






一、内核开启CAN
CAN 设置
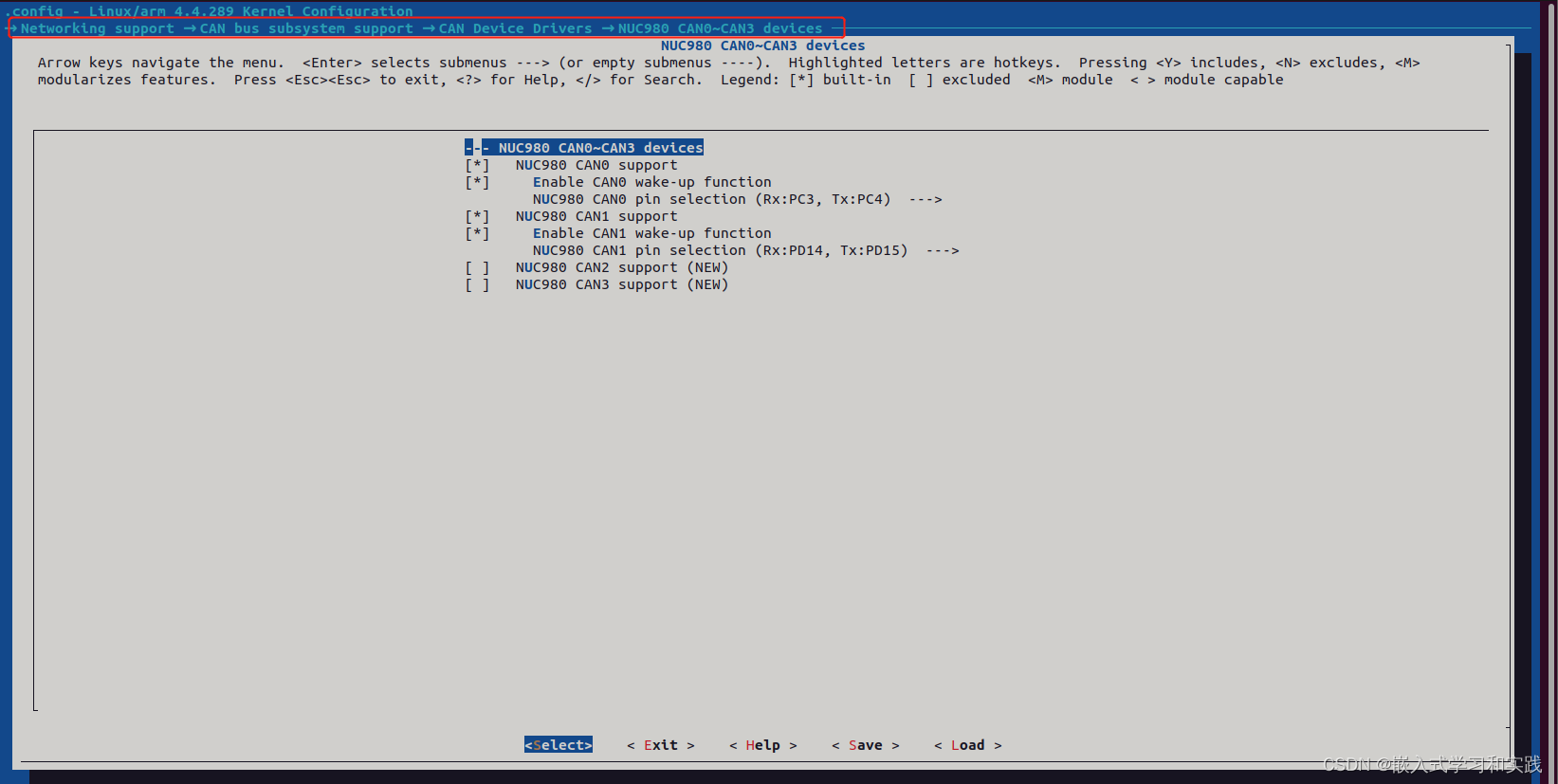
NUC980 系列带有2个CAN(Controller Area Network), 可以分别独立设置。 请按以下的说明来使能CAN功能. 每个CAN可以单独的开关. CAN0有多组管脚可以选择, 需要一并设置。
使用者也可以设置CAN的唤醒功能。步骤如下:
进入 NUC980-linux-4.4.y-master
打开终端,输入
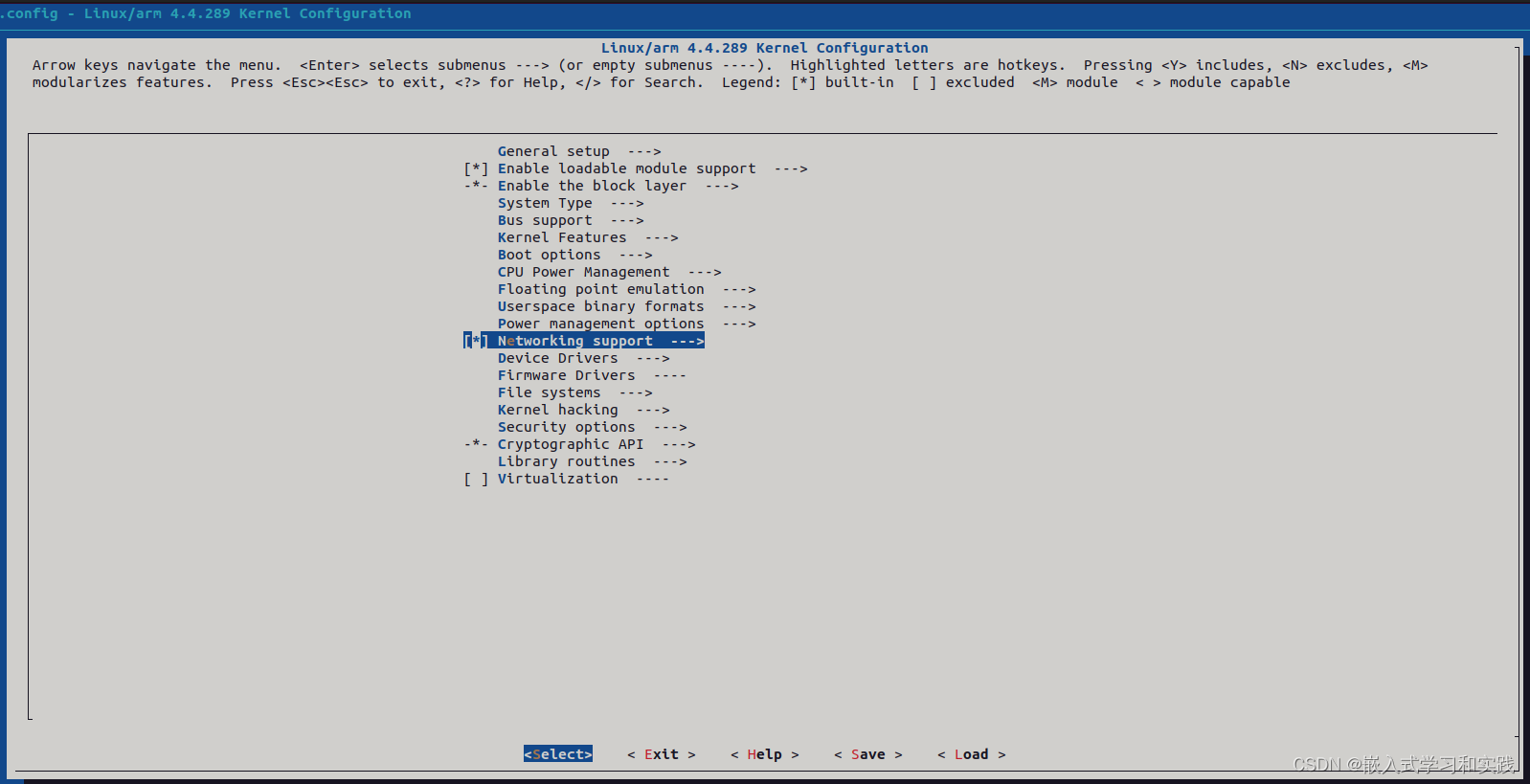
make menuconfig
选择 Networking support
