






引言:之前写了一篇关于两轮差速移动机器人位置误差状态方程推导,最近在读履带式移动机器人轨迹跟踪的文献,发现还是有区别的,特此记录一下。
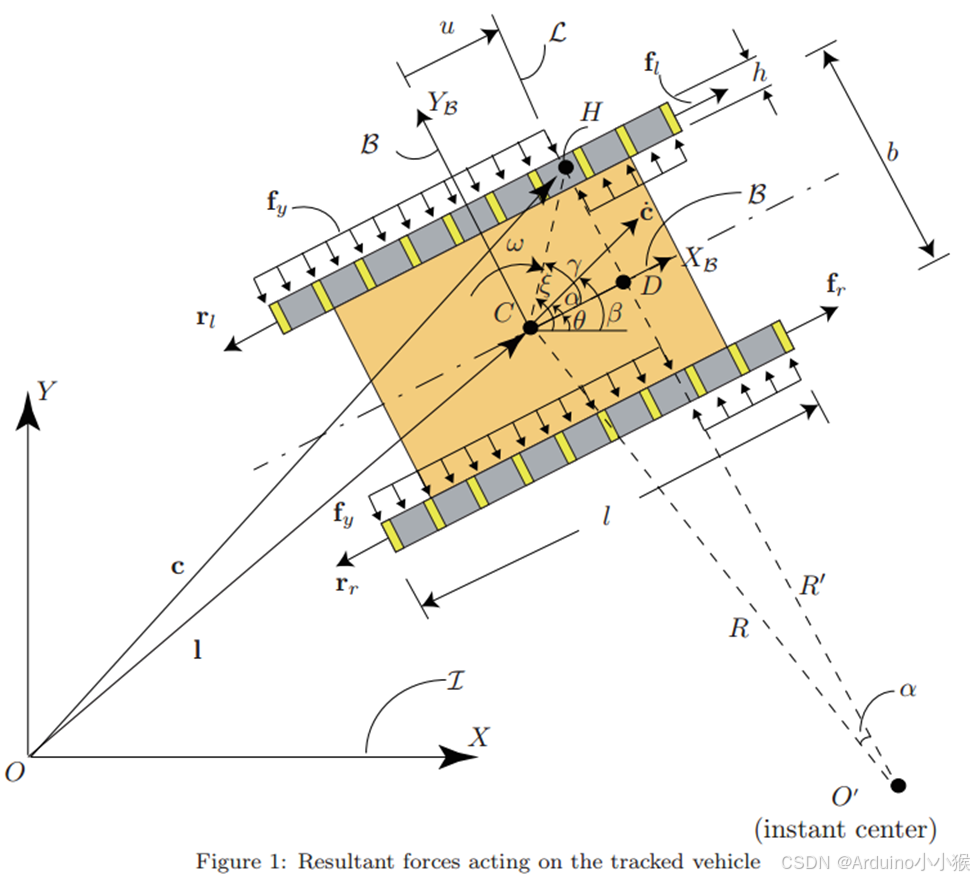
图 履带式移动机器人动力学建模[1]
由于履带存在滑移转向,α为滑移角,导致转向中心和质心的连线不再沿y轴,而是沿x轴进行了偏移,偏移角度也就是α,接下来介绍一下跟踪误差如何表达。
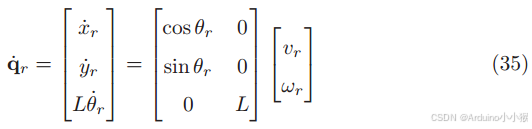
(35)式表示期望轨迹,全文都是用Lθ来代替θ,理由是为了让矩阵的单位一致。

(36)式就是误差方程,将I坐标系中的误差通过旋转矩阵R转换到B坐标系中,对误差求导:

这里我把之前两轮差速的误差矩阵搬过来进行对比:
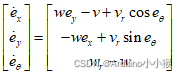
可以发现差异就在(37)式中多了α变量,进过思考,其实就是两轮的时候x的导数是vcosθ,现在履带式中x的导数应该是vcosβ,感兴趣的可以认真推一边,我这里就先写到这。
参考文献:
[1]Zou T, Angeles J, Hassani F. Dynamic modeling and trajectory tracking control of unmanned tracked vehicles[J]. Robotics and Autonomous Systems, 2018, 110: 102-111.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









