







多线程基本概念
线程是进程中一个执行流程,是 CPU 进行执行调度的基本单元;
进程是系统进行资源分配的基本单元。
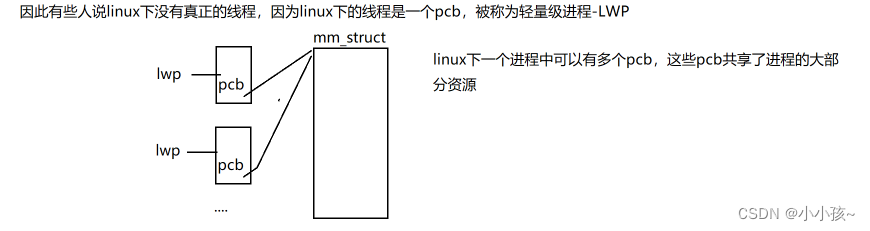
Linux 下一个进程中是可以存在多个 pcb 的,一个 pcb 就是一个执行流程。
1、一个进程中有多个 pcb 与多个进程有多个 pcb 再多执行流程中使用有什么区别?
例如零件加工厂加工零件,若有多个零件需要加工
多进程:
相当于多开几个厂子,多个厂子可以同时进行零件加工;
因此资源消耗大,但是更稳定 健壮性强
多线程:
相当于在一个厂子里边多开几条生产线
资源消耗小,但是健壮性不如多进程
线程是 CPU 调用执行的基本单元,而 Linux 下 pcb 是程序运行过程的描述,因此 Linux 下线程是通过 pcb 来实现的
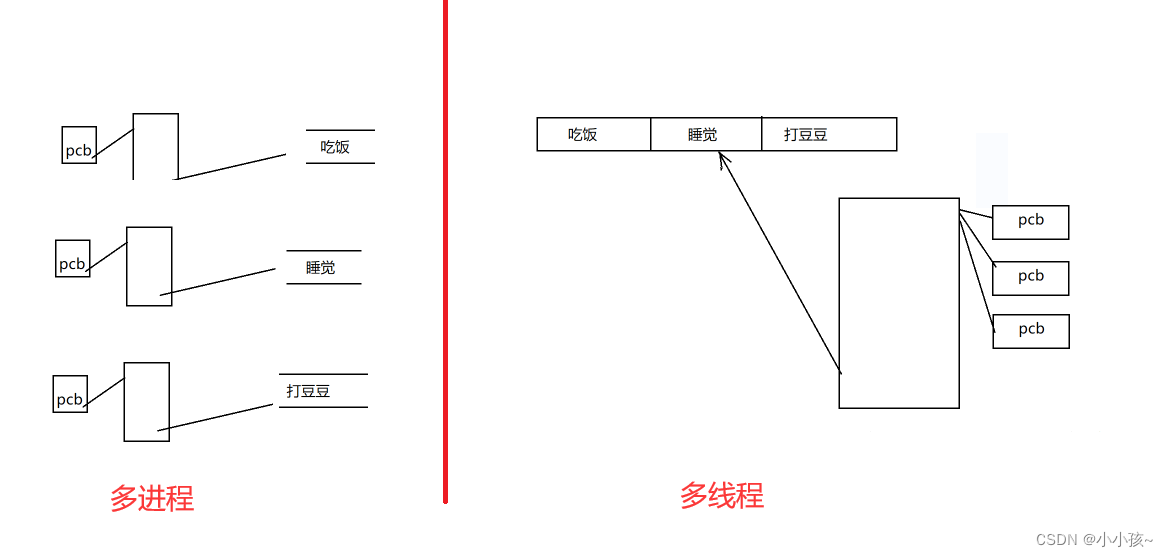
多进程:把多个任务分成多个程序,一个进程执行一个
多线程:把一个整体的程序分为几个不同模块,一个 pcb 负责调度一个模块
2、线程 vs 进程
进程是系统进行资源分配的基本单元(每运行一个程序,系统就要分配一次程序运行所需要的资源)
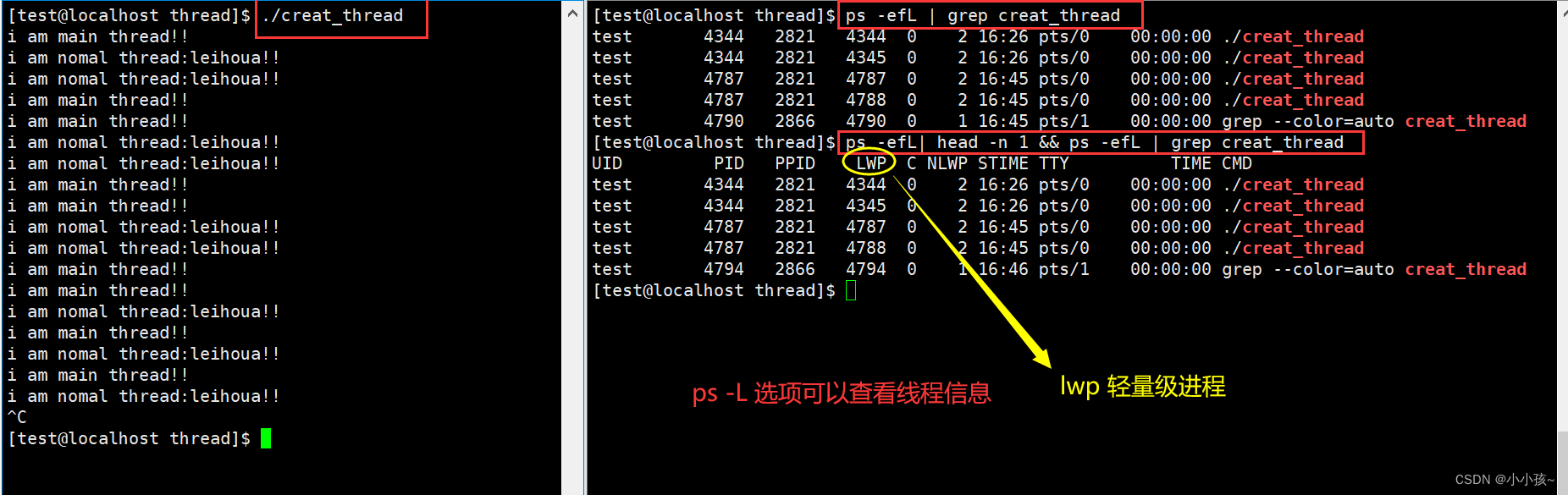
线程是 CPU 进行执行调度的基本单元,在Linux下是通过 pcb 来实现的,一个进程中可以有多个pcb,因此也被称为 轻量级进程 LWP
3、多进程 vs 多线程
多进程:程序更具健壮性、更稳定
多线程:
(1)线程间通信更加灵活(共享虚拟地址,包含进程间通信在内,全局变量、函数传参…)
(2)创建和销毁成本更低(线程之间很多资源都是共享的,创建一个线程不需要分配太多资源)
(3)同进程的线程间调度成本更低(CPU 上加载的快表信息,页表指针…都不需要替换)
对于程序的安全性要求大于性能和资源要求则使用多进程(例如 shell);其余使用多线程
4、多个线程在同一个进程中同时运行为什么不会混乱?