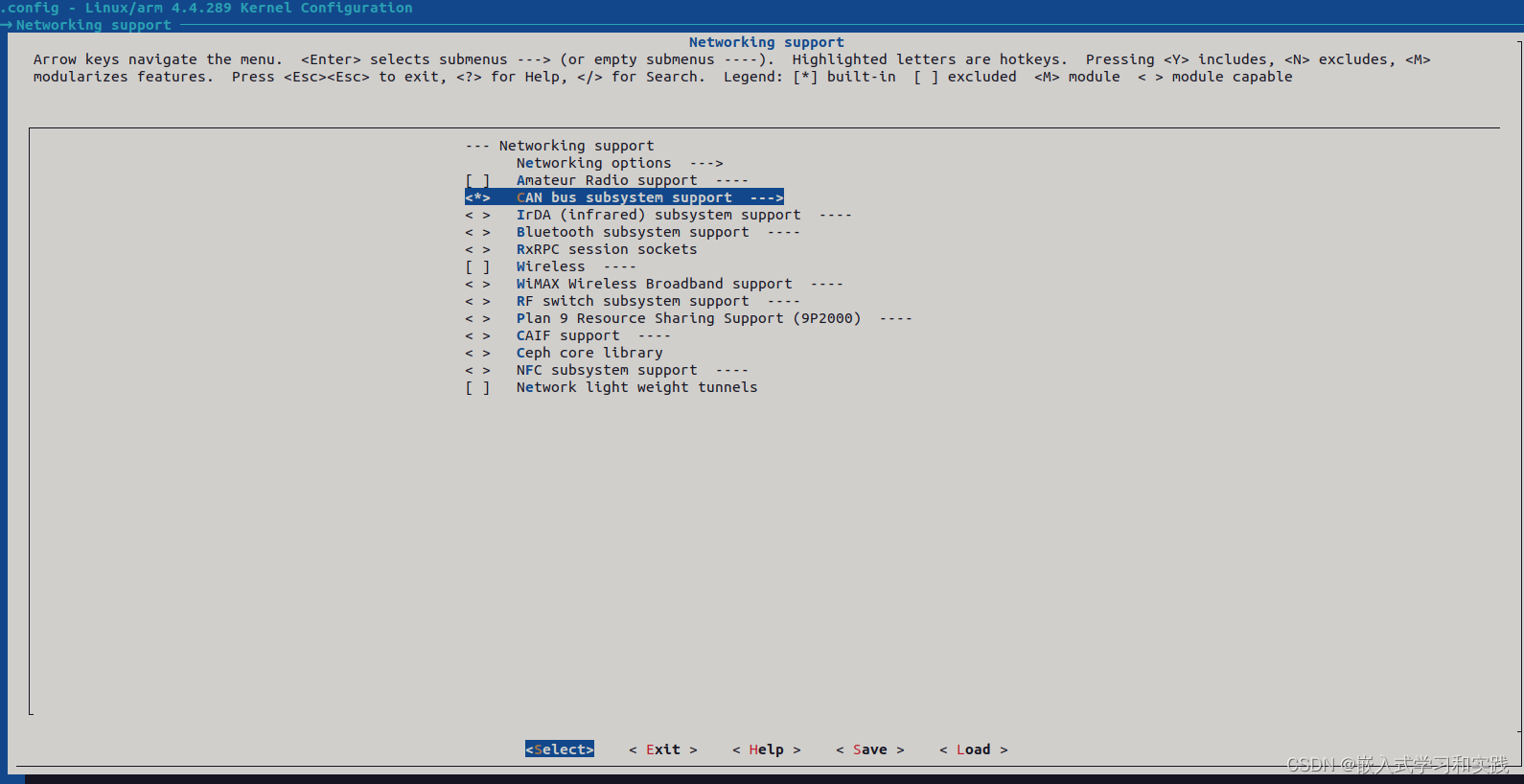
选择 CAN bus subsystem support
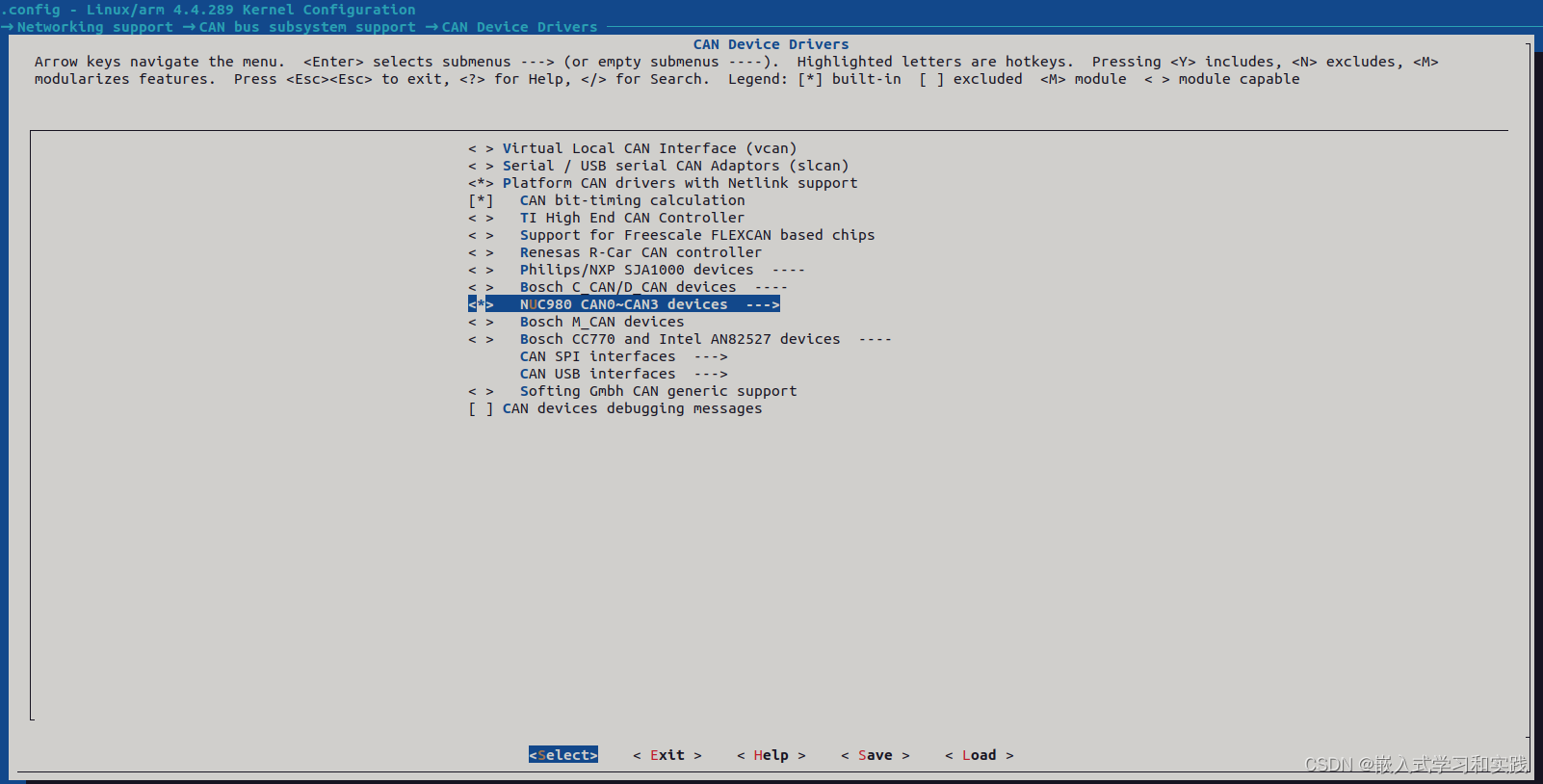
选择 CAN Device Drivers
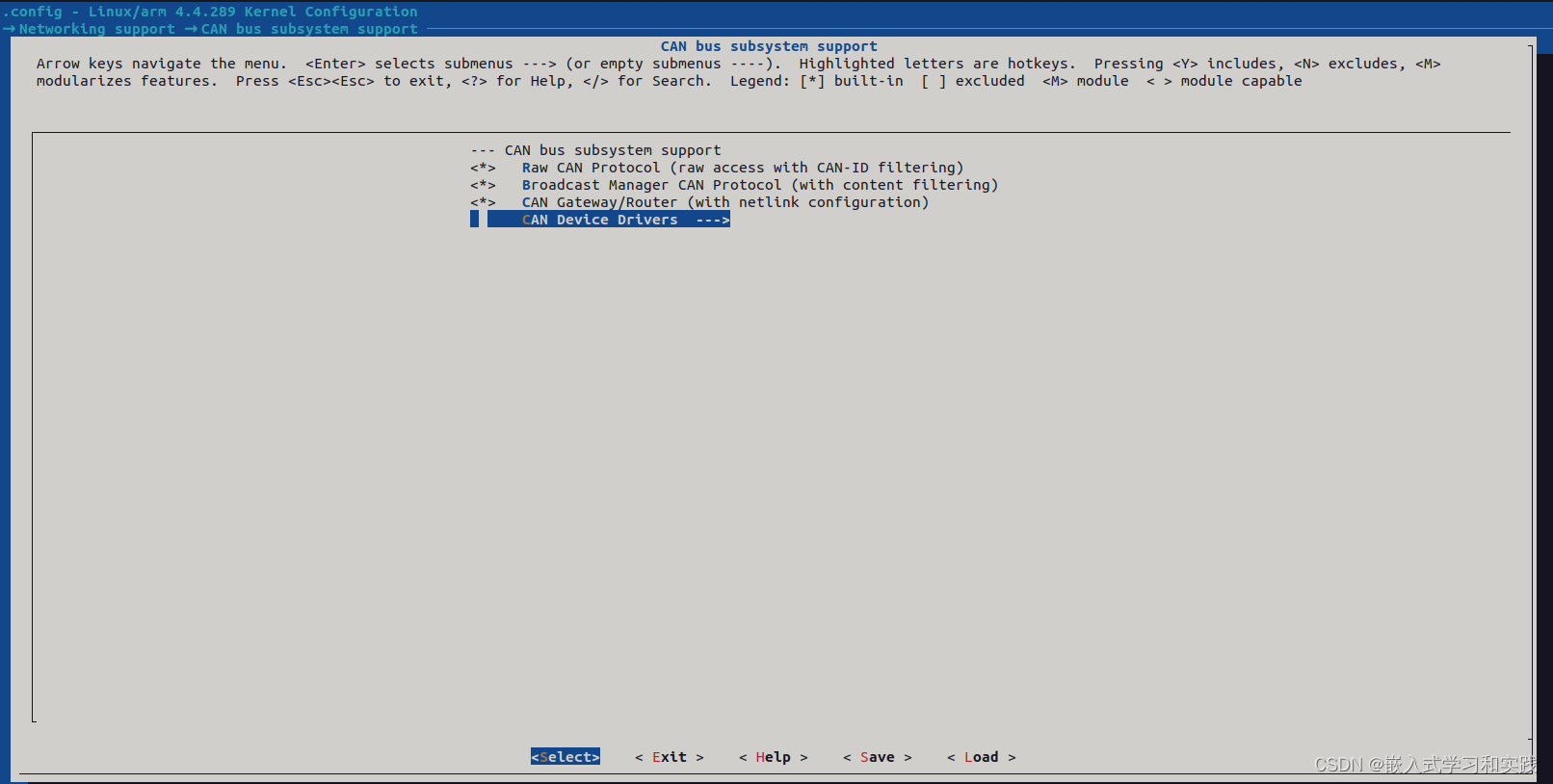
选择 NUC980 CAN0~CAN3 devices
根据电路选择对应的引脚
保存,退出。
重新编译镜像,下载到开发板即可。
注意:
内核配置中,查看使用的CAN引脚是否和其它功能比如串口有冲突,有的话需要取消未使用的功能配置。
