrix mat,u32 exp_num,float *val) {
MATRIX temp; //缓存
int row, col;
u32 count = 0; //计数器
Create_Matrix(&temp, mat->row, mat->col); //建立缓存矩阵
Copy_Matrix(&temp, *mat); //将原矩阵复制到缓存矩阵中 目的传引用 源传指针
Delete_Matrix(mat); //删除原矩阵 重建添加exp_num行后的新矩阵
Create_Matrix(mat, temp.row + exp_num, temp.col);
for (row = 0;row < temp.row;row++) { //转移数据
for (col = 0;col < temp.col;col++) {
mat->mem[row][col] = temp.mem[row][col];
}
}
for (row = temp.row;row < mat->row;row++) { //添加数据
for (col = temp.col;col < mat->col;col++) {
mat->mem[row][col] = val[count++];
}
}
Delete_Matrix(&temp); //删除缓存矩阵
}
void Matrix_Expand_Column(Matrix mat,u32 exp_num,float *val) {
MATRIX temp;
int row, col;
u32 count = 0;
Create_Matrix(&temp, mat->row, mat->col); //建立缓存矩阵
Copy_Matrix(&temp, *mat); //将原矩阵复制到缓存矩阵中 目的传引用 源传指针
Delete_Matrix(mat); //删除原矩阵 重建添加exp_num行后的新矩阵
Create_Matrix(mat, temp.row, temp.col + exp_num);
for (row = 0;row < temp.row;row++) {
for (col = 0;col < temp.col;col++) { //转移原数据
mat->mem[row][col] = temp.mem[row][col];
}
for (;col < mat->col;col++) { //继续在当前行中向新加入列添加数据
mat->mem[row][col] = val[count++];
}
}
Delete_Matrix(&temp);
}
void Matrix_Remove_Column(Matrix mat, int col_index) {
MATRIX temp;
int row, col;
u32 count;
if (col_index > mat->col - 1) { //试图删除不存在的列
printf("err,matrix_remove_column\n");
return;
}
Create_Matrix(&temp, mat->row, mat->col);
Copy_Matrix(&temp, *mat);
Delete_Matrix(mat); //重构列数减少1的矩阵
Create_Matrix(mat, temp.row, temp.col - 1);
for (row = 0;row < temp.row;row++) { //转移原矩阵数据到新矩阵 注意跳过下标为col_index的列
count = 0;
for (col = 0;col < temp.col;col++) {
if (col == col_index) { //跳过要删除的列
continue;
}
mat->mem[row][count] = temp.mem[row][col]; //count控制原矩阵列标 配合跳过要删除的列
count++;
}
}
Delete_Matrix(&temp);
}
void Matrix_Remove_Row(Matrix mat, int row_index) {
MATRIX temp;
int row, col;
u32 count;
if (row_index > mat->row - 1) {
printf("err,matrix_remove_row\n");
return;
}
Create_Matrix(&temp, mat->row, mat->col);
Copy_Matrix(&temp, *mat);
Delete_Matrix(mat);
Create_Matrix(mat, temp.row - 1, temp.col);
for (col = 0;col < temp.col;col++) {
count = 0;
for (row = 0;row < temp.row;row++) {
if (row == row_index) {
continue;
}
mat->mem[count][col] = temp.mem[row][col];
count++;
}
}
Delete_Matrix(&temp);
}simplex.h
#ifndef SIMPLEX_H
#define SIMPLEX_H
/* simplex.h单纯形算法数据结构与操作头文件 */
#include"matrix.h"
typedef struct PIVOT { //基变量数据结构
int bvar; //base variant variable:yi
int nbvar; //non-base variant variable:xi
}PIVOT;
typedef enum STRATEGY { //LP=Linear Programming,ILP=Integer Linear Programming
LP = 0,
ILP = 1
}STRATEGY;
u8 initSimplexModel(MATRIX mat, MATRIX g_mat, char* var_name[]);
void deleteSimplexModel(void);
u8 SimplexRun(STRATEGY strategy);
int getMaxIntValue(void);
void getIntSolution(int* solution);
