







ResNet50模型简介
ResNet网络层结构如下图所示,以输入彩色图像 224 × 224 224\times224 224×224为例,首先通过数量64,卷积核大小为 7 × 7 7\times7 7×7,stride为2的卷积层conv1,该层输出图片大小为 112 × 112 112\times112 112×112,输出channel为64;然后通过一个 3 × 3 3\times3 3×3的最大下采样池化层,该层输出图片大小为 56 × 56 56\times56 56×56,输出channel为64;再堆叠4个残差网络块(conv2_x、conv3_x、conv4_x和conv5_x),此时输出图片大小为 7 × 7 7\times7 7×7,输出channel为2048;最后通过一个平均池化层、全连接层和softmax,得到分类概率。
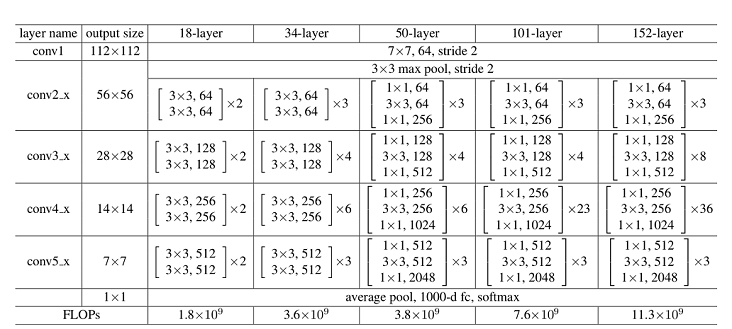
对于每个残差网络块,以ResNet50网络中的conv2_x为例,其由3个Bottleneck结构堆叠而成,每个Bottleneck输入的channel为64,输出channel为256。
残差模块搭建
代码如下:
from typing import Type, Union, List, Optional
import mindspore.nn as nn
from mindspore.common.initializer import Normal
# 初始化卷积层与BatchNorm的参数
weight_init = Normal(mean=0, sigma=0.02)
gamma_init = Normal(mean=1, sigma=0.02)
class ResidualBlockBase(nn.Cell):
expansion: int = 1 # 最后一个卷积核数量与第一个卷积核数量相等
def __init__(self, in_channel: int, out_channel: int,
stride: int = 1, norm: Optional[nn.Cell] = None,
down_sample: Optional[nn.Cell] = None) -> None:
super(ResidualBlockBase, self).__init__()
if not norm:
self.norm = nn.BatchNorm2d(out_channel)
else:
self.norm = norm
self.conv1 = nn.Conv2d(in_channel, out_channel,
kernel_size=3, stride=stride,
weight_init=weight_init)
self.conv2 = nn.Conv2d(in_channel, out_channel,
kernel_size=3, weight_init=weight_init)
self.relu = nn.ReLU()
self.down_sample = down_sample
def construct(self, x):
"""ResidualBlockBase construct."""
identity = x # shortcuts分支
out = self.conv1(x) # 主分支第一层:3*3卷积层
out = self.norm(out)
out = self.relu(out)
out = self.conv2(out) # 主分支第二层:3*3卷积层
out = self.norm(out)
if self.down_sample is not None:
identity = self.down_sample(x)
out += identity # 输出为主分支与shortcuts之和
out = self.relu(out)
return out
Bottleneck模块搭建
from typing import Type, Union, List, Optional
import mindspore.nn as nn
from mindspore.common.initializer import Normal
# 初始化卷积层与BatchNorm的参数
weight_init = Normal(mean=0, sigma=0.02)
gamma_init = Normal(mean=1, sigma=0.02)
class ResidualBlockBase(nn.Cell):
expansion: int = 1 # 最后一个卷积核数量与第一个卷积核数量相等
def __init__(self, in_channel: int, out_channel: int,
stride: int = 1, norm: Optional[nn.Cell] = None,
down_sample: Optional[nn.Cell] = None) -> None:
super(ResidualBlockBase, self).__init__()
if not norm:
self.norm = nn.BatchNorm2d(out_channel)
else:
self.norm = norm
self.conv1 = nn.Conv2d(in_channel, out_channel,
kernel_size=3, stride=stride,
weight_init=weight_init)
self.conv2 = nn.Conv2d(in_channel, out_channel,
kernel_size=3, weight_init=weight_init)
self.relu = nn.ReLU()
self.down_sample = down_sample
def construct(self, x):
"""ResidualBlockBase construct."""
identity = x # shortcuts分支
out = self.conv1(x) # 主分支第一层:3*3卷积层
out = self.norm(out)
out = self.relu(out)
out = self.conv2(out) # 主分支第二层:3*3卷积层
out = self.norm(out)
if self.down_sample is not None:
identity = self.down_sample(x)
out += identity # 输出为主分支与shortcuts之和
out = self.relu(out)
return out
网络整体构建
from mindspore import load_checkpoint, load_param_into_net
class ResNet(nn.Cell):
def __init__(self, block: Type[Union[ResidualBlockBase, ResidualBlock]],
layer_nums: List[int], num_classes: int, input_channel: int) -> None:
super(ResNet, self).__init__()
self.relu = nn.ReLU()
# 第一个卷积层,输入channel为3(彩色图像),输出channel为64
self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, weight_init=weight_init)
self.norm = nn.BatchNorm2d(64)
# 最大池化层,缩小图片的尺寸
self.max_pool = nn.MaxPool2d(kernel_size=3, stride=2, pad_mode='same')
# 各个残差网络结构块定义
self.layer1 = make_layer(64, block, 64, layer_nums[0])
self.layer2 = make_layer(64 * block.expansion, block, 128, layer_nums[1], stride=2)
self.layer3 = make_layer(128 * block.expansion, block, 256, layer_nums[2], stride=2)
self.layer4 = make_layer(256 * block.expansion, block, 512, layer_nums[3], stride=2)
# 平均池化层
self.avg_pool = nn.AvgPool2d()
# flattern层
self.flatten = nn.Flatten()
# 全连接层
self.fc = nn.Dense(in_channels=input_channel, out_channels=num_classes)
def construct(self, x):
x = self.conv1(x)
x = self.norm(x)
x = self.relu(x)
x = self.max_pool(x)
x = self.layer1(x)
x = self.layer2(x)
x = self.layer3(x)
x = self.layer4(x)
x = self.avg_pool(x)
x = self.flatten(x)
x = self.fc(x)
return x















 7万+
7万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









