







极客睿铂
前几期睿铂给大家分享了一些倾斜相机背后的技术,主要都是的关于镜头光学方面的。但实际上倾斜摄影相机还有很多其他关键性技术有待突破,任何技术的发展都不能一蹴而就,需要根据客户的问题反馈,发现新的问题并解决问题,然后不断迭代优化,最终才能开发出贴合用户实际生产生活的核心技术。这是睿铂研发人员痛并快乐的事情,当然也是研发的乐趣所在。
睿铂旗舰产品DG4pros是睿铂目前综合性能最好,技术含量最高的一款相机,出色的性能离不开一项未列入参数列表的“隐藏参数”——拍照同步性时间。在0.6s极值曝光频率下,DG4pros的拍照时间同步性仍可达到2毫秒,这表明相机任意两个镜头之间的拍照间隔时差不会超过2毫秒。意味着当无人机按10m/s速度飞行时,任意两个镜头的位置差均不会超过1cm!下面为大家正式介绍DG4pros关键性技术之一:同步性控制技术。
为什么需要同步性控制
我们都知道作业时,无人机将一个触发信号给倾斜相机的五个镜头,五个镜头理论上应该是绝对同步曝光的,然后同步记录一个pos信息。但是实际作业过程中我们发现,无人机发出一个触发信号之后,五个镜头并不能同步曝光,为什么会出现这个现象呢?
作业完后,我们会发现五个镜头中,不同镜头采集航片的总容量一般都不一样,有的会大一些,有的会小一些。这是因为使用同一种压缩算法时,地物纹理特征的复杂程度对航片的大小造成了影响。而航片的大小,最终影响相机的曝光同步性。
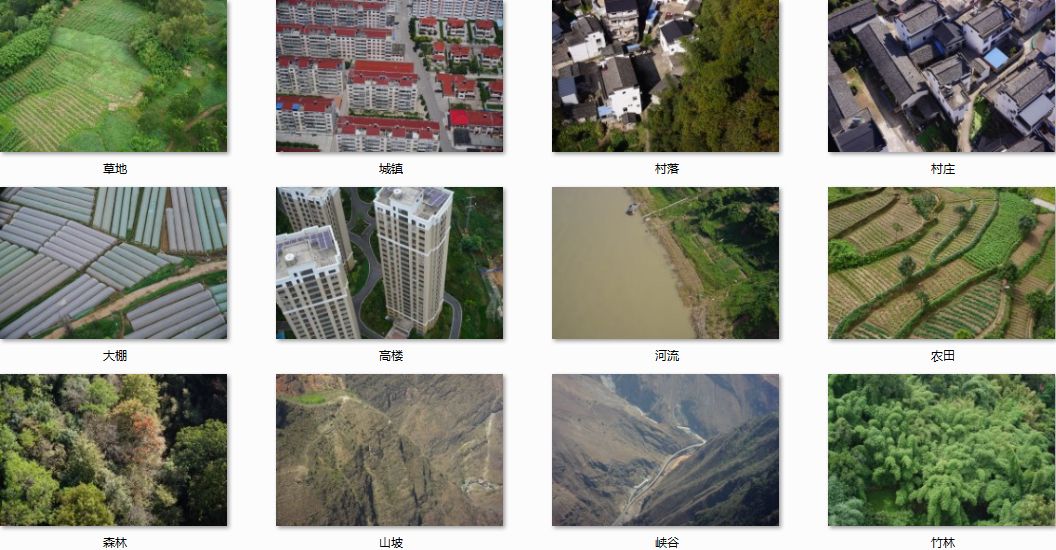
不同环境的纹理
地物纹理越复杂,相机解算、压缩、存储的数据相对都会大一些,也就需要越多的时间完成这些步骤。如果存储时间到达临界点,相机就无法及时地响应快门信号,曝光动作出现滞后。
如拍照触发信号时间比相机完成拍照周期
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 507
507











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