#endifsimplex.c
/* simplex.c单纯形算法操作实现 */
#include"simplex.h"
#define MAX_VAL_NUM 6144 //最大变量个数
#define MAX_VAL_NAME 8 //最大变量名个数
static MATRIX temp_mat;
static MATRIX goal_mat;
static char VarName[MAX_VAL_NUM][MAX_VAL_NAME];
static u32 VarName_Map[MAX_VAL_NUM] = { 0 };
static int BVarIff;
static float* coefbuff;
static u8 expand_flag;
static u8 using_name;
static int temp_z_col;
float accuracy = 0.01f;
#define eq(a,b) ((a-b)<accuracy&&(a-b)>-accuracy)
#define lt(a,b) ((b-a)>accuracy)
#define le(a,b) ((b-a)>accuracy||((b-a)>-accuracy&&(b-a)<accuracy))
#define isInt(a) (fabs((fabs(a)-(int)(fabs(a)+0.5)))<accuracy)
#define toInt(a) (a>0?(int)(a+0.5f):(int)(a-0.5f))
#define RESERVE_SPACE 3
#define SHOW_RESULT 1
#define RESERVE_SPACE 3
#define SHOW_RESULT 1
void showResult(MATRIX sf_mat, u8 goal) {
int row, col;
if (using_name) {
for (row = 0; row < sf_mat.row; row++) {
if (goal)
printf("\nU = ");
else
printf("\n%s = ", VarName[VarName_Map[row + BVarOff]]);
for (col = 0; col < sf_mat.col; col++) {
printf("%.2f%s ", sf_mat.mem[row][col], VarName[VarName_Map[col]]);
}
}
printf("\n");
} else {
for (row = 0; row < sf_mat.row; row++) {
if (goal)
printf("\nU = ");
for (col = 0; col < sf_mat.col; col++) {
printf("%.2f ", sf_mat.mem[row][col]);
}
}
printf("\n");
}
}
/************************************************************************
forall b_i>=0, return 0, otherwise: return 1
************************************************************************/
u8 should_expand(MATRIX mat) {
int row;
for (row = 0; row < mat.row; row++) {
/* the first column is b_i */
if (mat.mem[row][0] < 0)
return 1;
}
return 0;
}
u8 addNonBasicVarName(MATRIX sf_mat, char *name) {
if (sf_mat.col >= BVarOff) {
printf("err, non-basic var reserve space is not enough\n");
return 1;
}
if (using_name)
strcpy(VarName[sf_mat.col], name);
VarName_Map[sf_mat.col] = sf_mat.col;
return 0;
}
void resetSimplexModel(MATRIX *sf_mat) {
int i;
//expand_flag = 0;
if (should_expand(*sf_mat)) {
float *val;
if (!expand_flag) {
//not expand before, we need allocate name space for z
addNonBasicVarName(*sf_mat, "z");
} else {
//VarName_Map[temp_z_col] = sf_mat->col-1;
for (i = temp_z_col; i < sf_mat->col; i++) {
VarName_Map[i] = VarName_Map[i + 1];
}
VarName_Map[i] = sf_mat->col;
}
val = (float *)malloc(sf_mat->row * sizeof(float));
for (i = 0; i < sf_mat->row; i++)
val[i] = 1.0f; /* each row add a fresh variable z, for z>=0 */
matrix_expand_column(sf_mat, 1, val);
free(val);
expand_flag = 1;
} else {
expand_flag = 0;
}
free(coefbuff);
coefbuff = (float *)malloc(sf_mat->row * sizeof(float));
}
/************************************************************************
Set goal form, calculate the maximum value of goal form.