电路设计,使用 CAN芯片 SN65HVD230 (SN65HVD23x 3.3V CAN 总线收发器)。
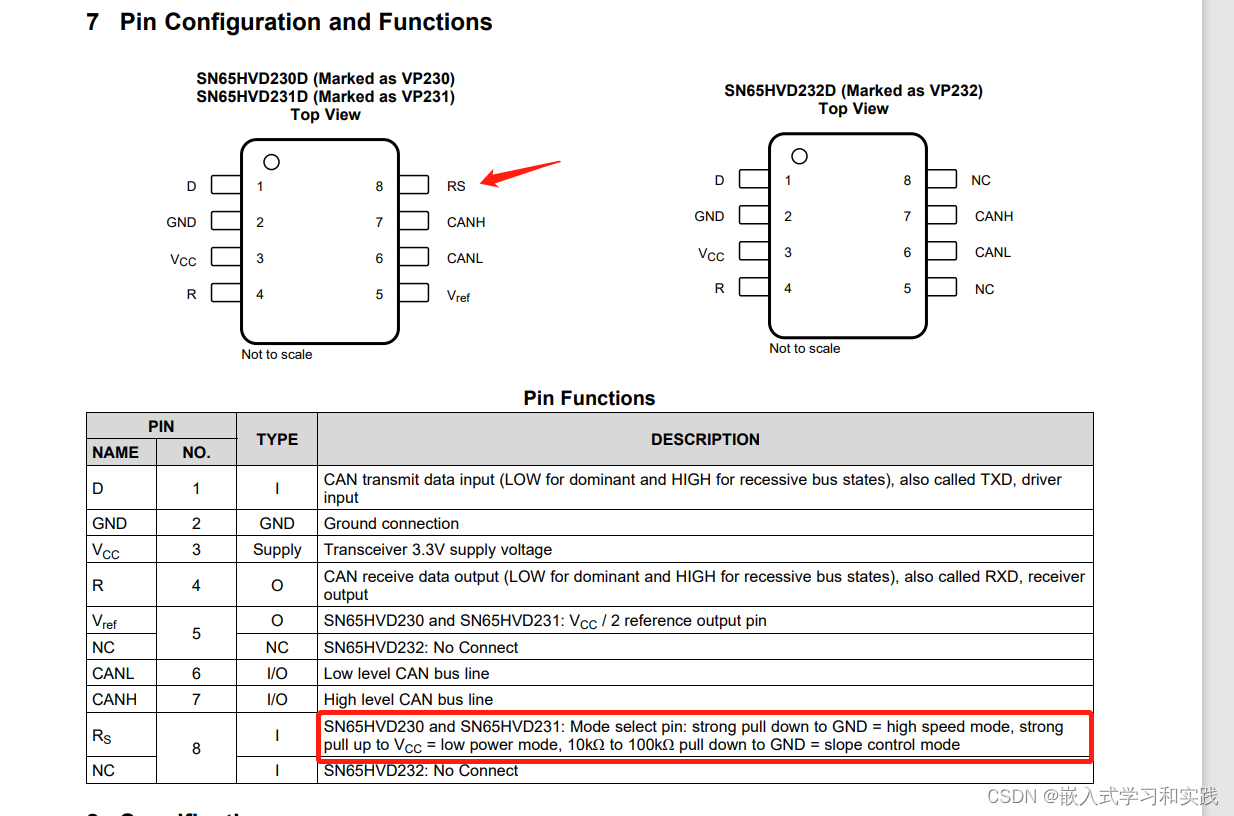
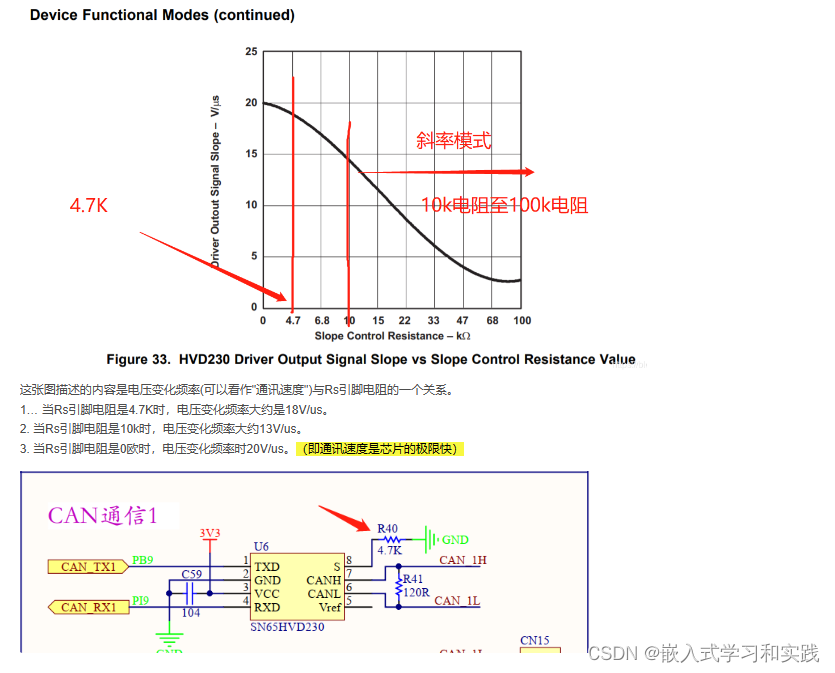
需要注意RS引脚,该引脚是模式配置。
二、测试代码
指令查看
ifconfig -a
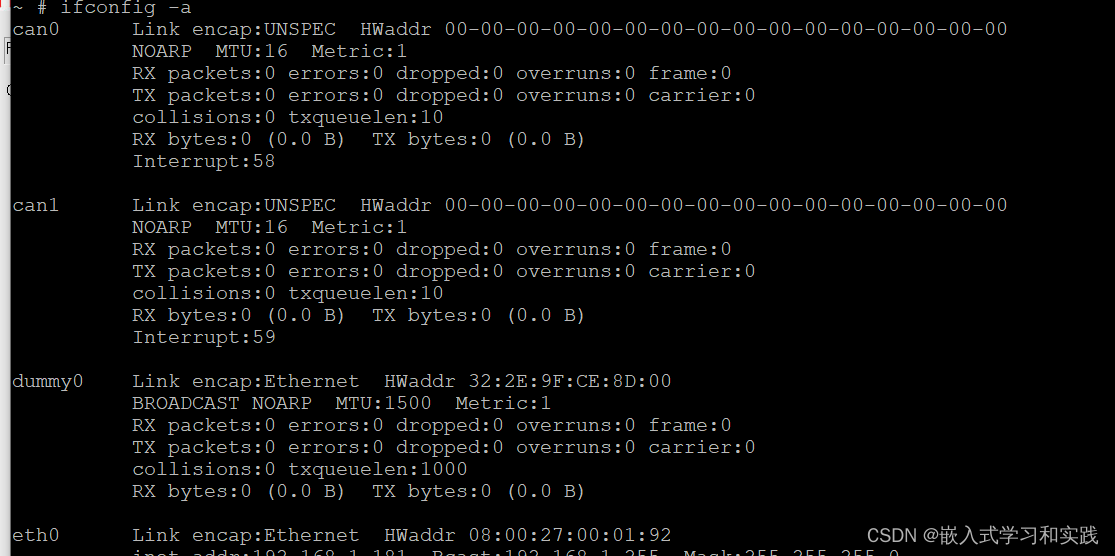
或者
ls /sys/class/net

官方测试代码
/*
* Copyright (c) 2014 Nuvoton technology corporation
* All rights reserved.
