







1 背景
去年我理解了torch.gather()用法,今年看到又给忘了,索性把自己的理解梳理出来,方便今后遗忘后快速上手。
官方文档:
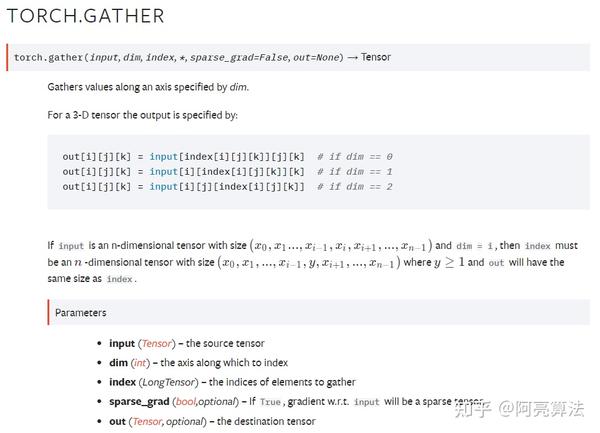
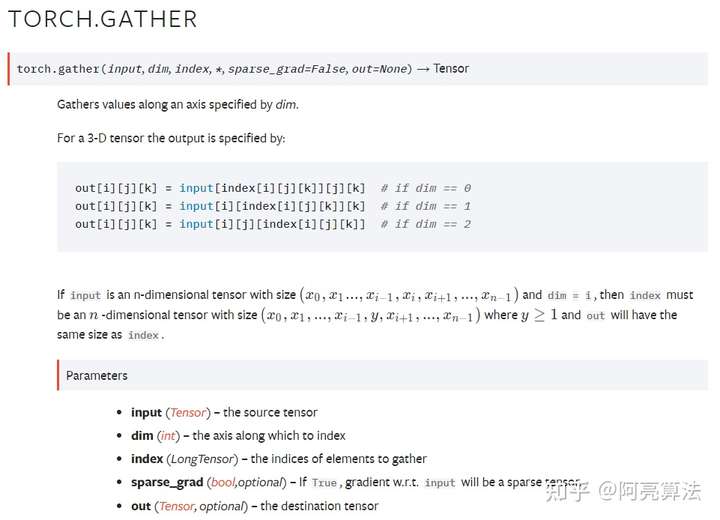
官方文档对torch.gather()的定义非常简洁
定义:从原tensor中获取指定dim和指定index的数据
看到这个核心定义,我们很容易想到gather()的基本想法其实就类似从完整数据中按索引取值般简单,比如下面从列表中按索引取值
lst = [1, 2, 3, 4, 5]
value = lst[2] # value = 3
value = lst[2:4] # value = [3, 4]
上面的取值例子是取单个值或具有逻辑顺序序列的例子,而对于深度学习常用的批量tensor数据来说,我们的需求可能是选取其中多个且乱序的值,此时gather()就是一个很好的tool,它可以帮助我们从批量tensor中取出指定乱序索引下的数据,因此其用途如下
用途:方便从批量tensor中获取指定索引下的数据,该索引是 高度自定义化的,可乱序的
2 实战
我们找个3x3的二维矩阵做个实验