The last column of mat is constant
************************************************************************/
void setGoalForm(MATRIX mat) {
copy_matrix(&goal_mat, mat);
if (expand_flag) {
/* add -z for goal form */
float val = -1.0f;
//float val = 0.0f;
matrix_expand_column(&goal_mat, 1, &val);
}
}
/************************************************************************
mat: A * x_i <= b_i (x_i >=0)
the first column of matrix stores constant b_i
Slack Form: b_i - A * x_i >= 0
************************************************************************/
void createSlackForm(MATRIX *mat) {
int row, col;
for (row = 0; row < mat->row; row++)
for (col = 1; col < mat->col; col++)
mat->mem[row][col] = -mat->mem[row][col];
}
/************************************************************************
Find a non-basic variable, which has a positive coefficient
return: -1:doesn't have positive coefficient otherwise: index of coefficient
************************************************************************/
int findNextNonBasicVar(void) {
int i;
/* the first column is constant */
for (i = 1; i < goal_mat.col; i++) {
/* ignore z */
if (expand_flag && VarName_Map[i] == goal_mat.col - 1)
continue;
if (goal_mat.mem[0][i] > accuracy)
return i;
}
return -1;
}
int findNextNonBasicVarWithZ(MATRIX sf_mat, int row) {
int col;
/* we calculate the min(z) here, so find negative coefficient */
for (col = 1; col < sf_mat.col; col++) {
//TODO: need goal_mat.mem[0][col]>0?
//if( lt(sf_mat.mem[row][col], 0.0f) && lt(0.0f, goal_mat.mem[0][col]) ){
if (lt(sf_mat.mem[row][col], 0.0f)) {
return col;
}
}
return -1;
}
/************************************************************************
find most negative b_i to be pivot with z
************************************************************************/
PIVOT findMostNegativePivot(MATRIX sf_mat) {
int row;
float neg_b;
PIVOT pivot;
pivot.bvar = -1;
pivot.nbvar = sf_mat.col - 1; /* swap z and basic variable */
neg_b = -accuracy;
for (row = 0; row < sf_mat.row; row++) {
if (sf_mat.mem[row][0] < neg_b) {
neg_b = sf_mat.mem[row][0];
pivot.bvar = row;
}
}
return pivot;
}
PIVOT findPivot(MATRIX sf_mat, int nbvar) {
int row;
float tight_constrain = 100000000.0f;
float temp_constrain;
PIVOT pivot;
pivot.bvar = -1; /* -1 means doesn't find a valid pivot */
pivot.nbvar = nbvar;
for (row = 0; row < sf_mat.row; row++) {
if (eq(0.0f, sf_mat.mem[row][nbvar]) || sf_mat.mem[row][nbvar] > 0.0f)
continue;
temp_constrain = sf_mat.mem[row][0] / -sf_mat.mem[row][nbvar];
if (temp_constrain < tight_constrain) {
tight_constrain = temp_constrain;
pivot.bvar = row;
}
}
return pivot;
}
void swapNameSpace(PIVOT pivot) {
int map_index;
map_index = VarName_Map[pivot.nbvar];
VarName_Map[pivot.nbvar] = VarName_Map[pivot.bvar + BVarOff];
VarName_Map[pivot.bvar + BVarOff] = map_index;
}
/************************************************************************
swap basic var and non-basic var
************************************************************************/
void swapPivot(MATRIX *sf_mat, PIVOT pivot) {
int col;
float temp;
temp = sf_mat->mem[pivot.bvar][pivot.nbvar];
for (col = 0; col < sf_mat->col; col++) {
if (col == pivot.nbvar)
sf_mat->mem[pivot.bvar][col] = 1.0f / temp;
else
sf_mat->mem[pivot.bvar][col] /= -temp;