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
*/
/* libsocketcan.c
*
* (C) 2009 Luotao Fu <l.fu@pengutronix.de>
*
* This library is free software; you can redistribute it and/or modify it under
* the terms of the GNU Lesser General Public License as published by the Free
* Software Foundation; either version 2.1 of the License, or (at your option)
* any later version.
*
* This library is distributed in the hope that it will be useful, but WITHOUT
* ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS
* FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more
* details.
*
* You should have received a copy of the GNU Lesser General Public License
* along with this library; if not, write to the Free Software Foundation, Inc.,
* 59 Temple Place, Suite 330, Boston, MA 02111-1307 USA
*/
#include <getopt.h>
#include <libgen.h>
#include <signal.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <limits.h>
#include <errno.h>
#include <poll.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <sys/types.h>
#include <sys/uio.h>
#include <linux/types.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <linux/rtnetlink.h>
#include <linux/netlink.h>
/*
* CAN bit-timing parameters
*/
struct can_bittiming {
__u32 bitrate; /* Bit-rate in bits/second */
__u32 sample_point; /* Sample point in one-tenth of a percent */
__u32 tq; /* Time quanta (TQ) in nanoseconds */
__u32 prop_seg; /* Propagation segment in TQs */
__u32 phase_seg1; /* Phase buffer segment 1 in TQs */
__u32 phase_seg2; /* Phase buffer segment 2 in TQs */
__u32 sjw; /* Synchronisation jump width in TQs */
__u32 brp; /* Bit-rate prescaler */
};
/*
* CAN harware-dependent bit-timing constant
*/
struct can_bittiming_const {
char name[16]; /* Name of the CAN controller hardware */
__u32 tseg1_min; /* Time segement 1 = prop_seg + phase_seg1 */
__u32 tseg1_max;
__u32 tseg2_min; /* Time segement 2 = phase_seg2 */
__u32 tseg2_max;
__u32 sjw_max; /* Synchronisation jump width */
__u32 brp_min; /* Bit-rate prescaler */
__u32 brp_max;
__u32 brp_inc;
};
/*
* CAN clock parameters
*/
struct can_clock {
__u32 freq; /* CAN system clock frequency in Hz */
};
/*
* CAN operational and error states
*/
enum can_state {
CAN_STATE_ERROR_ACTIVE = 0, /* RX/TX error count < 96 */
CAN_STATE_ERROR_WARNING, /* RX/TX error count < 128 */
CAN_STATE_ERROR_PASSIVE, /* RX/TX error count < 256 */
CAN_STATE_BUS_OFF, /* RX/TX error count >= 256 */
CAN_STATE_STOPPED, /* Device is stopped */
CAN_STATE_SLEEPING, /* Device is sleeping */
CAN_STATE_MAX
};
/*
* CAN bus error counters
*/
struct can_berr_counter {
__u16 txerr;
__u16 rxerr;
};
/*
* CAN controller mode
*/
struct can_ctrlmode {
__u32 mask;
__u32 flags;
};
#define CAN_CTRLMODE_LOOPBACK 0x01 /* Loopback mode */
#define CAN_CTRLMODE_LISTENONLY 0x02 /* Listen-only mode */
#define CAN_CTRLMODE_3_SAMPLES 0x04 /* Triple sampling mode */
#define CAN_CTRLMODE_ONE_SHOT 0x08 /* One-Shot mode */
#define CAN_CTRLMODE_BERR_REPORTING 0x10 /* Bus-error reporting */
/*
* CAN device statistics
*/
struct can_device_stats {
__u32 bus_error; /* Bus errors */
__u32 error_warning; /* Changes to error warning state */
__u32 error_passive; /* Changes to error passive state */
__u32 bus_off; /* Changes to bus off state */
__u32 arbitration_lost; /* Arbitration lost errors */
__u32 restarts; /* CAN controller re-starts */
};
/*
* CAN netlink interface
*/
enum {
IFLA_CAN_UNSPEC,
IFLA_CAN_BITTIMING,
IFLA_CAN_BITTIMING_CONST,
IFLA_CAN_CLOCK,
IFLA_CAN_STATE,
IFLA_CAN_CTRLMODE,
IFLA_CAN_RESTART_MS,
IFLA_CAN_RESTART,
IFLA_CAN_BERR_COUNTER,
__IFLA_CAN_MAX
};
#define parse_rtattr_nested(tb, max, rta) \
(parse_rtattr((tb), (max), RTA_DATA(rta), RTA_PAYLOAD(rta)))
#define NLMSG_TAIL(nmsg) \
((struct rtattr *) (((void *) (nmsg)) + NLMSG_ALIGN((nmsg)->nlmsg_len)))
#define IFLA_CAN_MAX (__IFLA_CAN_MAX - 1)
#define IF_UP 1
#define IF_DOWN 2
#define GET_STATE 1
#define GET_RESTART_MS 2
#define GET_BITTIMING 3
#define GET_CTRLMODE 4
#define GET_CLOCK 5
#define GET_BITTIMING_CONST 6
#define GET_BERR_COUNTER 7
#define GET_XSTATS 8
struct get_req {
struct nlmsghdr n;
struct rtgenmsg g;
};
struct set_req {
struct nlmsghdr n;
struct ifinfomsg i;
char buf[1024];
};
struct req_info {
__u8 restart;
__u8 disable_autorestart;
__u32 restart_ms;
struct can_ctrlmode *ctrlmode;
struct can_bittiming *bittiming;
};
#define PF_CAN 29
#define SIOCGIFINDEX 0x8933 /* name -> if_index mapping */
#define SIOCGIFFLAGS 0x8913 /* get flags */
/* Standard well-defined IP protocols. */
enum
{
IPPROTO_IP = 0, /* Dummy protocol for TCP */
IPPROTO_ICMP = 1, /* Internet Control Message Protocol */
IPPROTO_IGMP = 2, /* Internet Group Management Protocol */
IPPROTO_IPIP = 4, /* IPIP tunnels (older KA9Q tunnels use 94) */
IPPROTO_TCP = 6, /* Transmission Control Protocol */
IPPROTO_EGP = 8, /* Exterior Gateway Protocol */
IPPROTO_PUP = 12, /* PUP protocol */
IPPROTO_UDP = 17, /* User Datagram Protocol */
IPPROTO_IDP = 22, /* XNS IDP protocol */
IPPROTO_DCCP = 33, /* Datagram Congestion Control Protocol */
IPPROTO_RSVP = 46, /* RSVP protocol */
IPPROTO_GRE = 47, /* Cisco GRE tunnels (rfc 1701,1702) */
IPPROTO_IPV6 = 41, /* IPv6-in-IPv4 tunnelling */
IPPROTO_ESP = 50, /* Encapsulation Security Payload protocol */
IPPROTO_AH = 51, /* Authentication Header protocol */
IPPROTO_BEETPH = 94, /* IP option pseudo header for BEET */
IPPROTO_PIM = 103, /* Protocol Independent Multicast */
IPPROTO_COMP = 108, /* Compression Header protocol */
IPPROTO_SCTP = 132, /* Stream Control Transport Protocol */
IPPROTO_UDPLITE = 136, /* UDP-Lite (RFC 3828) */
IPPROTO_RAW = 255, /* Raw IP packets */
IPPROTO_MAX
};
/* particular protocols of the protocol family PF_CAN */
#define CAN_RAW 1 /* RAW sockets */
#define CAN_BCM 2 /* Broadcast Manager */
#define CAN_TP16 3 /* VAG Transport Protocol v1.6 */
#define CAN_TP20 4 /* VAG Transport Protocol v2.0 */
#define CAN_MCNET 5 /* Bosch MCNet */
#define CAN_ISOTP 6 /* ISO 15765-2 Transport Protocol */
#define CAN_NPROTO 7
static void
parse_rtattr(struct rtattr **tb, int max, struct rtattr *rta, int len)
{
memset(tb, 0, sizeof(*tb) * max);
while (RTA_OK(rta, len)) {
if (rta->rta_type <= max) {
tb[rta->rta_type] = rta;
}
rta = RTA_NEXT(rta, len);
}
}
static int addattr32(struct nlmsghdr *n, size_t maxlen, int type, __u32 data)
{
int len = RTA_LENGTH(4);
struct rtattr *rta;
if (NLMSG_ALIGN(n->nlmsg_len) + len > maxlen) {
fprintf(stderr,
"addattr32: Error! max allowed bound %zu exceeded\n",
maxlen);
return -1;
}
rta = NLMSG_TAIL(n);
rta->rta_type = type;
rta->rta_len = len;
memcpy(RTA_DATA(rta), &data, 4);
n->nlmsg_len = NLMSG_ALIGN(n->nlmsg_len) + len;
return 0;
}
static int addattr_l(struct nlmsghdr *n, size_t maxlen, int type,
const void *data, int alen)
{
int len = RTA_LENGTH(alen);
struct rtattr *rta;
if (NLMSG_ALIGN(n->nlmsg_len) + RTA_ALIGN(len) > maxlen) {
fprintf(stderr,
"addattr_l ERROR: message exceeded bound of %zu\n",
maxlen);
return -1;
}
rta = NLMSG_TAIL(n);
rta->rta_type = type;
rta->rta_len = len;
memcpy(RTA_DATA(rta), data, alen);
n->nlmsg_len = NLMSG_ALIGN(n->nlmsg_len) + RTA_ALIGN(len);
return 0;
}
/**
* @ingroup intern
* @brief send_mod_request - send a linkinfo modification request
*
* @param fd decriptor to a priorly opened netlink socket
* @param n netlink message containing the request
*
* sends a request to setup the the linkinfo to netlink layer and awaits the
* status.