(1)其实每个线程调度执行的就是一个函数;
vfork - 创建子进程,父子进程公用同一个虚拟地址空间,为了避免出现栈运行混乱,因此父进程阻塞直到子进程程序替换或退出
(2)多线程关于执行出现混乱的解决方案:把所有有可能出现混乱的地方给每个线程单独存一份:
线程间独有信息:标识符、栈、上下文数据、信号屏蔽字、errno…
线程间共享信息:虚拟地址空间、文件描述符表、信号处理方式、工作路径、用户ID 、组ID…
5、多任务处理中
多任务处理中使用多执行流完成:
可以更加充分地利用计算机资源, 提升任务处理效率
在多任务处理中使用多少执行流可以由压力测试得到最合适的数量,并不是执行流越多越好,因为执行流越多,cpu 切换调度就越频繁,若执行流太多,反而会造成切换调度消耗大量资源。
6、在任务处理中,程序分两种
(1)cpu 密集型程序:
一段程序几乎都是数据的运算
(2)IO 密集型程序:
一段程序中大部分都是 IO 操作(大部分时间都在进行 IO 操作以及等待,因此对 cpu 使用率并不高)
线程控制
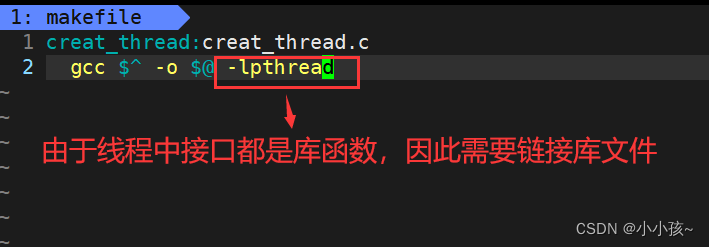
线程中接口都是库函数实现的--------链接库文件 -lpthread
#include <pthread.h> //头文件
创建
int pthread_create(pthread_t *thread, const pthread_attr_t *attr,void *(*start_routine) (void *), void *arg);
(1)thread:传入一个 pthread_t 类型变量的地址空间,用于接收线程 ID ---- 线程的操作句柄
(2)attr:线程属性----通常置NULL
(3)start_routine:函数指针,传入线程入口函数的地址,这个线程调度运行的就是这个函数
(4)arg:给 start_routine 线程入口函数传入的参数;
功能:创建一个线程,指定这个线程要运行的函数 start_routine ,并且给这个函数传入一个数据 arg
返回值:成功 0,失败返回非0(错误码)
1 #include<stdio.h>
2 #include<pthread.h>
3 #include<unistd.h>
4
5 void* thread_entry(void* arg)
6 {
7 //线程入口函数
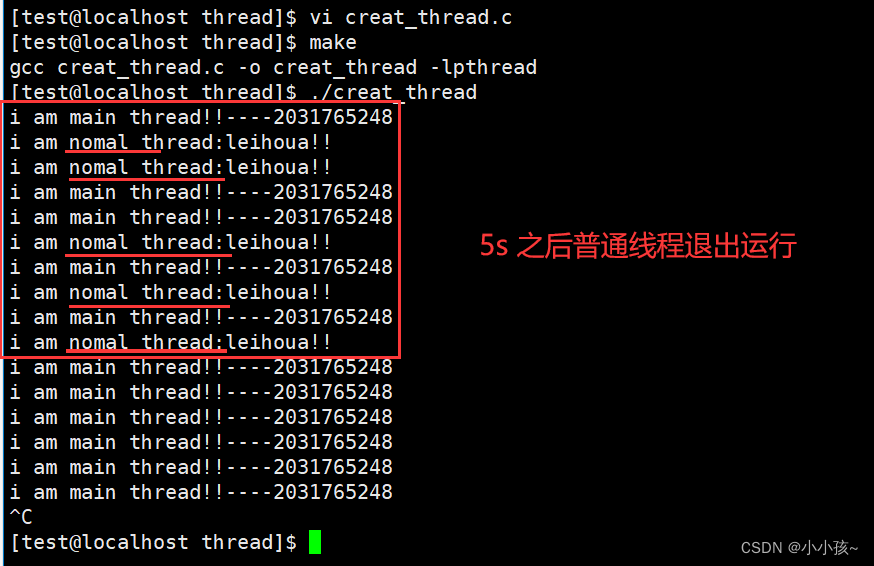
8 while(1){
9 printf("i am nomal thread:%s\n",arg);
10 sleep(1);
11 }
12 return NULL;
13 }
14
15
16 int main()
17 {
18 //线程的创建
19 //int pthread_create(pthread_t *thread, const pthread_attr_t *attr,vo id *(*start_routine) (void *), void *arg);
20
21 pthread_t tid; //用来保存线程 ID
W> 22 char* arg="leihoua!!"; //给线程入口函数传入的参数
23
24 int ret=pthread_create(&tid,NULL,thread_entry,(void*)arg);
25 if(ret!=0){
26 printf("thread create error!\n");
27 return -1;
28 }
29
30 //普通线程一旦创建成功,创建出来的这个线程调度的是传入的线程入口函数, 因此能够走下来的只有主线程
31 //线程中不存在父子线程
32 while(1){
33 printf("i am main thread!!\n");