}
}
void replaceNewBasicVar(MATRIX *sf_mat, PIVOT pivot) {
int row, col;
for (row = 0; row < sf_mat->row; row++) {
if (row == pivot.bvar)
continue;
coefbuff[row] = sf_mat->mem[row][pivot.nbvar];
for (col = 0; col < sf_mat->col; col++) {
if (col == pivot.nbvar)
sf_mat->mem[row][col] = coefbuff[row] * sf_mat->mem[pivot.bvar][col];
else
sf_mat->mem[row][col] += coefbuff[row] * sf_mat->mem[pivot.bvar][col];
}
}
}
void updateGoalForm(MATRIX *gf_mat, MATRIX *sf_mat, PIVOT pivot) {
int col;
float temp;
temp = gf_mat->mem[0][pivot.nbvar];
for (col = 0; col < gf_mat->col; col++) {
if (col == pivot.nbvar)
gf_mat->mem[0][col] = temp * sf_mat->mem[pivot.bvar][col];
else
gf_mat->mem[0][col] += temp * sf_mat->mem[pivot.bvar][col];
}
}
/************************************************************************
swap pivot and reformulate slack form
************************************************************************/
void reformulation(MATRIX *sf_mat, PIVOT pivot) {
/* step1: swap basic var and non-basic var */
swapNameSpace(pivot);
swapPivot(sf_mat, pivot);
/* step2: replace new basic var with non-basic var */
replaceNewBasicVar(sf_mat, pivot);
/* step3: update goal form */
updateGoalForm(&goal_mat, sf_mat, pivot);
}
void dispSolution(MATRIX sf_mat, u8 show_res) {
int row, col;
if (show_res) {
showResult(goal_mat, 1);
showResult(temp_mat, 0);
printf("\nSolution:\n");
}
for (col = 1; col < sf_mat.col; col++) {
float solution = 0.0f;
for (row = 0; row < sf_mat.row; row++) {
if (VarName_Map[row + BVarOff] == col) {
solution = sf_mat.mem[row][0];
}
}
if (show_res) {
if (using_name)
printf("%s=%.2f, ", VarName[col], solution);
else
printf("%.2f, ", solution);
}
}
if (show_res)
printf("U=%.2f\n", goal_mat.mem[0][0]);
}
void dispIntSolution(MATRIX sf_mat, u8 show_res) {
int row, col;
if (show_res) {
showResult(goal_mat, 1);
showResult(temp_mat, 0);
printf("\nInterger Solution:\n");
}
for (col = 1; col < temp_mat.col - expand_flag; col++) {
int sol = 0;
for (row = 0; row < temp_mat.row; row++) {
if (VarName_Map[row + BVarOff] == col) {
sol = toInt(temp_mat.mem[row][0]);
}
}
if (show_res) {
if (using_name)
printf("%s=%d, ", VarName[col], sol);
else
printf("%d, ", sol);
}
}
if (show_res)
printf("U=%.2f\n", goal_mat.mem[0][0]);
}
int getNonIntIndex(MATRIX sf_mat, int row_index) {
int row, col;
if (row_index >= sf_mat.row) {
return -1;
}
for (row = (int)row_index; row < sf_mat.row; row++) {
if (!isInt(sf_mat.mem[row][0])) {
for (col = 1; col < sf_mat.col; col++) {
if (!isInt(sf_mat.mem[row][col]))
return row; /* find a basic var which has non-interger bi and xi */
}
}
}
return -100;
}
/* add gomory constraint to calculate interger solution */
void addGomoryConstraint(MATRIX *s_mat, int row_index) {
static int cons_cnt = 1;
float *gomory_cons;
int col;
gomory_cons = (float *)malloc(s_mat->col * sizeof(float));
/* extract basic var fractional part, with b>=0 */
gomory_cons[0] = -(s_mat->mem[row_index][0] - (int)s_mat->mem[row_index][0]);
/* extract non-basic var fractional part */
for (col = 1; col < s_mat->col; col++) {
if (eq(s_mat->mem[row_index][col], 0.0f) || isInt(s_mat->mem[row_index][col])) {
/* no fraction part */
gomory_cons[col] = 0.0f;
continue;
}
gomory_cons[col] = -(s_mat->mem[row_index][col] - (float)ceil(s_mat->mem[row_index][col]));