*
* @return 0 if success
* @return negativ if failed
*/
static int send_mod_request(int fd, struct nlmsghdr *n)
{
int status;
struct sockaddr_nl nladdr;
struct nlmsghdr *h;
struct iovec iov = {
.iov_base = (void *)n,
.iov_len = n->nlmsg_len
};
struct msghdr msg = {
.msg_name = &nladdr,
.msg_namelen = sizeof(nladdr),
.msg_iov = &iov,
.msg_iovlen = 1,
};
char buf[16384];
memset(&nladdr, 0, sizeof(nladdr));
nladdr.nl_family = AF_NETLINK;
nladdr.nl_pid = 0;
nladdr.nl_groups = 0;
n->nlmsg_seq = 0;
n->nlmsg_flags |= NLM_F_ACK;
status = sendmsg(fd, &msg, 0);
if (status < 0) {
perror("Cannot talk to rtnetlink");
return -1;
}
iov.iov_base = buf;
while (1) {
iov.iov_len = sizeof(buf);
status = recvmsg(fd, &msg, 0);
for (h = (struct nlmsghdr *)buf; (size_t) status >= sizeof(*h);) {
int len = h->nlmsg_len;
int l = len - sizeof(*h);
if (l < 0 || len > status) {
if (msg.msg_flags & MSG_TRUNC) {
fprintf(stderr, "Truncated message\n");
return -1;
}
printf("!!!malformed message: len=%d\n", len);
return -1;
}
if (h->nlmsg_type == NLMSG_ERROR) {
struct nlmsgerr *err =
(struct nlmsgerr *)NLMSG_DATA(h);
if ((size_t) l < sizeof(struct nlmsgerr)) {
fprintf(stderr, "ERROR truncated\n");
} else {
errno = -err->error;
if (errno == 0)
return 0;
perror("RTNETLINK answers");
}
return -1;
}
status -= NLMSG_ALIGN(len);
h = (struct nlmsghdr *)((char *)h + NLMSG_ALIGN(len));
}
}
return 0;
}
/**
* @ingroup intern
* @brief send_dump_request - send a dump linkinfo request
*
* @param fd decriptor to a priorly opened netlink socket
* @param family rt_gen message family
* @param type netlink message header type
*
* @return 0 if success
* @return negativ if failed
*/
static int send_dump_request(int fd, int family, int type)
{
struct get_req req;
memset(&req, 0, sizeof(req));
req.n.nlmsg_len = sizeof(req);
req.n.nlmsg_type = type;
req.n.nlmsg_flags = NLM_F_REQUEST | NLM_F_ROOT | NLM_F_MATCH;
req.n.nlmsg_pid = 0;
req.n.nlmsg_seq = 0;
req.g.rtgen_family = family;
return send(fd, (void *)&req, sizeof(req), 0);
}
//extern int optind, opterr, optopt;
/**
* @ingroup intern
* @brief open_nl_sock - open a netlink socket
*
* opens a netlink socket and returns the socket descriptor
*
* @return 0 if success
* @return negativ if failed
*/
static int open_nl_sock()
{
int fd;
int sndbuf = 32768;
int rcvbuf = 32768;
unsigned int addr_len;
struct sockaddr_nl local;
fd = socket(AF_NETLINK, SOCK_RAW, NETLINK_ROUTE);
if (fd < 0) {
printf("Cannot open netlink socket");
return -1;
}
setsockopt(fd, SOL_SOCKET, SO_SNDBUF, (void *)&sndbuf, sizeof(sndbuf));
setsockopt(fd, SOL_SOCKET, SO_RCVBUF, (void *)&rcvbuf, sizeof(rcvbuf));
memset(&local, 0, sizeof(local));
local.nl_family = AF_NETLINK;
local.nl_groups = 0;
if (bind(fd, (struct sockaddr *)&local, sizeof(local)) < 0) {
printf("Cannot bind netlink socket");
return -1;
}
addr_len = sizeof(local);
if (getsockname(fd, (struct sockaddr *)&local, &addr_len) < 0) {
printf("Cannot getsockname");
return -1;
}
if (addr_len != sizeof(local)) {
printf("Wrong address length %u\n", addr_len);
return -1;
}
if (local.nl_family != AF_NETLINK) {
printf("Wrong address family %d\n", local.nl_family);
return -1;
}
return fd;
}
/**
* @ingroup intern
* @brief do_get_nl_link - get linkinfo
*
* @param fd socket file descriptor to a priorly opened netlink socket
* @param acquire which parameter we want to get
* @param name name of the can device. This is the netdev name, as ifconfig -a
* shows in your system. usually it contains prefix "can" and the numer of the
* can line. e.g. "can0"
* @param res pointer to store the result
*
* This callback send a dump request into the netlink layer, collect the packet
* containing the linkinfo and fill the pointer res points to depending on the
* acquire mode set in param acquire.
*
* @return 0 if success
* @return -1 if failed
*/
static int do_get_nl_link(int fd, __u8 acquire, const char *name, void *res)
{
struct sockaddr_nl peer;
char cbuf[64];
char nlbuf[1024 * 8];
int ret = -1;
int done = 0;
struct iovec iov = {
.iov_base = (void *)nlbuf,
.iov_len = sizeof(nlbuf),
};
struct msghdr msg = {
.msg_name = (void *)&peer,
.msg_namelen = sizeof(peer),
.msg_iov = &iov,
.msg_iovlen = 1,
.msg_control = &cbuf,
.msg_controllen = sizeof(cbuf),
.msg_flags = 0,
};
struct nlmsghdr *nl_msg;
ssize_t msglen;
struct rtattr *linkinfo[IFLA_INFO_MAX + 1];
struct rtattr *can_attr[IFLA_CAN_MAX + 1];
if (send_dump_request(fd, AF_PACKET, RTM_GETLINK) < 0) {
perror("Cannot send dump request");
return ret;
}
while (!done && (msglen = recvmsg(fd, &msg, 0)) > 0) {
size_t u_msglen = (size_t) msglen;
/* Check to see if the buffers in msg get truncated */
if (msg.msg_namelen != sizeof(peer) ||
(msg.msg_flags & (MSG_TRUNC | MSG_CTRUNC))) {
fprintf(stderr, "Uhoh... truncated message.\n");
return -1;
}
for (nl_msg = (struct nlmsghdr *)nlbuf;
NLMSG_OK(nl_msg, u_msglen);
nl_msg = NLMSG_NEXT(nl_msg, u_msglen)) {
int type = nl_msg->nlmsg_type;
int len;
if (type == NLMSG_DONE) {
done++;
continue;
}
if (type != RTM_NEWLINK)
continue;
struct ifinfomsg *ifi = NLMSG_DATA(nl_msg);
struct rtattr *tb[IFLA_MAX + 1];
len =
nl_msg->nlmsg_len - NLMSG_LENGTH(sizeof(struct ifaddrmsg));
parse_rtattr(tb, IFLA_MAX, IFLA_RTA(ifi), len);
if (strcmp
((char *)RTA_DATA(tb[IFLA_IFNAME]), name) != 0)
continue;
if (tb[IFLA_LINKINFO])
parse_rtattr_nested(linkinfo,
IFLA_INFO_MAX, tb[IFLA_LINKINFO]);
else
continue;
if (acquire == GET_XSTATS) {
if (!linkinfo[IFLA_INFO_XSTATS])
fprintf(stderr, "no can statistics found\n");
else {
memcpy(res, RTA_DATA(linkinfo[IFLA_INFO_XSTATS]),
sizeof(struct can_device_stats));
ret = 0;
}
continue;
}
if (!linkinfo[IFLA_INFO_DATA]) {
fprintf(stderr, "no link data found\n");
return ret;
}
parse_rtattr_nested(can_attr, IFLA_CAN_MAX,
linkinfo[IFLA_INFO_DATA]);
switch (acquire) {
case GET_STATE:
if (can_attr[IFLA_CAN_STATE]) {
*((int *)res) = *((__u32 *)
RTA_DATA(can_attr
[IFLA_CAN_STATE]));
ret = 0;
} else {
fprintf(stderr, "no state data found\n");
}
break;
case GET_RESTART_MS:
if (can_attr[IFLA_CAN_RESTART_MS]) {
*((__u32 *) res) = *((__u32 *)
RTA_DATA(can_attr
[IFLA_CAN_RESTART_MS]));
ret = 0;
} else
fprintf(stderr, "no restart_ms data found\n");
break;
case GET_BITTIMING:
if (can_attr[IFLA_CAN_BITTIMING]) {
memcpy(res,
RTA_DATA(can_attr[IFLA_CAN_BITTIMING]),
sizeof(struct can_bittiming));
ret = 0;
} else
fprintf(stderr, "no bittiming data found\n");
break;
case GET_CTRLMODE:
if (can_attr[IFLA_CAN_CTRLMODE]) {
memcpy(res,
RTA_DATA(can_attr[IFLA_CAN_CTRLMODE]),
sizeof(struct can_ctrlmode));
ret = 0;
} else
fprintf(stderr, "no ctrlmode data found\n");
break;
case GET_CLOCK:
if (can_attr[IFLA_CAN_CLOCK]) {
memcpy(res,
RTA_DATA(can_attr[IFLA_CAN_CLOCK]),