34 sleep(1);
35 }
36 return 0;
37 }

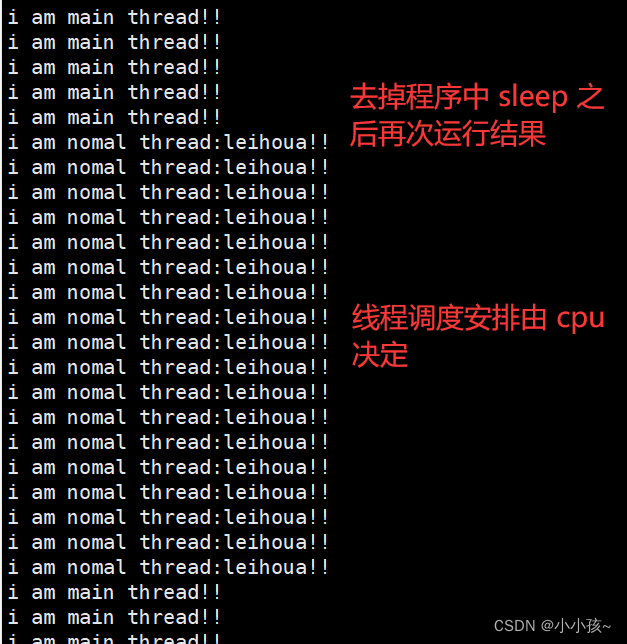
线程被创建出来之后,谁先运行不一定,看操作系统的调度
(1)创建一个线程其实就是让操作系统给我们提供一个执行流,至于这个线程做什么,取决于线程的入口函数(由程序员自己决定)
线程是一个执行流,调度一段函数运行;而函数是一段功能指令的集合
(进程:fork() 创建一个子进程之后,父子进程公用一段代码)
多核:
指的是 cpu 多个核心,一个 cpu 核心有一套自己的寄存器,可以独立进行数据处理指令执行
线程:
是软件层面的一条执行流,是一段程序运行的描述过程
单核 cpu 可以处理多个线程----并发(cpu 分时处理机制,轮询处理)
多核 cpu 可以处理多个线程----并行(同时进行)
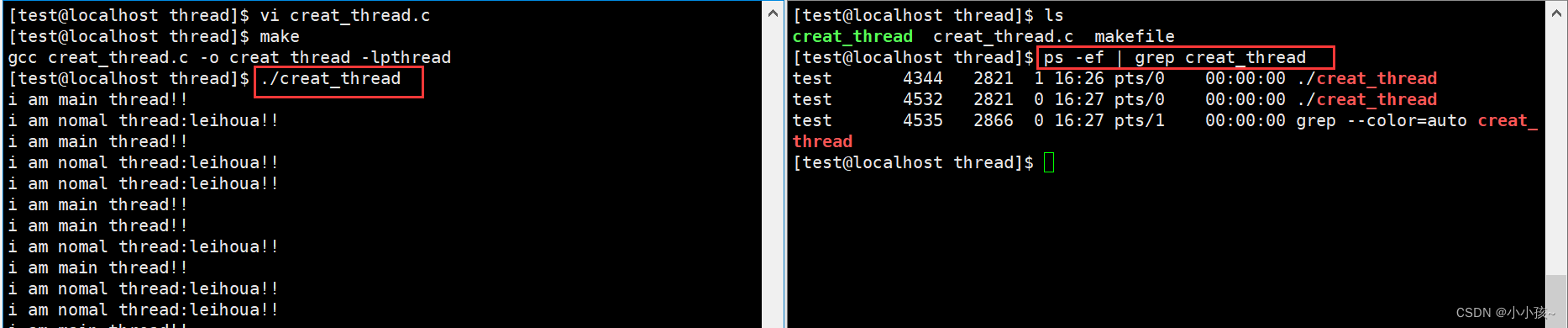
查看线程信息 : ps -L 选项
查看的其实是轻量级进程信息
(2)一个程序运行起来,默认会创建一个线程(pcb),这个线程有自己的 pid
如果下边通过 pthread_create 创建了一个线程(pcb),这个线程也有自己的 pid
真正使用 ps 查看进程信息的时候查看的是主线程 pcb 对应的 pid 信息
(3)pthread_create 接口创建第一个参数获取到的 tid 并不是轻量级进程的 pid(lwp)
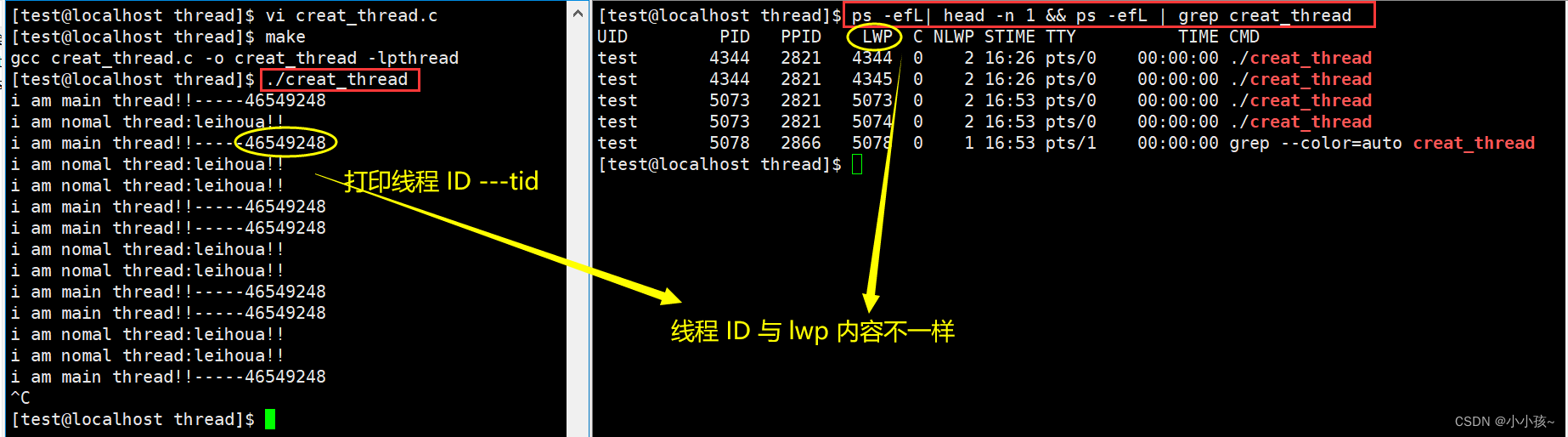
tid 实际保存的是一个地址,这个地址指向了线程相对独立的空间(关于该线程的上层描述)
终止
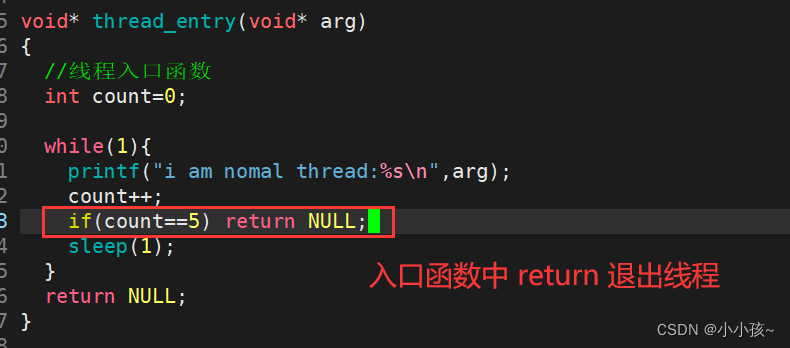
线程终止:退出一个线程的运行
线程其实调用运行的是创建时所传入的入口函数,因此线程的入口函数运行完了,线程就退出了
1、在线程入口函数中 return
注意:main 函数中 return 退出的不仅仅是主线程,还有整个程序
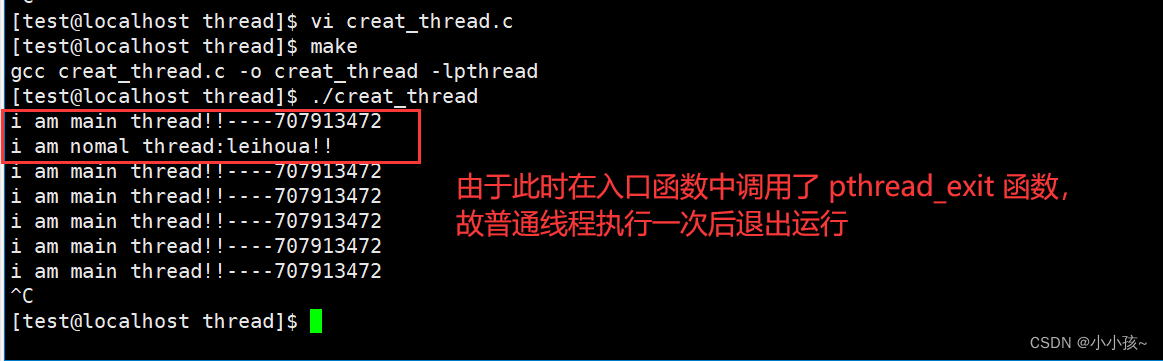
2、在任意位置调用接口实现线程的退出
void pthread_exit(void *retval);
retval :用于设置线程的退出返回值
谁调用谁退出

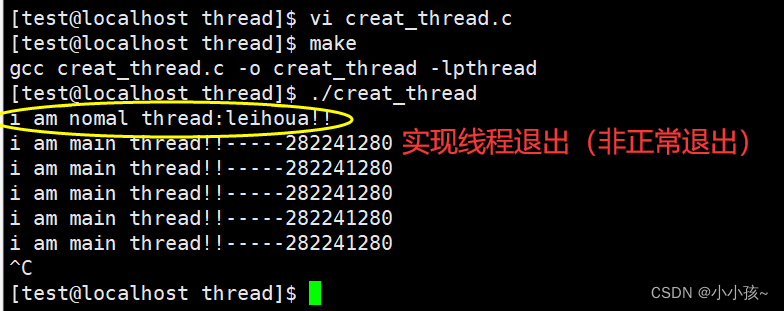
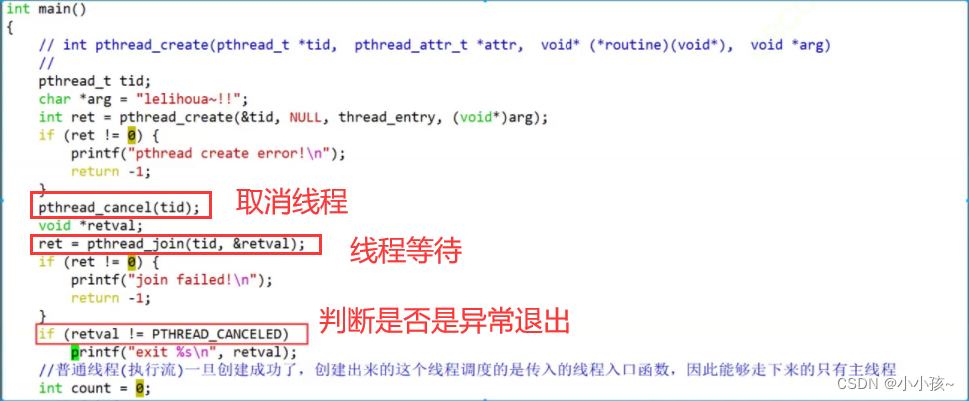
3、在任意位置调用接口用于取消指定线程的运行
int pthread_cancel(pthread_t thread);
一个线程若是被取消的,则返回值就不是一个正经的返回值
线程正常退出是有返回值设置的,但若是 pthread_cancel 取消线程的,则没有设置返回值。

等待
1、主线程退出,其实并不会影响其他线程的运行(不多见);
所有线程退出了,则进程退出释放所有资源;
若进程要退出,则会先退出所有线程。
2、一个线程退出了,资源也并没有完全被释放(要保存返回值)
线程等待:
等待指定的线程退出,获取退出线程的返回值,回收退出线程的所有资源
int pthread_join(pthread_t thread, void **retval);
(1)thread:要等待退出的指定线程 tid
(2)retval:用于获取线程的退出返回值;因为线程退出返回值为 void*,因此传入指针变量的地址,将变量的地址放在指针变量空间
返回值:成功返回 0,失败返回错误编号
线程等待:
#include<stdio.h>
#include<pthread.h>
#include<unistd.h>
void* thread_entry(void* arg)
{
//线程入口函数
