







文章结尾有移植好的工程文件可以直接下载
- 红外循迹传感器
红外循迹传感器采用TCRT5000红外反射传感器,一种集发射与接收于一体的光电传感器,它由一个红外发光二极管和一个NPN红外光电三极管组成。检测反射距离1mm-25mm适用,传感器特设M3固定安装孔,调节方向与固定方便易用,使用宽电压LM393比较器,信号干净,波形好,驱动能力强,超过15mA。可以应用于机器人避障、机器人进行白线或者黑线的跟踪,可以检测白底中的黑线,也可以检测黑底中的白线,是寻线机器人的必备传感器。
6.1 模块来源
采购链接:
资料下载链接:
6.2 规格参数
工作电压:3.3V-5V
检测反射距离:1mm~25mm适用
输出方式: DO接口为数字量输出;AO接口为模拟量输出
读取方式:ADC
管脚数量:4 Pin(2.54mm间距排针)
检测反射距离:1mm~25mm适用
输出方式: DO接口为数字量输出;AO接口为模拟量输出
读取方式:ADC
管脚数量:4 Pin(2.54mm间距排针)
6.3 移植过程
我们的目标是在天空星STM32F407上能够实现检测黑线的功能。首先要获取资料,查看数据手册应如何实现,再移植至我们的工程。
6.3.1 查看资料
TCRT5000 传感器的红外发射二极管不断发射红外线,当发射出的红外线没有被反射回来或被反射回来但强度不够大时,红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态;被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和,此时模块的输出端为低电平,指示二极管被点亮。
其对应的原理图见图2.6.3.1-2,AO输出为红外循迹传感器直接输出的电压,所以为模拟量;DO为经过LM393进行电压比较后,输出高低电平,所以为数字量。
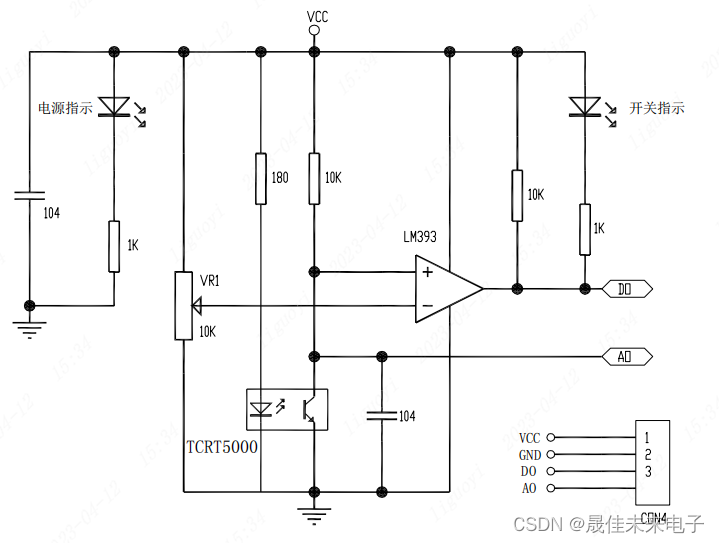
因此DO引脚可以配置为GPIO的输入模式,AO引脚需要配置为ADC模拟输入模式。
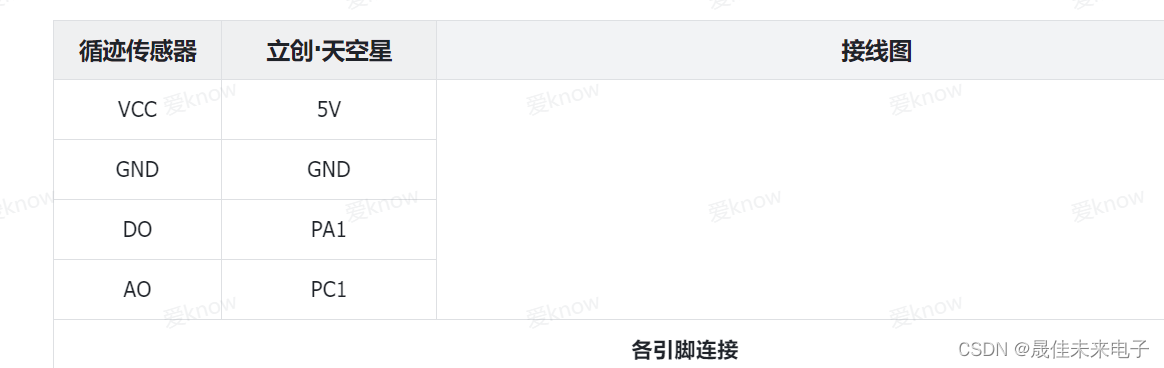
6.3.2 引脚选择
想要使用ADC,需要确定使用的引脚是否有ADC外设功能。可以通过数据手册进行查看。
在数据手册的第47页,是关于STM32F4xx系列芯片引脚的功能定义示意图。
当前只有AO引脚需要使用到ADC接口,所以DO引脚可以使用开发板上其他的GPIO。这里选择使用PC1的附加ADC功能。
6.3.3 移植至工程
移植步骤中的导入.c和.h文件与第二章的第1小节【DHT11温湿度传感器】相同,只是将.c和.h文件更改为bsp_IRtracking.c与bsp_IRtracking.h。这里不再过多讲述,移植完成后面修改相关代码。
在文件bsp_IRtracking.c中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 立创论坛:https://oshwhub.com/forum
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*
Change Logs:
* Date Author Notes
* 2024-03-18 LCKFB-LP first version
*/
#include "bsp_IRtracking.h"
#include "board.h"
#include "stdio.h"
/******************************************************************
* 函 数 名 称:IRtracking_GPIO_Init
* 函 数 说 明:红外循迹模块引脚初始化
* 函 数 形 参:无
* 函 数 返 回:无
* 作 者:LC
* 备 注:AO引脚必须有ADC功能
******************************************************************/
void IRtracking_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
ADC_CommonInitTypeDef ADC_CommonInitStruct;
ADC_InitTypeDef ADC_InitStruct;