sizeof(struct can_clock));
ret = 0;
} else
fprintf(stderr,
"no clock parameter data found\n");
break;
case GET_BITTIMING_CONST:
if (can_attr[IFLA_CAN_BITTIMING_CONST]) {
memcpy(res,
RTA_DATA(can_attr[IFLA_CAN_BITTIMING_CONST]),
sizeof(struct can_bittiming_const));
ret = 0;
} else
fprintf(stderr, "no bittiming_const data found\n");
break;
case GET_BERR_COUNTER:
if (can_attr[IFLA_CAN_BERR_COUNTER]) {
memcpy(res,
RTA_DATA(can_attr[IFLA_CAN_BERR_COUNTER]),
sizeof(struct can_berr_counter));
ret = 0;
} else
fprintf(stderr, "no berr_counter data found\n");
break;
default:
fprintf(stderr, "unknown acquire mode\n");
}
}
}
return ret;
}
/**
* @ingroup intern
* @brief get_link - get linkinfo
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param acquire which parameter we want to get
* @param res pointer to store the result
*
* This is a wrapper for do_get_nl_link
*
* @return 0 if success
* @return -1 if failed
*/
static int get_link(const char *name, __u8 acquire, void *res)
{
int err, fd;
fd = open_nl_sock();
if (fd < 0)
return -1;
err = do_get_nl_link(fd, acquire, name, res);
close(fd);
return err;
}
/**
* @ingroup intern
* @brief do_set_nl_link - setup linkinfo
*
* @param fd socket file descriptor to a priorly opened netlink socket
* @param if_state state of the interface we want to put the device into. this
* parameter is only set if you want to use the callback to driver up/down the
* device
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param req_info request parameters
*
* This callback can do two different tasks:
* - bring up/down the interface
* - set up a netlink packet with request, as set up in req_info
* Which task this callback will do depends on which parameters are set.
*
* @return 0 if success
* @return -1 if failed
*/
static int do_set_nl_link(int fd, __u8 if_state, const char *name,
struct req_info *req_info)
{
struct set_req req;
const char *type = "can";
memset(&req, 0, sizeof(req));
req.n.nlmsg_len = NLMSG_LENGTH(sizeof(struct ifinfomsg));
req.n.nlmsg_flags = NLM_F_REQUEST | NLM_F_ACK;
req.n.nlmsg_type = RTM_NEWLINK;
req.i.ifi_family = 0;
req.i.ifi_index = if_nametoindex(name);
if (req.i.ifi_index == 0) {
fprintf(stderr, "Cannot find device \"%s\"\n", name);
return -1;
}
if (if_state) {
switch (if_state) {
case IF_DOWN:
req.i.ifi_change |= IFF_UP;
req.i.ifi_flags &= ~IFF_UP;
break;
case IF_UP:
req.i.ifi_change |= IFF_UP;
req.i.ifi_flags |= IFF_UP;
break;
default:
fprintf(stderr, "unknown state\n");
return -1;
}
}
if (req_info != NULL) {
/* setup linkinfo section */
struct rtattr *linkinfo = NLMSG_TAIL(&req.n);
addattr_l(&req.n, sizeof(req), IFLA_LINKINFO, NULL, 0);
addattr_l(&req.n, sizeof(req), IFLA_INFO_KIND, type,
strlen(type));
/* setup data section */
struct rtattr *data = NLMSG_TAIL(&req.n);
addattr_l(&req.n, sizeof(req), IFLA_INFO_DATA, NULL, 0);
if (req_info->restart_ms > 0 || req_info->disable_autorestart)
addattr32(&req.n, 1024, IFLA_CAN_RESTART_MS,
req_info->restart_ms);
if (req_info->restart)
addattr32(&req.n, 1024, IFLA_CAN_RESTART, 1);
if (req_info->bittiming != NULL) {
addattr_l(&req.n, 1024, IFLA_CAN_BITTIMING,
req_info->bittiming,
sizeof(struct can_bittiming));
}
if (req_info->ctrlmode != NULL) {
addattr_l(&req.n, 1024, IFLA_CAN_CTRLMODE,
req_info->ctrlmode,
sizeof(struct can_ctrlmode));
}
/* mark end of data section */
data->rta_len = (void *)NLMSG_TAIL(&req.n) - (void *)data;
/* mark end of link info section */
linkinfo->rta_len =
(void *)NLMSG_TAIL(&req.n) - (void *)linkinfo;
}
return send_mod_request(fd, &req.n);
}
/**
* @ingroup intern
* @brief set_link - open a netlink socket and setup linkinfo
*
* @param name name of the can device. This is the netdev name, as ifconfig -a
* shows in your system. usually it contains prefix "can" and the numer of the
* can line. e.g. "can0"
* @param if_state state of the interface we want to put the device into. this
* parameter is only set if you want to use the callback to driver up/down the
* device
* @param req_info request parameters
*
* This is a wrapper for do_set_nl_link. It opens a netlink socket and sends
* down the requests.
*
* @return 0 if success
* @return -1 if failed
*/
static int set_link(const char *name, __u8 if_state, struct req_info *req_info)
{
int err, fd;
fd = open_nl_sock();
if (fd < 0)
return -1;
err = do_set_nl_link(fd, if_state, name, req_info);
close(fd);
return err;
}
/**
* @ingroup extern
* can_do_start - start the can interface
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
*
* This starts the can interface with the given name. It simply changes the if
* state of the interface to up. All initialisation works will be done in
* kernel. The if state can also be queried by a simple ifconfig.
*
* @return 0 if success
* @return -1 if failed
*/
int can_do_start(const char *name)
{
return set_link(name, IF_UP, NULL);
}
/**
* @ingroup extern
* can_do_stop - stop the can interface
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
*
* This stops the can interface with the given name. It simply changes the if
* state of the interface to down. Any running communication would be stopped.
*
* @return 0 if success
* @return -1 if failed
*/
int can_do_stop(const char *name)
{
return set_link(name, IF_DOWN, NULL);
}
/**
* @ingroup extern
* can_do_restart - restart the can interface
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
*
* This triggers the start mode of the can device.
*
* NOTE:
* - restart mode can only be triggerd if the device is in BUS_OFF and the auto
* restart not turned on (restart_ms == 0)
*
* @return 0 if success
* @return -1 if failed
*/
int can_do_restart(const char *name)
{
int state;
__u32 restart_ms;
/* first we check if we can restart the device at all */
if ((can_get_state(name, &state)) < 0) {
fprintf(stderr, "cannot get bustate, "
"something is seriously wrong\n");
return -1;
} else if (state != CAN_STATE_BUS_OFF) {
fprintf(stderr,
"Device is not in BUS_OFF," " no use to restart\n");
return -1;
}
if ((can_get_restart_ms(name, &restart_ms)) < 0) {
fprintf(stderr, "cannot get restart_ms, "
"something is seriously wrong\n");
return -1;
} else if (restart_ms > 0) {
fprintf(stderr,
"auto restart with %ums interval is turned on,"
" no use to restart\n", restart_ms);
return -1;
}
struct req_info req_info = {
.restart = 1,
};
return set_link(name, 0, &req_info);
}
/**
* @ingroup extern
* can_set_restart_ms - set interval of auto restart.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param restart_ms interval of auto restart in milliseconds
*
* This sets how often the device shall automatically restart the interface in
* case that a bus_off is detected.