int count=0;
while(1){
printf("i am nomal thread:%s\n",arg);
count++;
//pthread_exit(NULL); //任意位置调用可以退出线程
if(count==3)return "nihao "; //返回值为字符串 类型
sleep(1);
}
return NULL;
}
int main()
{
//线程的创建
//int pthread_create(pthread_t *thread, const pthread_attr_t *attr,void *(*start_routine) (void *), void *arg);
pthread_t tid; //用来保存线程 ID
char* arg="leihoua!!"; //给线程入口函数传入的参数
int ret=pthread_create(&tid,NULL,thread_entry,(void*)arg);
if(ret!=0){
printf("thread create error!\n");
return -1;
}
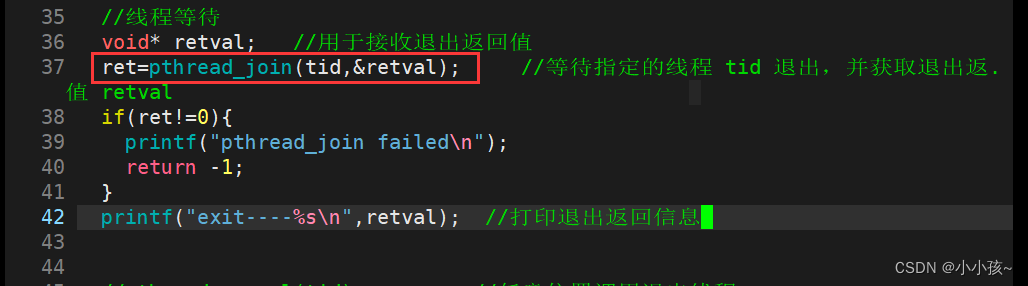
//线程等待
void* retval; //用于接收退出返回值
ret=pthread_join(tid,&retval); //等待指定的线程 tid 退出,并获取退出返回值 retval
if(ret!=0){
printf("pthread_join failed\n");
return -1;
}
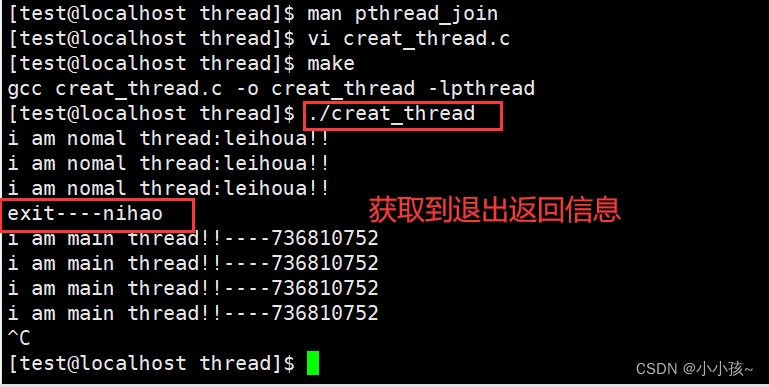
printf("exit----%s\n",retval); //打印退出返回信息
//pthread_cancel(tid); //任意位置调用退出线程
//普通线程一旦创建成功,创建出来的这个线程调度的是传入的线程入口函数,因此能够走下来的只有主线程
//线程中不存在父子线程
while(1){ //打印线程ID
printf("i am main thread!!----%d\n",tid);
sleep(1);
}
return 0;
}
运行结果:
线程之间传递数据一定要注意数据的生命周期
(可以是 malloc 动态申请的空间 \ static 静态数据 \ 字面常量 )
若一个线程是被取消的,则获取的返回值是一个宏:PTHREAD_CANCELED ==== 》 (void*)(-1)
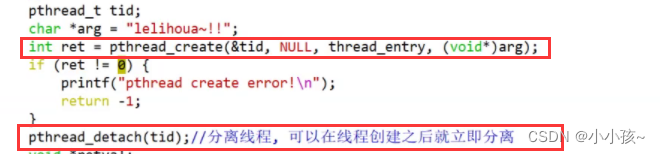
分离
在线程属性中,有一个属性叫做分离属性,默认值是 joinable 状态,表示线程退出后不会自动释放资源, 需要被其他线程等待。
但有时候我们并不关心一个线程的返回值,也不想等待它退出,则这个时候将这个分离属性设置为 detach 状态,表示线程退出后自动释放所有资源,不需要被释放(资源是自动释放的,因此也不能被等待)
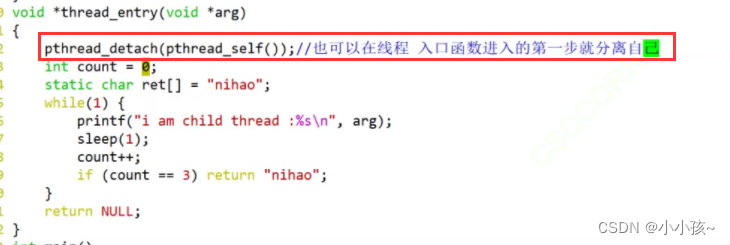
int pthread_detach(pthread_t thread);
设置指定线程的分离属性为 detach
返回值:成功返回0 ,失败返回错误编号
=============================================================================================================================
线程安全
基本概念
不安全:在多线程程序中,若涉及到了对共享资源的操作,则有可能导致数据的二义性。
线程安全:对共享资源的操作不会导致数据二义性
实现
实现:如何实现多线程对共享资源的操作不会出问题?