import torch
tensor_0 = torch.arange(3, 12).view(3, 3)
print(tensor_0)
输出结果
tensor([[ 3, 4, 5],
[ 6, 7, 8],
[ 9, 10, 11]])
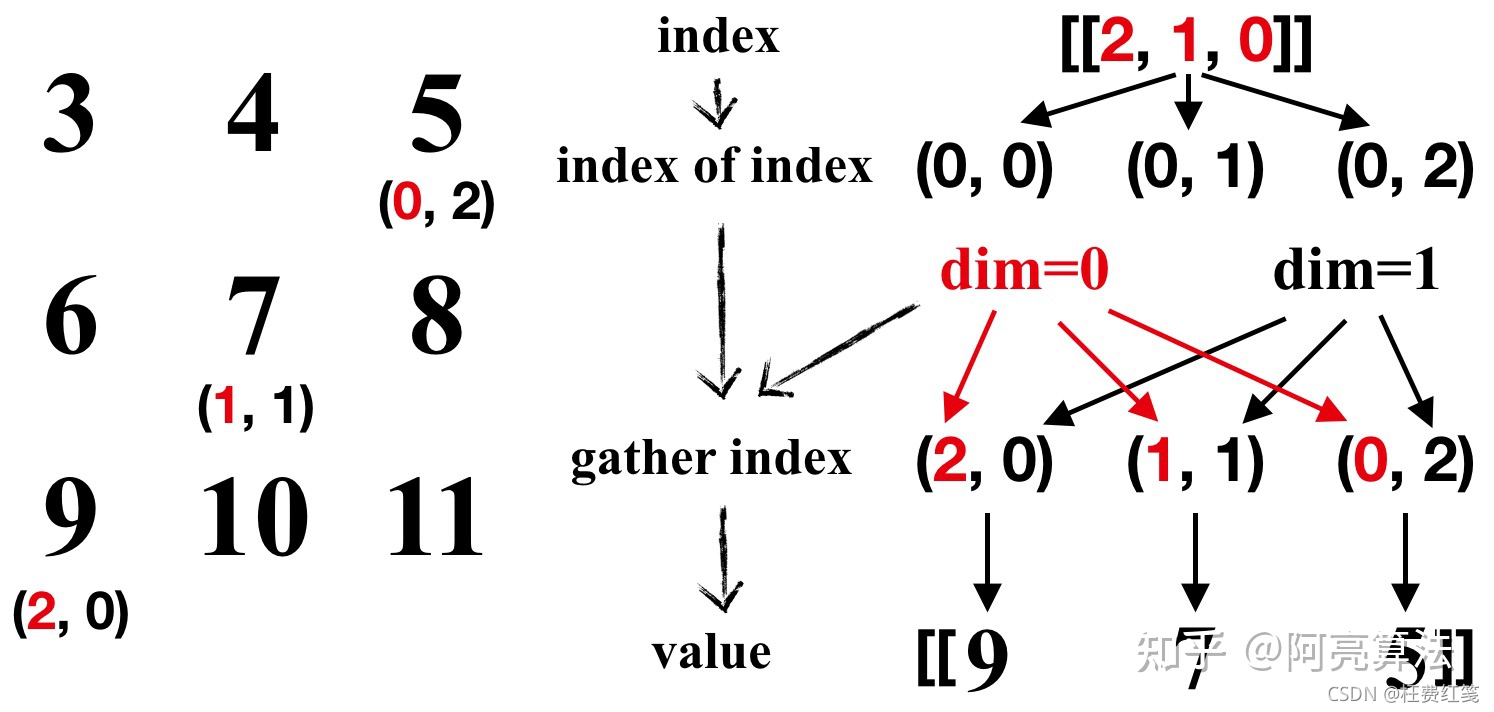
2.1 输入行向量index,并替换行索引(dim=0)
index = torch.tensor([[2, 1, 0]])
tensor_1 = tensor_0.gather(0, index)
print(tensor_1)
输出结果
tensor([[9, 7, 5]])
过程如图所示
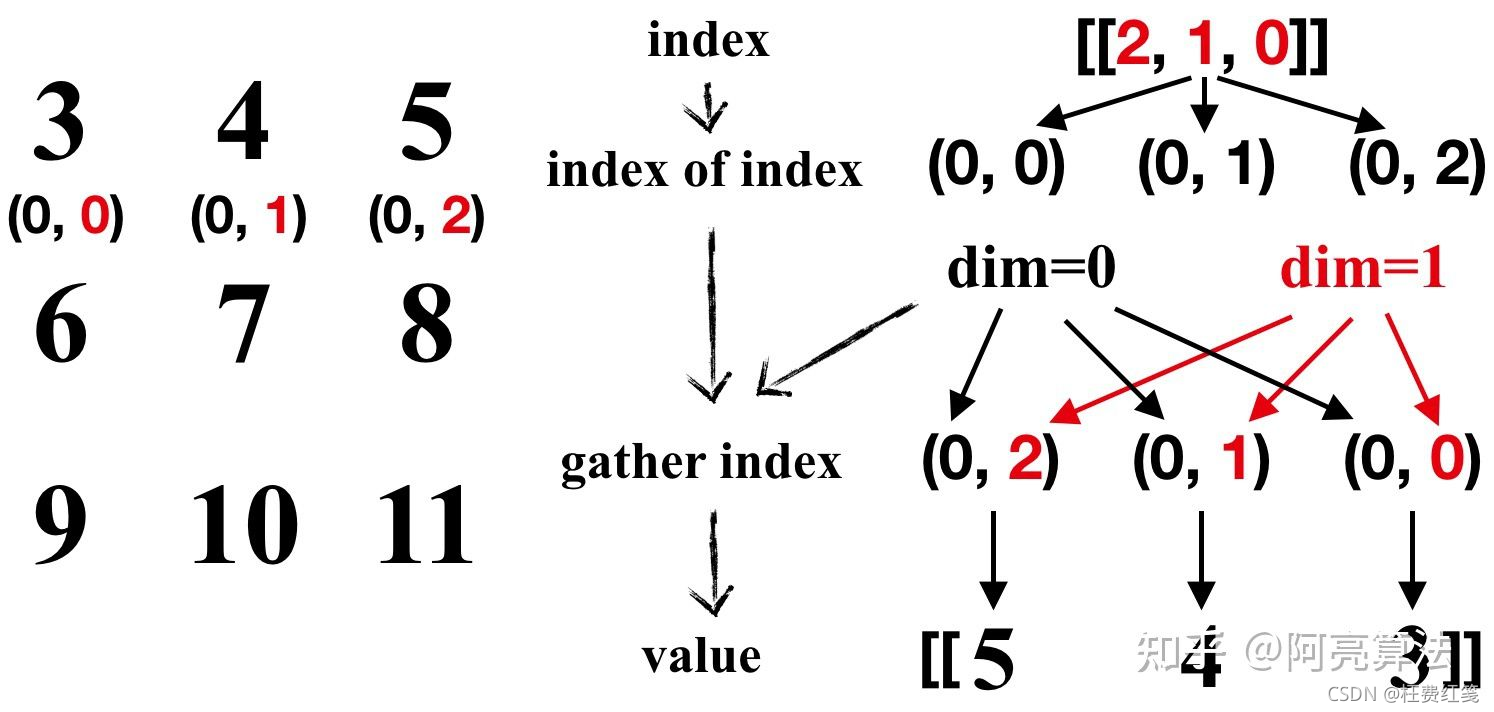
2.2 输入行向量index,并替换列索引(dim=1)
index = torch.tensor([[2, 1, 0]])
tensor_1 = tensor_0.gather(1, index)
print(tensor_1)
输出结果
tensor([[5, 4, 3]])
过程如图所示
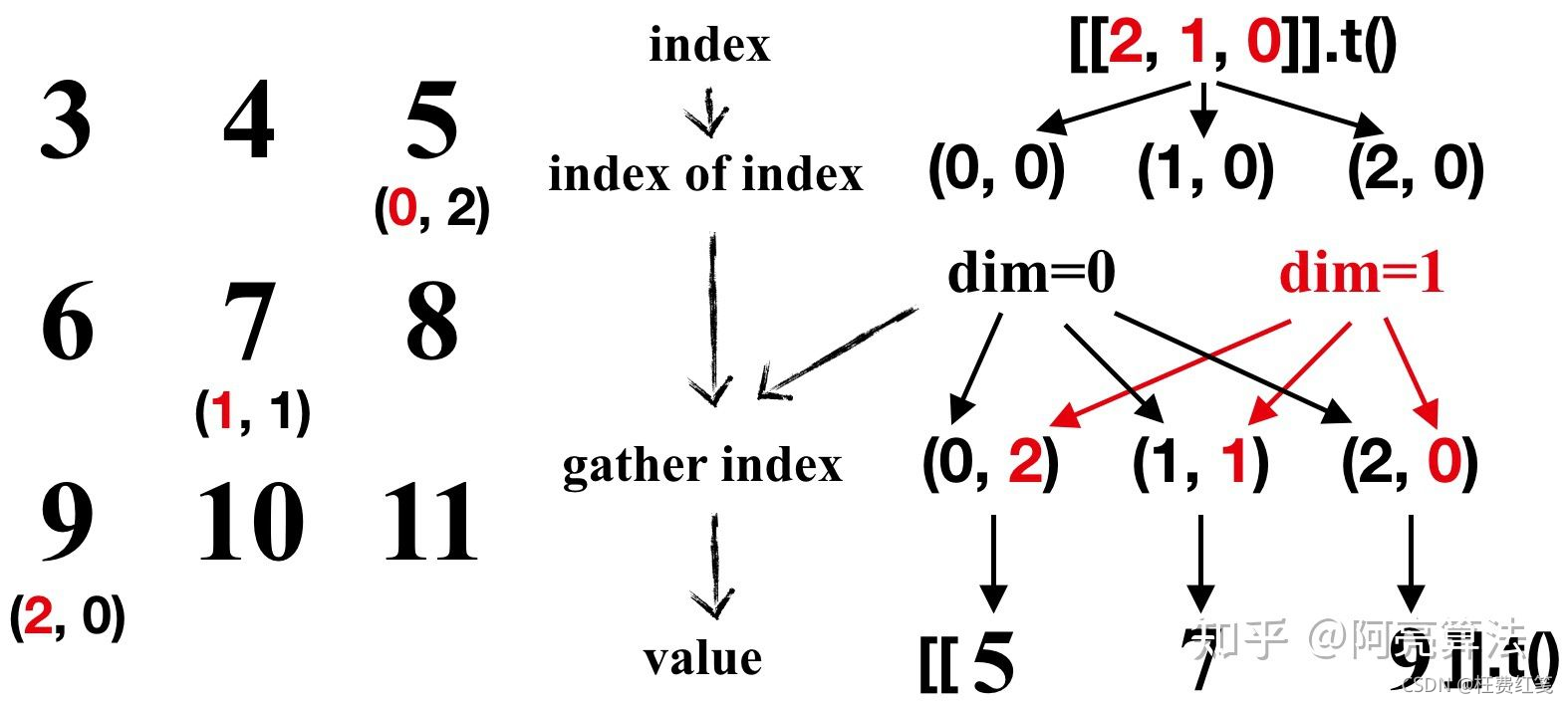