RCC_AHB1PeriphClockCmd (RCC_IR_AO, ENABLE); // 开启GPIO时钟
RCC_AHB1PeriphClockCmd (RCC_IR_DO, ENABLE);
RCC_APB2PeriphClockCmd(RCC_IR_ADC, ENABLE); // 开启ADC1时钟
// AO初始化
GPIO_InitStructure.GPIO_Pin = GPIO_IR_AO;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AN;//模拟输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(PORT_IR_AO, &GPIO_InitStructure);
// DO初始化
GPIO_InitStructure.GPIO_Pin = GPIO_IR_DO;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//输入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(PORT_IR_DO, &GPIO_InitStructure);
ADC_DeInit();//ADC复位
ADC_CommonInitStruct.ADC_DMAAccessMode=ADC_DMAAccessMode_Disabled;
ADC_CommonInitStruct.ADC_Mode=ADC_Mode_Independent;
ADC_CommonInitStruct.ADC_Prescaler=ADC_Prescaler_Div4;
ADC_CommonInitStruct.ADC_TwoSamplingDelay=ADC_TwoSamplingDelay_5Cycles;
ADC_CommonInit(&ADC_CommonInitStruct);
ADC_InitStruct.ADC_ContinuousConvMode = DISABLE;
ADC_InitStruct.ADC_DataAlign=ADC_DataAlign_Right;
ADC_InitStruct.ADC_ExternalTrigConvEdge=ADC_ExternalTrigConvEdge_None;
ADC_InitStruct.ADC_NbrOfConversion=1;
ADC_InitStruct.ADC_Resolution=ADC_Resolution_12b;
ADC_InitStruct.ADC_ScanConvMode = DISABLE;
ADC_Init(PORT_IR_ADC, &ADC_InitStruct);
ADC_Cmd(PORT_IR_ADC, ENABLE);
}
/******************************************************************
* 函 数 名 称:Get_ADC_Value
* 函 数 说 明:对ADC值进行平均值计算后输出
* 函 数 形 参:
* 函 数 返 回:对应扫描的ADC值
* 作 者:LC
* 备 注:无
******************************************************************/
unsigned int Get_ADC_Value(void)
{
unsigned char i = 0;
unsigned int AdcValue = 0;
ADC_RegularChannelConfig(PORT_IR_ADC, CHANNEL_IR_ADC, 1, ADC_SampleTime_480Cycles );
ADC_SoftwareStartConv(PORT_IR_ADC);
/* 因为采集 SAMPLES 次,故循环 SAMPLES 次 */
for(i=0; i< SAMPLES; i++)
{
/* 累加 */
AdcValue += ADC_GetConversionValue(PORT_IR_ADC);
}
/* 求平均值 */
AdcValue = AdcValue / SAMPLES;
return AdcValue;
}
/******************************************************************