同步:通过条件控制,让多执行对资源的获取更加合理
互斥:通过同一时间执行流对资源访问的唯一性,保证访问安全
互斥的实现:互斥锁(读写锁、自旋锁…)
同步的实现:条件变量、信号量
互斥锁实现互斥----实现对共享资源的唯一访问
本质也就是一个 0/1计数器,通过 0/1 标记资源的访问状态(0-不可访问,1-可访问)
在访问资源之前进行加锁操作(通过状态判断是否可以访问,不可访问则阻塞);
在访问资源之后进行解锁操作(将资源状态置为可访问状态,唤醒其他阻塞的进程);
多个线程想要实现互斥,就必须访问同一个锁-----------意味着锁是一个共享资源
互斥
互斥锁
互斥锁如何实现自身安全?----> 一步置换
互斥锁本身的计数器操作是原子操作
对变量内容的修改过程----------------将变量从内存中加载到(CPU)寄存器中,在寄存器中修改变量值,再将修改之后的值返回到内存中。
因此对于互斥锁来说,若某一个线程将互斥锁的数据(1-可访问)加载到cpu上进行处理,要修改成 0-不可访问,但是还没有将处理之后的数据返回内存之前,线程进行了切换,第二个进程也要进行加锁操作,要将互斥锁的值(1)加载到 cpu ,此时会形成矛盾。
因此 指令 exchange :交换 cpu 指定寄存器与内存中的数据
互斥锁操作:
1)先将指定寄存器中值修改为 0
2)将寄存器与内存中数据互换
3)判断是否符号获取锁的条件/判断能否可以加锁
置换操作是一条指令完成的,不可被打断
置换之前,把寄存器的值置为 0,因此置换之后内存中互斥锁的值为 0,这样就保证,不管当前线程是否可以加锁,至少在之后的线程都不能进行加锁。
接口
pthread_mutex_t :互斥锁变量类型
初始化互斥锁
int pthread_mutex_init(pthread_mutex_t *restrict mutex, const pthread_mutexattr_t *restrict attr);
(1)mutex:互斥锁变量地址
(2)attr:互斥锁变量属性-----NULL
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
这种初始化,不需要使用 destroy 进行释放
访问资源前进行加锁
int pthread_mutex_lock(pthread_mutex_t *mutex);
阻塞加锁; 加不上锁则一直等待
int pthread_mutex_trylock(pthread_mutex_t *mutex);
非阻塞加锁;加不上锁则立即报错返回
int pthread_mutex_unlock(pthread_mutex_t *mutex);
访问资源完毕之后进行解锁
释放销毁互斥锁
int pthread_mutex_destroy(pthread_mutex_t *mutex);
练习
1、多线程中共享资源访问若不加锁可能会出什么问题?
2、如何通过使用互斥锁来保护临界区(共享资源的访问过程)
练习代码:
#include<stdio.h>
#include<pthread.h>
int ticket=100;
void* Scalper(void* arg)
{
//入口函数
while(1){
if(ticket>0){
printf("%p 抢到了 %d 号票\n",pthread_self(),ticket);
ticket--;
}else{
printf("票没了~~!\n");
break;
}
}
return NULL;
}
int main()
{
pthread_t tid[4]; //创建四个线程
int i=0;
for(i=0;i<4;++i){
int ret=pthread_create(&tid[i],NULL,Scalper,NULL);
//四个线程调用入口函数的顺序是不一定的
if(ret!=0){
printf("create pthread error~!\n");
return -1;
}
}
for(i=0;i<4;++i){
pthread_join(tid[i],NULL); //等待指定的线程退出,退出返回值 NULL
}
return 0;
}

由于判断有没有票与抢票过程不是原子性的不是一次性完成的,中间有可能被打断,因此存在其他线程也可以抢-----------------------定义互斥锁
在定义线程之前定义锁, 并对其进行初始化操作。
#include<stdio.h>
#include<pthread.h>
#include<unistd.h>
int ticket=100;
void* Scalper(void* arg)
{
pthread_mutex_t *mutex=(pthread_mutex_t*)arg; //定义互斥锁
//入口函数
while(1){
pthread_mutex_lock(mutex); //进行加锁操作
usleep(10);
if(ticket>0){
printf("%p 抢到了 %d 号票\n",pthread_self(),ticket);
ticket--;
//抢票结束进行解锁
pthread_mutex_unlock(mutex);
}else{
printf("票没了~~!\n");
pthread_mutex_unlock(mutex);
//加锁后在任意有可能退出线程的地方都需要解锁
pthread_exit(NULL); //线程退出
}
}
usleep(1);
return NULL;
}
int main()
{
pthread_t tid[4]; //创建四个线程
pthread_mutex_t mutex; //定义互斥锁
pthread_mutex_init(&mutex,NULL); //互斥锁的初始化操作
int i=0;
for(i=0;i<4;++i){