}
/* add gomory constraint */
matrix_expand_row(s_mat, 1, gomory_cons);
if (using_name)
sprintf(VarName[s_mat->row - 1 + BVarOff], "g%d", cons_cnt++);
VarName_Map[s_mat->row - 1 + BVarOff] = s_mat->row - 1 + BVarOff;
free(gomory_cons);
}
/* remove z column */
int removeZ(MATRIX *s_mat) {
int z_col = -1;
if (!expand_flag)
return -1;
for (z_col = 0; z_col < s_mat->col; z_col++) {
if (VarName_Map[z_col] == s_mat->col - 1) {
break;
}
}
if (z_col >= 0) {
matrix_remove_column(s_mat, (int)z_col);
matrix_remove_column(&goal_mat, (int)z_col);
}
return z_col;
}
u8 solveSimplex(void) {
u8 res = 0;
int next_nbvar;
PIVOT pivot;
/* we should first calculate the min(z), if min(z)=0, then change z to non-basic var */
if (expand_flag) {
int row_z;
pivot = findMostNegativePivot(temp_mat);
row_z = (int)pivot.bvar;
if (pivot.bvar == -1) {
//printf("NA, findMostNegativePivot\n");
return 0;
}
reformulation(&temp_mat, pivot);
while (1) {
if (eq(temp_mat.mem[row_z][0], 0.0f)) {
/* min(z)=0 */
int col;
u8 res = 0;
for (col = 1; col < temp_mat.col; col++) {
if (!eq(temp_mat.mem[row_z][col], 0.0f)) {
pivot.bvar = row_z;
pivot.nbvar = col;
reformulation(&temp_mat, pivot);
res = 1;
break;
}
}
if (res)
break;
else {
printf("some err here\n");
while (1);
}
}
next_nbvar = findNextNonBasicVarWithZ(temp_mat, row_z);
if (next_nbvar == -1) {
//printf("NA, findNextNonBasicVarForZ\n");
//showResult(goal_mat, 1);
//showResult(temp_mat, 0);
return 0;
}
pivot = findPivot(temp_mat, (int)next_nbvar);
reformulation(&temp_mat, pivot);
if (pivot.bvar == row_z) {
//TODO: is it correct?
/* z becomes non-basic variable now, we can continue */
break;
}
}
}
while (1) {
next_nbvar = findNextNonBasicVar();
if (next_nbvar < 0) {
/* non positive coefficient, we get the maximum value */
res = 1;
break;
}
pivot = findPivot(temp_mat, (int)next_nbvar);
if (pivot.bvar == -1) {
/* goal formula can be infinite, so doesn't have maximum value */
//printf("NA, inf result\n");
res = 0;
break;
} else {
next_nbvar = 1;
}
reformulation(&temp_mat, pivot);
}
return res;
}
u8 incise(void) {
int nonIntIndex = -1;
u8 res;
while (1) {
//nonIntIndex = getNonIntIndex(temp_mat, nonIntIndex+1);
nonIntIndex = getNonIntIndex(temp_mat, 0);
/* Handle ILP */
if (nonIntIndex >= 0) {
temp_z_col = removeZ(&temp_mat);
addGomoryConstraint(&temp_mat, (int)nonIntIndex);
resetSimplexModel(&temp_mat);
setGoalForm(goal_mat);
res = solveSimplex();
if (!res) //NA
return res;
} else if (nonIntIndex == -1) {
//TODO: is it possible for this situation?
/* used up all gomory constraints and can't find interger solution */
//printf("NA, can't find interger solution\n");
return 0;
} else {
/* Get interger soluiton */
return 1;
}
}
}
int getMaxIntValue(void) {
return toInt(goal_mat.mem[0][0]);
}
void getIntSolution(int *solution) {
int row, col;
for (col = 1; col < temp_mat.col - expand_flag; col++) {
float sol = 0.0f;
for (row = 0; row < temp_mat.row; row++) {
if (VarName_Map[row + BVarOff] == col) {
sol = temp_mat.mem[row][0];
}
}
solution[col - 1] = toInt(sol);
}
}
u8 initSimplexModel(MATRIX mat, MATRIX g_mat, char *var_name[]) {
u8 res = 0;
int i;
if (var_name == NULL)
using_name = 0;
else
using_name = 1;
expand_flag = 0;
res |= create_matrix(&goal_mat, 1, mat.col);