2.3 输入列向量index,并替换列索引(dim=1)
index = torch.tensor([[2, 1, 0]]).t()
tensor_1 = tensor_0.gather(1, index)
print(tensor_1)
输出结果
tensor([[5],
[7],
[9]])
过程如图所示
2.4 输入二维矩阵index,并替换列索引(dim=1)
index = torch.tensor([[0, 2],
[1, 2]])
tensor_1 = tensor_0.gather(1, index)
print(tensor_1)
输出结果
tensor([[3, 5],
[7, 8]])
过程同上
注意计算过程中行号的变化
3 在强化学习DQN中的使用
在PyTorch官网DQN页面的代码中,是这样获取 Q ( S t , a ) Q(S_t,a) Q(St,a)的
# Compute Q(s_t, a) - the model computes Q(s_t), then we select the
# columns of actions taken. These are the actions which would've been taken
# for each batch state according to policy_net
state_action_values = policy_net(state_batch).gather(1, action_batch)
其中
Q
(
S
t
)
Q(S_t)
Q(St),即policy_net(state_batch)为shape=(128, 2)的二维表,动作数为2
而我们通过神经网络输出的对应批量动作为
Q
(
S
t
,
a
)
Q(S_t,a)
Q(St,a)
此时,使用gather()函数即可轻松获取批量状态对应批量动作的
Q
(
S
t
,
a
)
Q(S_t,a)
Q(St,a)
3 总结
从以上典型案例,我们可以归纳出torch.gather()的使用要点
- 输入index的shape等于输出value的shape
- 输入index的索引值仅替换该index中对应dim的index值
- 最终输出为替换index后在原tensor中的值
本文转载自知乎,原文网址: 图解PyTorch中的torch.gather函数















 885
885











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