int ret=pthread_create(&tid[i],NULL,Scalper,&mutex); //将锁传给入口函数参数
if(ret!=0){
printf("create pthread error~!\n");
return -1;
}
}
for(i=0;i<4;++i){
pthread_join(tid[i],NULL); //等待指定的线程退出,退出返回值 NULL
}
//线程运行结束释放锁
pthread_mutex_destroy(&mutex);
return 0;
}
死锁
多个线程对锁资源的争抢使用不当导致程序流程卡死,无法继续向下推进的状态
(1)加锁之后没有释放就退出,导致其它线程获取不到锁资源卡死;
(2)多锁使用,加锁顺序不当,线程 1 加锁顺序为 AB,线程 2 加锁顺序为 BA
死锁产生的必要条件
(1)互斥条件:
同一时间一个锁只能被一个线程获取,多个线程无法同时加同一把锁;
(2)不可剥夺条件:
一个线程加的锁,只有自己可以释放,其他线程不能释放
(3)请求与保持条件:
线程加 A 锁后请求 B 锁,若请求不到 B 锁也不释放 A 锁
(4)环路等待条件:
线程 1 加锁 A 请求 B 锁,线程 2 加锁 B 请求 A 锁
预防死锁产生-------破坏死锁产生的必要条件
1、2 是互斥锁的要义所在,是无法进程破坏的;因此在写代码时应格外注意:
(1)多个线程间加锁顺序要保持一致:预防环路条件产生
(2)采用非阻塞加锁,若加不上锁,则把已经加锁成功的释放----破环请求与保持条件
避免死锁
(1)银行家算法--------风险控制
将系统运行状态分为:安全状态 、不安全状态
建立三张表:
资源剩余表:有没有这个资源可以分配
资源分配表:一旦请求的资源被分配了,是否会导致系统进入非安全状态(不能分配)
资源请求表:谁请求什么资源
(2)死锁检测算法
、、、
同步
通过条件控制让多线程对资源的获取更加合理
互斥只能保证安全,不一定能保证合理
同步能保持合理,不一定能保持安全
资源获取的合理:
有资源才能处理,没资源则阻塞—等有资源在唤醒处理
条件变量
提供一个 pcb 等待队列以及阻塞和唤醒线程的接口
思想:
若一个线程不满足获取资源的条件则通过阻塞接口阻塞线程
一个线程促使资源获取条件满足了,则通过唤醒接口唤醒线程
注意:
(1)条件变量本身并不知道什么时候该阻塞,什么时候唤醒,仅仅是提供了阻塞和唤醒的接口-------------具体由程序员来控制
(2)促使条件满足 & 判断获取条件是否满足,是在多个线程中操作,因此条件的操作其实就是一个临界资源的操作(需要加锁保护)
条件变量是与互斥锁搭配使用的
操作接口:
1.定义条件变量
pthread_cond_t :条件变量的变量类型
2.初始化条件变量
(1)pthread_cond_t cond = PTHREAD_COND_INITIALIZER;
(2)int pthread_cond_init(pthread_cond_t *restrict cond , const pthread_condattr_t *restrict attr);
cond:条件变量
attr:条件变量的属性----- NULL
3.阻塞接口:条件变量是搭配互斥锁一起使用
(1)阻塞
int pthread_cond_wait(pthread_cond_t *restrict cond , pthread_mutex_t *restrict mutex);
cond:条件变量
mutex:互斥锁
(2)有时长限制的阻塞
int pthread_cond_timedwait(pthread_cond_t *restrict cond,pthread_mutex_t *restrict mutex, const struct timespec *restrict abstime);
返回值为:ETIMEDOUT 表示时间到了
4.唤醒接口
(1)int pthread_cond_signal(pthread_cond_t *cond);
唤醒至少一个阻塞队列中的线程
(2)int pthread_cond_broadcast(pthread_cond_t *cond);
唤醒等待队列中的所有线程
5.销毁接口
int pthread_cond_destroy(pthread_cond_t *cond);
示例代码
例如,顾客前往餐厅吃饭的过程
//首先定义好所需变量-----全局
int counter=0; //0-柜台没饭,1-柜台有饭
pthread_mutex_t mutex; //定义互斥锁
pthread_cond_t cond; //定义条件变量
顾客:
假如餐厅柜台上此时有饭,则顾客进来之后可以直接吃饭,假如柜台上此时没有饭或者想要再来一碗,则会等待厨师做饭(阻塞----阻塞前唤醒厨师来做饭)
9 void* Customer(void* arg){
10 while(1){
11 pthread_mutex_lock(&mutex); //首先加锁
12 if(counter==0){ //判断有无饭
13 //柜台没有饭,需要阻塞等待----解锁-休眠-被唤醒后加锁
14 pthread_cond_wait(&cond,&mutex);
15 }
16 //否则,counter = 1 有饭
17 printf("饭好吃,再来一碗!\n");
18 counter=0; //此时需要修改 counter 的值
19 pthread_cond_signal(&cond); //唤醒厨师做饭
20 pthread_mutex_unlock(&mutex); //解锁
21 }
22 return 0;
23 }
24
厨师:
假如餐厅柜台上没有饭则做饭,假如柜台上有饭则阻塞(唤醒阻塞等待队列中顾客来吃饭)
25 void* Cook(void* arg){
26 while(1){
27 pthread_mutex_lock(&mutex); //首先加锁