/* we will do calculation on temp_mat later */
res |= create_matrix(&temp_mat, mat.row, mat.col);
copy_matrix(&temp_mat, mat);
if (should_expand(temp_mat)) {
float *val;
int i;
expand_flag = 1;
val = (float *)malloc(temp_mat.row * sizeof(float));
for (i = 0; i < temp_mat.row; i++)
val[i] = -1.0f; /* each row add a fresh variable z, for z>=0 */
matrix_expand_column(&temp_mat, 1, val);
free(val);
}
coefbuff = (float *)malloc(mat.row * sizeof(float));
for (i = 0; i < mat.col; i++) {
if (using_name)
strcpy(VarName[i], var_name[i]);
VarName_Map[i] = i;
}
if (expand_flag) {
if (using_name)
strcpy(VarName[mat.col], "z");
VarName_Map[mat.col] = mat.col;
BVarOff = mat.col + RESERVE_SPACE;
} else {
BVarOff = mat.col + RESERVE_SPACE; /* basic value offset of VarName array */
}
for (i = 0; i < mat.row; i++) {
if (using_name)
sprintf(VarName[i + BVarOff], "y%d", i + 1);
VarName_Map[i + BVarOff] = i + BVarOff;
}
setGoalForm(g_mat);
createSlackForm(&temp_mat);
return res;
}
void deleteSimplexModel(void) {
delete_matrix(&goal_mat);
delete_matrix(&temp_mat);
free(coefbuff);
}
/***************************************************************************
Input:
c_mat: constraint matrix
g_mat: goal matrix
var_name: variable name
strategy:
LP: Linear Program
ILP: Interger Linear Program
Return:
0: unsatisfy otherwise: satisfy
***************************************************************************/
u8 SimplexRun(STRATEGY strategy) {
u8 res = 0;
res = solveSimplex();
if (res) {
if (strategy == LP) {
dispSolution(temp_mat, SHOW_RESULT);
} else {
res = incise();
dispIntSolution(temp_mat, SHOW_RESULT);
}
}
return res;
}
main.c
/* main.c */
#include "matrix.h"
#include "simplex.h"
MATRIX mat;
MATRIX goal_mat;
void Test1(STRATEGY strategy) {
char* var_name[] = { "","x1","x2", "x3", "x4" };
// x1 + + 2x3 <= 18
// + 2x2 - 7x4 <= 0
// x1 + x2 + x3 + x4 <= 9 [ x1+x2=b <=> (x1+x2>=b && x1+x2<=b) ]
// - x1 - x2 - x3 - x4 <= -9
// -x2 + x3 - 2x4 <= -1
float val[] =
{
18, 1, 0, 2, 0,
0, 0, 2, 0, -7,
9, 1, 1, 1, 1,
-9, -1, -1, -1, -1,
-1, 0,-1, 1, -2,
};
// maximize U = x1 + x2 + 3x3 - x4
float goal[] = { 0, 1, 1, 3, -1 };
int max;
int solution[4];
int i;
create_matrix(&mat, 5, 5);
set_matrix(&mat, val);
create_matrix(&goal_mat, 1, 5);
set_matrix(&goal_mat, goal);
initSimplexModel(mat, goal_mat, var_name);
SimplexRun(strategy);
max = getMaxIntValue();
getIntSolution(solution);
deleteSimplexModel();
delete_matrix(&mat);
delete_matrix(&goal_mat);
}
void Test2(STRATEGY strategy) {
u8 i;
char* var_name[] = { "", "x1", "x2" };
// 9x1 + 7x2 <= 56
// 7x1 + 20x2 <= 70
float val[] =
{
56, 9, 7,
70, 7, 20,
};
// maximize U = 40x1 + 90x2
float goal[] = { 0, 40, 90 };
int max;
int solution[2];
create_matrix(&mat, 2, 3);
set_matrix(&mat, val);
create_matrix(&goal_mat, 1, 3);
set_matrix(&goal_mat, goal);
initSimplexModel(mat, goal_mat, var_name);
SimplexRun(strategy);
max = getMaxIntValue();
getIntSolution(solution);
deleteSimplexModel();
delete_matrix(&mat);
delete_matrix(&goal_mat);
}
void initSolver(void);
void solverTest(void);
int main() {
Test1(LP);
Test2(ILP);
printf("\nPress any key to exit");
getchar();
return 0;
}















 3046
3046











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