* 函 数 名 称:Get_DO_Num
* 函 数 说 明:读取传感器识别状态
* 函 数 形 参:无
* 函 数 返 回:1=识别为黑色 0=识别的不是黑色
* 作 者:LC
* 备 注:可以通过模块上的可调电阻调整识别黑色的阈值
******************************************************************/
unsigned char Get_DO_Num(void)
{
if( IR_DO == 0 )//识别为黑色
{
return 0;
}
else//识别的不是黑色
{
return 1;
}
}
在文件bsp_IRtracking.h中,编写如下代码。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 立创论坛:https://oshwhub.com/forum
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*
Change Logs:
* Date Author Notes
* 2024-03-18 LCKFB-LP first version
*/
#ifndef _BSP_IRTRACKING_H_
#define _BSP_IRTRACKING_H_
#include "stm32f4xx.h"
#define RCC_IR_ADC RCC_APB2Periph_ADC1
#define RCC_IR_DO RCC_AHB1Periph_GPIOA
#define RCC_IR_AO RCC_AHB1Periph_GPIOC
#define PORT_IR_AO GPIOC
#define GPIO_IR_AO GPIO_Pin_1
#define PORT_IR_DO GPIOA
#define GPIO_IR_DO GPIO_Pin_1
#define PORT_IR_ADC ADC1
#define CHANNEL_IR_ADC ADC_Channel_11
#define IR_DO GPIO_ReadInputDataBit( PORT_IR_DO, GPIO_IR_DO )
//采样次数
#define SAMPLES 30
void IRtracking_GPIO_Init(void);//初始化
unsigned int Get_ADC_Value(void);//读取AO值
unsigned char Get_DO_Num(void);//读取DO值
#endif
6.4 移植验证
在自己工程中的main主函数中,编写如下。
/*
* 立创开发板软硬件资料与相关扩展板软硬件资料官网全部开源
* 开发板官网:www.lckfb.com
* 技术支持常驻论坛,任何技术问题欢迎随时交流学习
* 立创论坛:https://oshwhub.com/forum
* 关注bilibili账号:【立创开发板】,掌握我们的最新动态!
* 不靠卖板赚钱,以培养中国工程师为己任
*
Change Logs:
* Date Author Notes
* 2024-03-18 LCKFB-LP first version
*/
#include "board.h"
#include "bsp_uart.h"
#include <stdio.h>
#include "bsp_IRtracking.h"
int main(void)
{
board_init();
uart1_init(115200U);
IRtracking_GPIO_Init();
printf("IRtracking demo start\r\n");
while(1)
{
printf("AO = %d\r\n", Get_ADC_Value() );
printf("DO = %d\r\n",Get_DO_Num() );
delay_ms(1000);
}
}
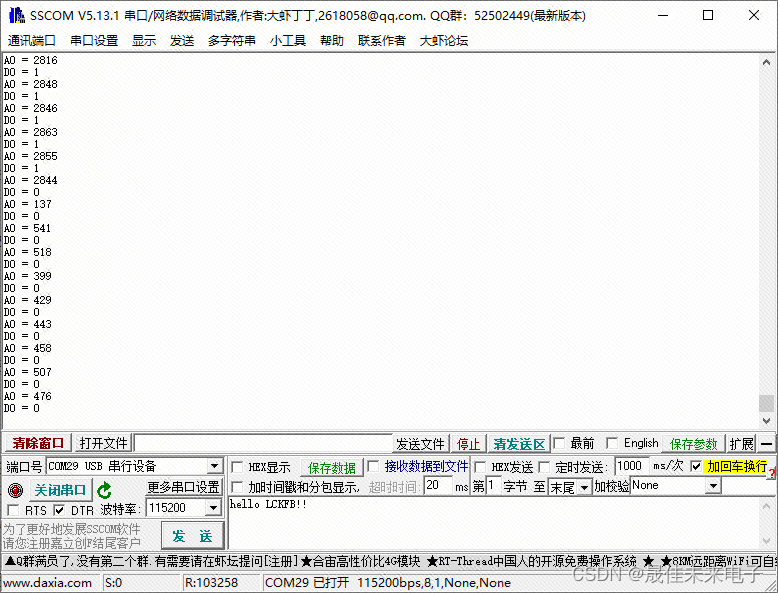
移植现象:输出AO值和DO值(ADC值小为识别到黑色)。
















 4286
4286











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