28 if(counter==1){
29 //有饭,则阻塞
30 pthread_cond_wait(&cond,&mutex);
31 }
32 //否则,counter = 0 没有饭,需要做饭
33 printf("饭好了,快来吃饭!\n");
34 counter=1; //做好饭,修改 counter 值
35 pthread_cond_signal(&cond); //唤醒顾客来吃饭
36 pthread_mutex_unlock(&mutex); //解锁
37 }
38 return 0;
39 }
40
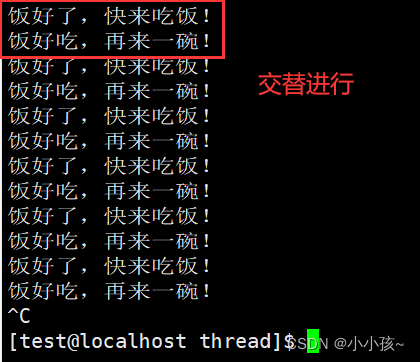
因此,顾客与厨师之间是交替进行操作的一个过程(一个顾客一个厨师的测试),详细代码参考gitee中 thread_conda.c 文件
倘若对于多顾客多厨师的现象:
不更改顾客与厨师入口函数,仅增加线程个数则会发生不匹配现象
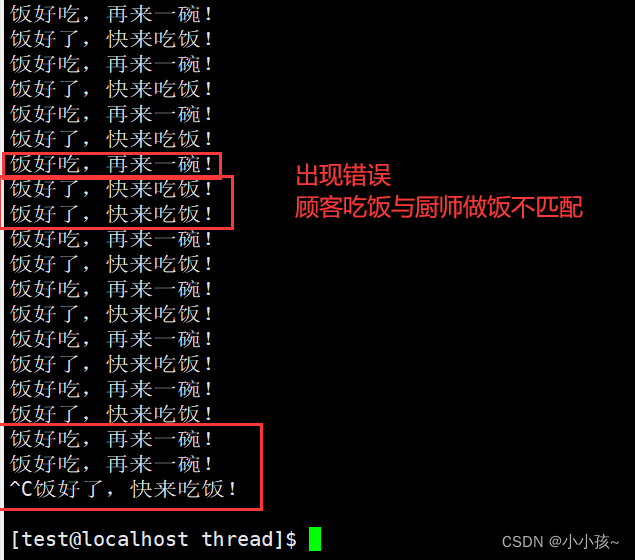
分析:
有四名顾客,此时 1号顾客加锁成功可以吃饭,其余顾客则会阻塞在加锁这一步,而 1号顾客吃完饭后唤醒厨师(唤醒阻塞队列中至少一个线程)来做饭,若此时cpu时间片并未轮转到厨师,而是分配给了2号3号4号顾客,顾客判断没有饭吃,也会唤醒厨师来做饭,因此会导致厨师被唤醒多次,同理,厨师做好饭唤醒顾客也会唤醒多次,从而导致不匹配现象的出现。
多个线程需要将入口函数中 if 换为 while 循环,但又发生了阻塞:
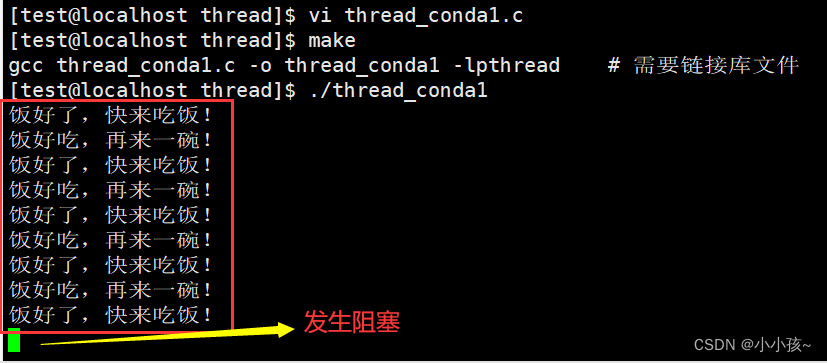
这是因为顾客与厨师都等待在同一个阻塞队列中,就有可能在一个顾客吃完饭之后,唤醒的不是厨师而是其他顾客,导致多名顾客没有饭吃而重新陷入休眠,造成流程卡死--------------------------------解决方案:让不同的线程等待在不同的队列上(多个条件变量)
因此,改进之后的最优化代码:
1 #include<stdio.h>
2 #include<pthread.h>
3
4 //多个顾客多个厨师
5 //
6
7 int counter=0; //0-柜台没饭,1-柜台有饭
8
9 pthread_mutex_t mutex; //定义互斥锁
10 pthread_cond_t cond_cook; //定义条件变量
11 pthread_cond_t cond_cus; //定义条件变量
12
13 void* Customer(void* arg){
14 while(1){
15 pthread_mutex_lock(&mutex); //首先加锁
16 while(counter<=0){ //判断有无饭
17 //柜台没有饭,需要阻塞等待----解锁-休眠-被唤醒后加锁
18 pthread_cond_wait(&cond_cus,&mutex);
19 }
20 //否则,counter = 1 有饭
21 printf("饭好吃,再来一碗!\n");
22 counter--;
23 pthread_cond_signal(&cond_cook); //唤醒厨师做饭
24 pthread_mutex_unlock(&mutex); //解锁
25 }
26 return NULL;
27 }
28
29 void* Cook(void* arg){
30 while(1){
31 pthread_mutex_lock(&mutex); //首先加锁
32 while(counter>=1){
33 //有饭,则阻塞
34 pthread_cond_wait(&cond_cook,&mutex);
35 }
36 //否则,counter = 0 没有饭,需要做饭
37 printf("饭好了,快来吃饭!\n");
38 counter++;
39 pthread_cond_signal(&cond_cus); //唤醒顾客
40 pthread_mutex_unlock(&mutex); //解锁
41 }
42 return NULL;
43 }
44
45 int main()
46 {
47 //创建两个线程----顾客,厨师
48 pthread_t cus_tid[4],cook_tid[4];
49 int ret;
50 //初始化操作----初始化互斥锁与条件变量
51 pthread_mutex_init(&mutex,NULL);
52 pthread_cond_init(&cond_cus,NULL);
53 pthread_cond_init(&cond_cook,NULL);
54
55 int i=0;
56 for(;i<4;++i){
57 ret=pthread_create(&cus_tid[i],NULL,Customer,NULL);
58 if(ret!=0){
59 perror("pthread_create error!\n");
60 return -1;
61 }
62 }
63
64 for(i=0;i<4;++i){
65 ret=pthread_create(&cook_tid[i],NULL,Cook,NULL);
66 if(ret!=0){
67 perror("pthread_create error!\n");
68 return -1;
69 }
70 }
71
72 //线程等待-----等待任意固定线程退出
73 pthread_join(cus_tid[0],NULL);
74 pthread_join(cook_tid[0],NULL);
75
76
77 //销毁
78 pthread_mutex_destroy(&mutex);
79 pthread_cond_destroy(&cond_cus);
80 pthread_cond_destroy(&cond_cook);
81