*
* @return 0 if success
* @return -1 if failed
*/
int can_set_restart_ms(const char *name, __u32 restart_ms)
{
struct req_info req_info = {
.restart_ms = restart_ms,
};
if (restart_ms == 0)
req_info.disable_autorestart = 1;
return set_link(name, 0, &req_info);
}
/**
* @ingroup extern
* can_set_ctrlmode - setup the control mode.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
*
* @param cm pointer of a can_ctrlmode struct
*
* This sets the control mode of the can device. There're currently three
* different control modes:
* - LOOPBACK
* - LISTEN_ONLY
* - TRIPPLE_SAMPLING
*
* You have to define the control mode struct yourself. a can_ctrlmode struct
* is declared as:
*
* @code
* struct can_ctrlmode {
* __u32 mask;
* __u32 flags;
* }
* @endcode
*
* You can use mask to select modes you want to control and flags to determine
* if you want to turn the selected mode(s) on or off. Every control mode is
* mapped to an own macro
*
* @code
* #define CAN_CTRLMODE_LOOPBACK 0x1
* #define CAN_CTRLMODE_LISTENONLY 0x2
* #define CAN_CTRLMODE_3_SAMPLES 0x4
* @endcode
*
* e.g. the following pseudocode
*
* @code
* struct can_ctrlmode cm;
* memset(&cm, 0, sizeof(cm));
* cm.mask = CAN_CTRLMODE_LOOPBACK | CAN_CTRLMODE_LISTENONLY;
* cm.flags = CAN_CTRLMODE_LOOPBACK;
* can_set_ctrlmode(candev, &cm);
* @endcode
*
* will turn the loopback mode on and listenonly mode off.
*
* @return 0 if success
* @return -1 if failed
*/
int can_set_ctrlmode(const char *name, struct can_ctrlmode *cm)
{
struct req_info req_info = {
.ctrlmode = cm,
};
return set_link(name, 0, &req_info);
}
/**
* @ingroup extern
* can_set_bittiming - setup the bittiming.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param bt pointer to a can_bittiming struct
*
* This sets the bittiming of the can device. This is for advantage usage. In
* normal cases you should use can_set_bitrate to simply define the bitrate and
* let the driver automatically calculate the bittiming. You will only need this
* function if you wish to define the bittiming in expert mode with fully
* manually defined timing values.
* You have to define the bittiming struct yourself. a can_bittiming struct
* consists of:
*
* @code
* struct can_bittiming {
* __u32 bitrate;
* __u32 sample_point;
* __u32 tq;
* __u32 prop_seg;
* __u32 phase_seg1;
* __u32 phase_seg2;
* __u32 sjw;
* __u32 brp;
* }
* @endcode
*
* to define a customized bittiming, you have to define tq, prop_seq,
* phase_seg1, phase_seg2 and sjw. See http://www.can-cia.org/index.php?id=88
* for more information about bittiming and synchronizations on can bus.
*
* @return 0 if success
* @return -1 if failed
*/
int can_set_bittiming(const char *name, struct can_bittiming *bt)
{
struct req_info req_info = {
.bittiming = bt,
};
return set_link(name, 0, &req_info);
}
/**
* @ingroup extern
* can_set_bitrate - setup the bitrate.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param bitrate bitrate of the can bus
*
* This is the recommended way to setup the bus bit timing. You only have to
* give a bitrate value here. The exact bit timing will be calculated
* automatically. To use this function, make sure that CONFIG_CAN_CALC_BITTIMING
* is set to y in your kernel configuration. bitrate can be a value between
* 1000(1kbit/s) and 1000000(1000kbit/s).
*
* @return 0 if success
* @return -1 if failed
*/
int can_set_bitrate(const char *name, __u32 bitrate)
{
struct can_bittiming bt;
memset(&bt, 0, sizeof(bt));
bt.bitrate = bitrate;
return can_set_bittiming(name, &bt);
}
/**
* @ingroup extern
* can_set_bitrate_samplepoint - setup the bitrate.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param bitrate bitrate of the can bus
* @param sample_point sample point value
*
* This one is similar to can_set_bitrate, only you can additionally set up the
* time point for sampling (sample point) customly instead of using the
* CIA recommended value. sample_point can be a value between 0 and 999.
*
* @return 0 if success
* @return -1 if failed
*/
int can_set_bitrate_samplepoint(const char *name, __u32 bitrate,
__u32 sample_point)
{
struct can_bittiming bt;
memset(&bt, 0, sizeof(bt));
bt.bitrate = bitrate;
bt.sample_point = sample_point;
return can_set_bittiming(name, &bt);
}
/**
* @ingroup extern
* can_get_state - get the current state of the device
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param state pointer to store the state
*
* This one stores the current state of the can interface into the given
* pointer. Valid states are:
* - CAN_STATE_ERROR_ACTIVE
* - CAN_STATE_ERROR_WARNING
* - CAN_STATE_ERROR_PASSIVE
* - CAN_STATE_BUS_OFF
* - CAN_STATE_STOPPED
* - CAN_STATE_SLEEPING
*
* The first four states is determined by the value of RX/TX error counter.
* Please see relevant can specification for more information about this. A
* device in STATE_STOPPED is an inactive device. STATE_SLEEPING is not
* implemented on all devices.
*
* @return 0 if success
* @return -1 if failed
*/
int can_get_state(const char *name, int *state)
{
return get_link(name, GET_STATE, state);
}
/**
* @ingroup extern
* can_get_restart_ms - get the current interval of auto restarting.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param restart_ms pointer to store the value.
*
* This one stores the current interval of auto restarting into the given
* pointer.
*
* The socketcan framework can automatically restart a device if it is in
* bus_off in a given interval. This function gets this value in milliseconds.
* restart_ms == 0 means that autorestarting is turned off.
*
* @return 0 if success
* @return -1 if failed
*/
int can_get_restart_ms(const char *name, __u32 *restart_ms)
{
return get_link(name, GET_RESTART_MS, restart_ms);
}
/**
* @ingroup extern
* can_get_bittiming - get the current bittimnig configuration.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param bt pointer to the bittiming struct.
*
* This one stores the current bittiming configuration.
*
* Please see can_set_bittiming for more information about bit timing.
*
* @return 0 if success
* @return -1 if failed
*/
int can_get_bittiming(const char *name, struct can_bittiming *bt)
{
return get_link(name, GET_BITTIMING, bt);
}
/**
* @ingroup extern
* can_get_ctrlmode - get the current control mode.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param cm pointer to the ctrlmode struct.
*
* This one stores the current control mode configuration.
*
* Please see can_set_ctrlmode for more information about control modes.
*
* @return 0 if success
* @return -1 if failed
*/
int can_get_ctrlmode(const char *name, struct can_ctrlmode *cm)
{
return get_link(name, GET_CTRLMODE, cm);
}
/**
* @ingroup extern
* can_get_clock - get the current clock struct.
*
* @param name: name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param clock pointer to the clock struct.
*
* This one stores the current clock configuration. At the time of writing the
* can_clock struct only contains information about the clock frequecy. This
* information is e.g. essential while setting up the bit timing.
*
* @return 0 if success
* @return -1 if failed
*/
int can_get_clock(const char *name, struct can_clock *clock)
{
return get_link(name, GET_CLOCK, clock);
}
/**
* @ingroup extern
* can_get_bittiming_const - get the current bittimnig constant.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param btc pointer to the bittiming constant struct.
*
* This one stores the hardware dependent bittiming constant. The
* can_bittiming_const struct consists:
*
* @code
* struct can_bittiming_const {
* char name[16];
* __u32 tseg1_min;
* __u32 tseg1_max;
* __u32 tseg2_min;
* __u32 tseg2_max;
* __u32 sjw_max;
* __u32 brp_min;
* __u32 brp_max;
* __u32 brp_inc;
* };
* @endcode
*
* The information in this struct is used to calculate the bus bit timing
* automatically.
*
* @return 0 if success
* @return -1 if failed
*/
int can_get_bittiming_const(const char *name, struct can_bittiming_const *btc)
{
return get_link(name, GET_BITTIMING_CONST, btc);
}
/**
* @ingroup extern
* can_get_berr_counter - get the tx/rx error counter.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param bc pointer to the error counter struct..
*
* This one gets the current rx/tx error counter from the hardware.
*
* @code
* struct can_berr_counter {
* __u16 txerr;
* __u16 rxerr;
* };
* @endcode
*
* @return 0 if success
* @return -1 if failed
*/
int can_get_berr_counter(const char *name, struct can_berr_counter *bc)
{
return get_link(name, GET_BERR_COUNTER, bc);
}
/**
* @ingroup extern
* can_get_device_stats - get the can_device_stats.
*
* @param name name of the can device. This is the netdev name, as ifconfig -a shows
* in your system. usually it contains prefix "can" and the numer of the can
* line. e.g. "can0"
* @param bc pointer to the error counter struct..
*
* This one gets the current can_device_stats.
*
* Please see struct can_device_stats for more information.
