







输入数据:
- 模拟像片一对:左片号31,右片号32;
- 航摄机主距:f=150mm;左右像片x0=0;y0=0。
左片外方位元素:
φ=-0°25'00″ ω=-1°00'00″ k=-0°10'00″
Xs=103007.006117 Ys=139998.994849 Zs=4801.9989994 (m)
右片外方为元素:
φ=1°39'59″ ω=-0°10'00″ k=0°40'00″
Xs=106002.023762 Ys=140005.002780 Zs=4797.009648 (m)
已知像点坐标如下表:
| 25号片 | 26号片 | |||
| 点号 | X(mm) | Y(mm) | X(mm) | Y(mm) |
| 1 | 0.864 | 2.652 | -100.251 | 1.443 |
| 2 | 97.084 | 2.933 | -4.425 | 0.320 |
| 3 | 1.082 | -76.227 | -102.695 | -79.618 |
| 4 | 0.640 | 82.003 | -99.904 | 81.754 |
| 5 | 95.207 | -75.521 | -5.334 | -78.443 |
| 6 | 96.797 | 83.77 | -3.509 | 79.587 |
- 实验步骤:
(1)读入同名点坐标;
(2)读入内外方位元素;
(3)在利用相应的外定向角元素组成旋转矩阵,将像空间坐标转化为像空辅助坐标(X,Y,Z),公式如下:

(4)再计算点投影系数利用公式:
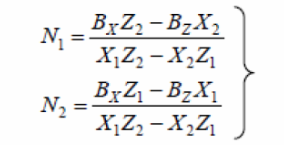
(5)计算模型坐标,公式:

完整代码:
# #!/usr/bin/env python
# # -*- coding: UTF-8 -*-
# '''
# @Project :Calculate_basin
# @File :Ex2.py
# @Author :Ryo
# @Date :2021/11/15 8:27
# '''
import numpy as np
import pandas as pd
import math
#Define a Rotation Array
def Rotation(phi,w,k):
R=np.array([[1,-k,-phi],[k,1,-w],[phi,w,1]])
return R
#import main parameters
f=150
# XS1,YS1,ZS1
leftlin=np.array([103007.006117,139998.994849,4801.9989994])
rightlin=np.array([106002.023762,140005.002780,4797.009648])
leftele=np.array([-25,-60,-10])/60*math.pi/180
rightele=np.array([60+39+59/60,-10,40])/60*math.pi/180
# 左片外方位角元素
# -0°25′00″,-1°00′00″,-0°10′00″
# 右片外方位角元素
# 1°39′59,-0°10′00″,0°40′00″
dataarr=np.array([[0.864,2.652,-100.251,1.443],
[97.084,2.933,-4.425,0.32],
[1.082,-76.227,-102.695,-79.618],
[0.64,82.003,-99.901,81.754],
[95.207,-75.521,-5.334,-78.443],
[96.797,83.77,-3.509,79.587]])
# B(Bx,By,Bz)
B=rightlin-leftlin
R1=Rotation(leftele[0],leftele[1],leftele[2])
R2 = Rotation(rightele[0], rightele[1], rightele[2])
lst=[('Name','X',"Y","Z")]
for i in range(dataarr.__len__()):
# xy1=np.array(df.loc[i,['25X' ,'25Y']])
# xy2=np.array(df.loc[i,['26X' ,'26Y']])
xy1=dataarr[i][0:2]
xy2=dataarr[i][2:4]
print('Left (x,y)=',xy1,'right (x,y)=',xy2)
# a1(X1,Y1,Z1) , a2(X2,Y2,Z2)
xyz1=np.array(list(xy1)+[-f])
xyz2=np.array(list(xy2)+[-f])
a1=np.dot(R1,xyz1)
a2=np.dot(R2,xyz2)
print('left (X,Y,Z)=',a1,'right (X,Y,Z)=',a2)
N1=(B[0]*a2[2]-B[2]*a2[0])/(a1[0]*a2[2]-a1[2]*a2[0])
N2=(B[0]*a1[2]-B[2]*a1[0])/(a1[0]*a2[2]-a1[2]*a2[0])
X=leftlin[0]+N1*a1[0]
Z=leftlin[2]+N1*a1[2]
Y=0.5*((leftlin[1]+N1*a1[1])+(rightlin[1]+N2*a2[1]))
lst.append((i,X,Y,Z))
print('name:',i,' X=',X,' Y=',Y,' Z=',Z,'\n')
'''Create GUI'''
from tkinter import *
class Table:
def __init__(self, root):
# code for creating table
for i in range(total_rows):
for j in range(total_columns):
self.e = Entry(root, width=20, fg='black',
font=('Times New Roman', 20))
self.e.grid(row=i, column=j)
self.e.insert(END, lst[i][j])
#Create GUI
from tkinter import ttk
from tkinter import *
# find total number of rows and
# columns in list
total_rows = len(lst)
total_columns = len(lst[0])
# create root window
root = Tk()
t = Table(root)
root.mainloop()
root = Tk() # 初始框的声明
# Table2
# [X,Y,Z]=inputlist[2:]
columns = ('x_left','y_left','x_right','y_right')
treeview2 = ttk.Treeview(root, height=18, show="headings", columns=columns) # 表格
for i in columns:
treeview2.column(i,width=75,anchor='center')
treeview2.heading(i,text=i)
treeview2.pack(side=LEFT, fill=BOTH)
c1 = [1,2,3,4]
ipcode = [xy1[0], xy1[1],xy2[0],xy2[1]]
for i in range(4): # 写入数据
treeview2.insert('', i, values=(xy1[0], xy1[1],xy2[0],xy2[1]))
#text of Rotaion
text = Text(root, width=40, height=20)
# insert的第一个参数为索引;第二个为添加的内容
text.insert(1.,'Left_Rotation is\n')
text.insert(2.0, R1,'\n')
text.insert(7.,'Right_Rotation is=\n')
text.insert(8.0, R2)
# text.insert(3,'fgjsdfkjgierjgidfkgjol')
text.pack()
root.mainloop() # 进入消息循环

















 2564
2564











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