82 return 0;
83 }
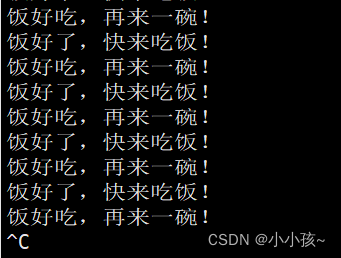
正确运行的结果:
线程应用
生产者与消费者模型
应用场景:有大量数据任务产生的同时需要进行任务处理的场景
单执行流处理的缺点:
(1)效率低
(2)资源利用不一定合理(由于任务的产生与处理在同一个线程中)
(3)耦合度比较强:若一个任务的处理方式发生了一些变化,则需要对整体代码进行修改重新编译
生产者与消费者模型针对的是大量数据产生并处理的场景,针对这种场景的优势:
(1)解耦合
(2)支持忙闲不均
(3)支持并发
可以根据数据的产生速度来决定生产者线程的数量;
可以根据任务处理的速度来决定消费者线程的数据;
并且若峰值压力下,数据产生过快,可以在任务队列中将数据放入缓冲区,慢慢处理
实现
生产者与消费者模型中,其实生产者与消费者就是两种不同功能角色的线程,通过线程安全的队列进行缓冲交互
生产者与生产者之间的关系:互斥
消费者与消费者之间的关系:互斥
生产者与消费者之间的关系:同步+互斥(不能同时进行操作)
封装实现一个线程安全的阻塞队列,创建多个线程入队数据,多个线程出队数据处理
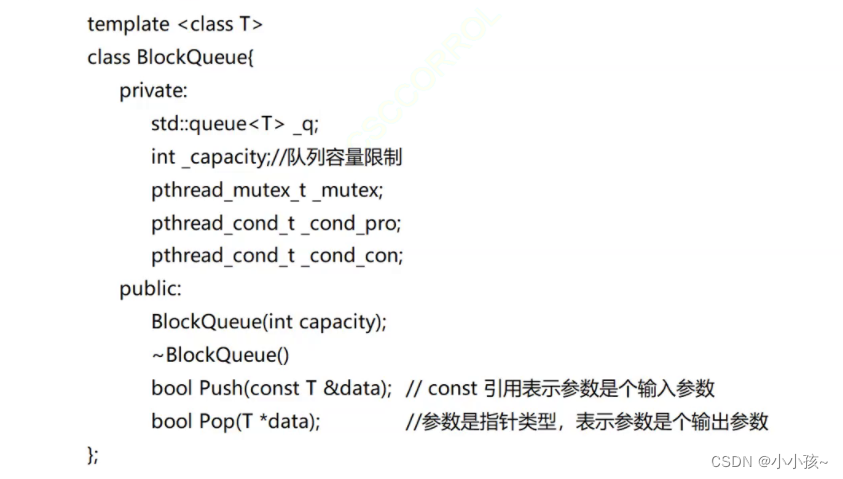
生产者与消费者模型相关代码:(阻塞队列中会存在边进边出的情况)
添加链接描述
信号量
主要用来实现线程间的互斥与同步
本质上是一个计数器:
P操作:对计数器-1,若小于0则表示没有资源–阻塞线程
V操作:对计数器+1,唤醒一个阻塞中的线程
同步:
初始化计数器为资源数量,线程A获取资源前进行P操作;线程B产生一个资源后进行V操作
互斥:
初始化计数器为1,线程访问资源之前进行P操作,访问资源完毕之后进行V操作(同一线程模拟PV实现加解锁)
信号量是通过资源计数来实现同步,主要是统计资源的(信号量通过自身的计数就可以完成条件判断)
POSIX标准下接口信息:
#include <semaphore.h> 头文件
信号量变量类型:sem_t sem
信号量初始化:
int sem_init(sem_t *sem, int pshared, unsigned int value);
(1)sem:定义的信号量变量
(2)pshared:0-线程间使用,!0-进程间使用(共享内存实现)
(3)value:初始化值
P 操作:
int sem_wait(sem_t *sem); //阻塞接口
int sem_trywait(sem_t *sem); //非阻塞接口–报错返回
int sem_timedwait(sem_t *sem, const struct timespec *abs_timeout); //限制时长的阻塞
V 操作:
int sem_post(sem_t *sem);
信号量的销毁:
int sem_destroy(sem_t *sem);
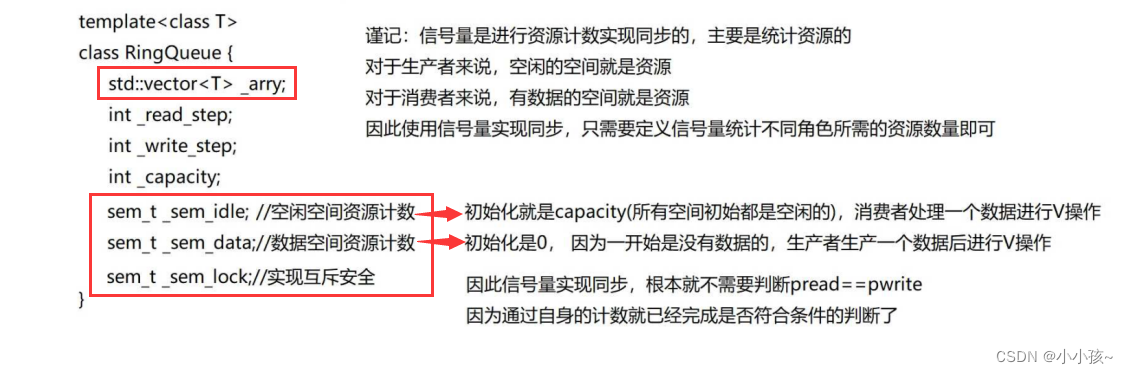
采用信号量实现环形队列(通常采用数组来实现):
pwrite 指向当前可以进行写入数据的位置
pread 指向当前可以进行读取数据的位置
当 (pwrite+1)%capacity==pread 时候,说明当前环形队列已经存满了
使用信号量来实现环形队列相关测试代码:
添加链接描述
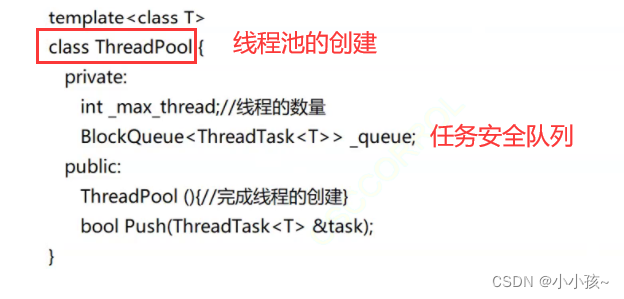
线程池*
构建一个线程的池子,有数据来了就从池子中分配一个线程出来处理即可,处理完毕还回去
实际的实现:
先创建固定数量的线程,以及一个线程安全的任务队列,池子中线程的工作就是不断从任务队列中取出任务进行处理,处理完了没任务了就阻塞
优点:
(1)数据任务可以在任务队列中缓冲,并且数量都是可以灵活控制的,避免峰值压力下资源耗尽的风险;
(2)避免了线程的频繁创建与销毁带来的时间成本;
重点:
线程池只是一个执行流的池子,本身并不知道一个任务该如何进行处理,因此需要设计一个任务类:

线程池相关测试代码参考:
添加链接描述
单例模式
设计模式:针对典型场景所设计的解决方案
单例模式:就是一种典型的设计模式
单例模式针对的场景:一个类只能实例化一个对象
(1)资源角度:资源在内存中只能存在一份
(2)数据角度:若只有一个对象,则数据无论在什么时候获取都是一致的
单例模式的实现:对象只有一个,提供一个访问接口进行访问
饿汉模式
直接将对象实例化完毕,资源申请完毕,以便于用的时候能够随时使用(以空间换时间)
好处:效率最大化,资源使用时候直接可以用(不涉及线程安全---对象实例化在初始化时候完成)
坏处:程序初始化速度慢,占用内存资源多
实现
将对象设置为静态资源,这样就可以在程序初始化阶段完成实例化
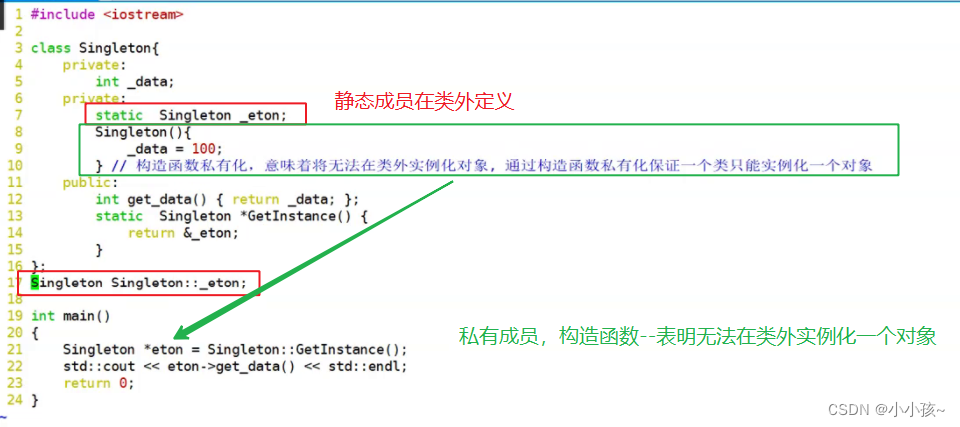
(1)类内声明唯一的对象,需要声明为静态对象(静态成员类外定义),这样才能保证在初始化阶段进行实例化;
(2)构造函数私有化(保证无法在类外构造其他对象,一个类只能构造一个对象);
(3)提供访问接口进行访问
懒汉模式
对象在使用的时候在进行实例化,资源用的时候在申请(延迟加载思想)
好处:占用内存资源少,程序初始化速度快(涉及到线程安全问题)
坏处:需要访问一个资源时候需要实例化对象进行加载资源
实现
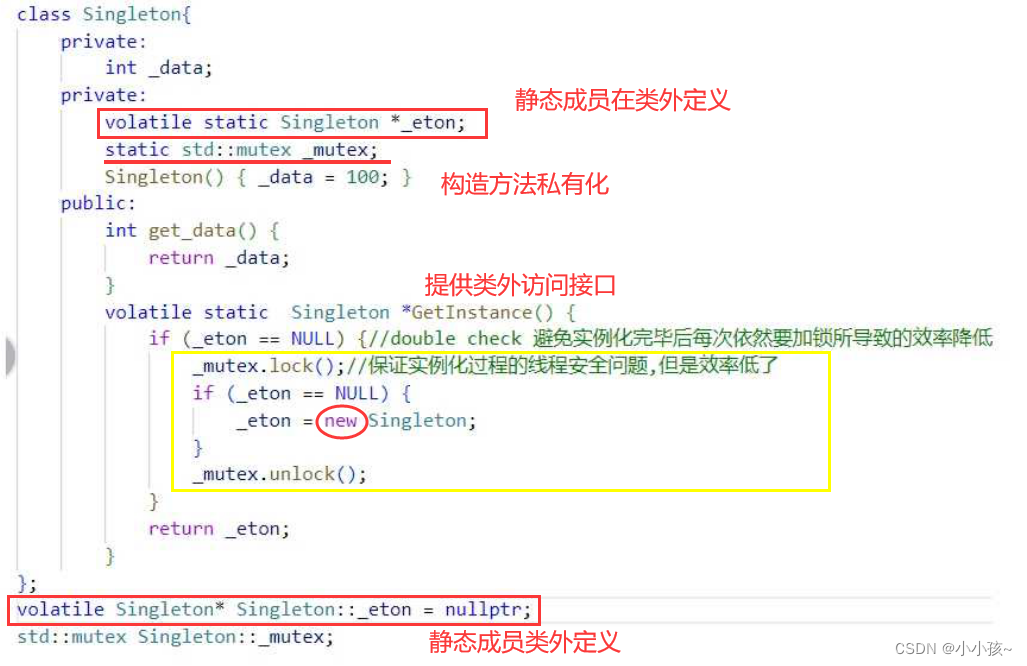
(1)定义静态对象指针,用的时候进行 new;
(2)new 过程中需要考虑线程安全问题,需要进行加解锁;
(3)double check 双重检验,提升效率;
(4)volatile 进行修饰,防止编译器过度优化(提示内存可见性)
ps:
线程相关知识就分享到这里啦,欢迎各位读者评论留言鸭~~















 361
361











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