*
* @return 0 if success
* @return -1 if failed
*/
int can_get_device_stats(const char *name, struct can_device_stats *cds)
{
return get_link(name, GET_XSTATS, cds);
}
void can_write_test(int arg)
{
int s = (int) arg;
struct can_frame frame;
int dlc = 8;
int i, rtr = 0, extended = 0;
ssize_t len;
int err;
struct pollfd fds[] = {
{
.fd = s,
.events = POLLOUT,
},
};
for(i = 0; i < dlc; i++) {
frame.data[i] = 0x31 + i;
}
frame.can_id = 0x100;
frame.can_dlc = dlc;
if (extended) {
frame.can_id &= CAN_EFF_MASK;
frame.can_id |= CAN_EFF_FLAG;
}
else
frame.can_id &= CAN_SFF_MASK;
if (rtr)
frame.can_id |= CAN_RTR_FLAG;
printf("\n CAN0 transfer id: %d", frame.can_id);
printf("\n CAN0 transfer dlc: %d", frame.can_dlc);
printf("\n CAN0 transfer Data:\n");
for (i = 0; i < frame.can_dlc; i++)
printf(" 0x%02x", frame.data[i]);
printf("\n");
again:
while(1) {
err = poll(fds, 1, 1000);
if((err == -1) || (err == 0))
printf("\n poll write error = %d \n", err);
else
break;
}
/* send frame */
len = write(s, &frame, sizeof(frame));
usleep(500);
if(len != sizeof(frame))
printf("\n write error %d \n", errno);
if (len == -1) {
switch (errno) {
case ENOBUFS:
usleep(1000);
break;
case EINTR: /* fallthrough */
usleep(1000);
goto again;
default:
usleep(1000);
goto again;
}
}
printf("\n CAN0 transfer end !!!\n");
}
void can_read_test(int arg)
{
int s = (int) arg;
struct can_frame Rx_frame;
fd_set readfds;
int i;
ssize_t nbytes;
int err;
struct pollfd fds[] = {
{
.fd = s,
.events = POLLIN,
},
};
while(1) {
err = poll(fds, 1, 10000);
if((err == -1) || (err == 0))
printf("\n poll read error =%d ", err);
else
break;
}
nbytes = read(s, &Rx_frame, sizeof(Rx_frame));
printf("\n CAN1 receive id = %d", Rx_frame.can_id);
printf("\n CAN1 receive dlc = %d", Rx_frame.can_dlc);
printf("\n CAN1 receive Data:\n");
for (i = 0; i < Rx_frame.can_dlc; i++)
printf(" 0x%02x", Rx_frame.data[i]);
printf("\n");
}
int main(int argc, char **argv)
{
struct ifreq ifr;
struct sockaddr_can addr;
int family = PF_CAN, type = SOCK_RAW, proto = CAN_RAW;
int s[2];
int j;
can_set_bitrate("can0", 500000);
can_do_start("can0");
can_set_bitrate("can1", 500000);
can_do_start("can1");
for(j = 0; j <= 1; j++)
{
if(j == 0)
{
strcpy(ifr.ifr_name, "can0");
}
else if(j == 1)
{
strcpy(ifr.ifr_name, "can1");
}
s[j] = socket(family, type, proto);
if (s[j] < 0)
{
printf("ERROR");
return 1;
}
addr.can_family = family;
if (ioctl(s[j], SIOCGIFINDEX, &ifr) < 0)
{
printf("ERROR");
return 1;
}
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(s[j], (struct sockaddr *)&addr, sizeof(addr)) < 0)
{
printf("ERROR");
return 1;
}
}
can_write_test(s[0]);
can_read_test(s[1]);
can_do_stop("can0");
can_do_stop("can1");
return 0;
}
参考官方,修改CAN0口测试收发,修改后代码如下
int main(int argc, char **argv)
{
struct can_frame frame;
struct can_frame Rx_frame;
struct ifreq ifr;
struct sockaddr_can addr;
int family = PF_CAN, type = SOCK_RAW, proto = CAN_RAW;
int dlc = 8;
int can0_fd, ret, i, err,rtr = 0, extended = 0;
int j;
int ret1;
int Tx_cnt = 0;
ssize_t nbytes;
can_set_bitrate("can0", 5000);
can_do_start("can0");
strcpy(ifr.ifr_name, "can0");
can0_fd = socket(family, type, proto);
if (can0_fd < 0)
{
printf("ERROR");
return 1;
}
addr.can_family = family;
if (ioctl(can0_fd, SIOCGIFINDEX, &ifr) < 0)
{
printf("ERROR");
return 1;
}
addr.can_ifindex = ifr.ifr_ifindex;
if (bind(can0_fd, (struct sockaddr *)&addr, sizeof(addr)) < 0)
{
printf("ERROR");
return 1;
}
for(i = 0; i < dlc; i++)
{
frame.data[i] = Tx_cnt%34 + i;
Rx_frame.data[i] = 0;
}
frame.can_id = 0x100;
frame.can_dlc = dlc;
if (extended)
{
frame.can_id &= CAN_EFF_MASK;
frame.can_id |= CAN_EFF_FLAG;
}
else
{
frame.can_id &= CAN_SFF_MASK;
}
if (rtr)
frame.can_id |= CAN_RTR_FLAG;
printf("\n CAN0 transfer id: %d", frame.can_id);
printf("\n CAN0 transfer dlc: %d", frame.can_dlc);
printf("\n CAN0 transfer Data:\n");
for (i = 0; i < frame.can_dlc; i++)
printf(" 0x%02x", frame.data[i]);
printf("\n");
ret1 = 0;
for(;;)
{
//send
for(i = 0; i < dlc; i++)
{
frame.data[i] = Tx_cnt%34 + i;
Rx_frame.data[i] = 0;
}
ret = write(can0_fd, &frame, sizeof(frame));
if (ret == -1)
{
printf("write error !! \n");
}
printf("\n CAN0 transfer Data:\t");
for (i = 0; i < frame.can_dlc; i++)
printf(" 0x%02x", frame.data[i]);
Tx_cnt++;
printf("\t Tx: %d \n", Tx_cnt);
//rx
struct pollfd fds[] = {
{
.fd = can0_fd,
.events = POLLIN,
},
};
err = poll(fds, 1, 10000);
switch(err)
{
case -1://出错
printf("\n poll read error =%d ", err);
break;
case 0://超时
printf("\n poll read error =%d ", err);
break;
default:
nbytes = read(can0_fd, &Rx_frame, sizeof(Rx_frame));
printf("\n CAN0 receive id = %d", Rx_frame.can_id);
printf("\n CAN0 receive dlc = %d", Rx_frame.can_dlc);
printf("\n CAN0 receive Data:\n");
for (i = 0; i < Rx_frame.can_dlc; i++)
printf(" 0x%02x", Rx_frame.data[i]);
printf("\n");
break;
}
sleep(10);
}
can_do_stop("can0");
return 0;
}
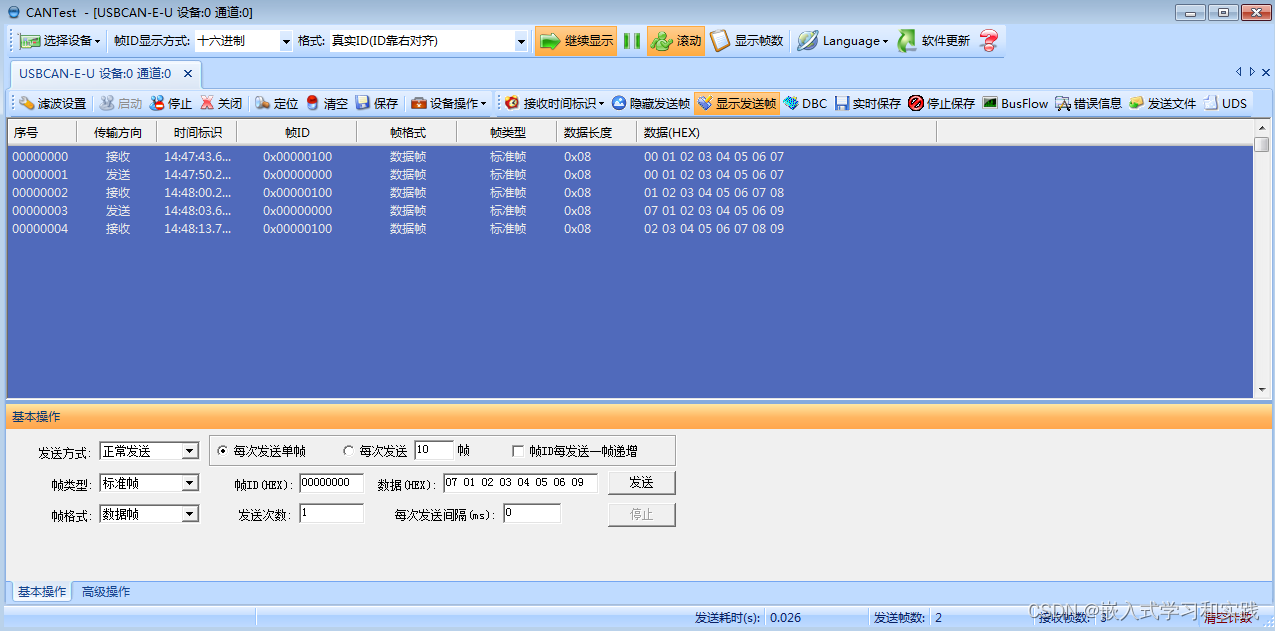
三、测试结果
CAN0口连接周立功USBCAN-E-mini,连接电脑,测试收发。

参考
https://blog.csdn.net/wallace89/article/details/111303439


















 1361
1361

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









