






1 简介
1.1 Linux常用目录
目录 目录说明
/dev 设备文件
/etc 系统配置文件,不包含可执行文件
/home 用户目录
/mnt 本地安装
/opt 应用程序
/sbin 启动系统和安装其他文件系统时需要的必要命令。
/tmp 操作系统临时文件
/usr 共享的操作系统命令、库文件和文档
/var 动态信息,如日志、缓冲区文件
1.2 卷管理软件
Linux卷管理软件LVM是在物理存储上添加的一个逻辑层,来为文件系统屏蔽下面的硬件存储设备,提供了一个抽象的盘卷,在盘卷上建立文件系统。
物理存储介质(The Physical Media)
这里指系统的存储设备,如:/dev/hda1、/dev/sda等等,是存储系统最低层的存储单元。
物理卷(PV, Physical Volume)
物理卷就是指磁盘、磁盘分区或从逻辑上和磁盘分区具有同样功能的设备(如RAID),是LVM的基本存储逻辑块,但和基本的物理存储介质(如分区、磁盘等)比较,却包含有和LVM相关的管理参数。当前LVM允许你在每个物理卷上保存这个物理卷的0至2份元数据拷贝。默认为1,保存在设备的开始处。为2时,在设备结束处保存第二份备份。
卷组(VG, Volume Group)
LVM卷组类似于非LVM系统中的物理硬盘,其由物理卷组成。能在卷组上创建一个或多个“LVM分区”(逻辑卷),LVM卷组由一个或多个物理卷组成。
逻辑卷(LV, Logical Volume)
LVM的逻辑卷类似于非LVM系统中的硬盘分区,在逻辑卷之上能建立文件系统(比如/home或/usr等)。
线性逻辑卷 (Linear Volumes)
一个线性逻辑卷聚合多个物理卷成为一个逻辑卷。比如,如果你有两个60GB硬盘,你能生成120GB的逻辑卷。
条块化的逻辑卷(Striped Logical Volumes)
当你写数据到此逻辑卷中时,文件系统能将数据放置到多个物理卷中。对于大量连接读写操作,他能改善数据I/O效率。
映像的逻辑卷(Mirrored Logical Volumes)
映像在不同的设备上保存一致的数据。数据同时被写入原设备及映像设备。他提供设备之间的容错。
快照卷(Snapshot Volumes)
快照卷提供在特定瞬间的一个设备虚拟映像,当快照开始时,他复制一份对当前数据区域的改动,由于他优先执行这些改动,所以他能重构当前设备的状态。
PE(physical extent)
每一个物理卷被划分为称为PE(Physical Extents)的基本单元,具有唯一编号的PE是能被LVM寻址的最小单元。PE的大小是可设置的,默认为4MB。
LE(logical extent)
逻辑卷也被划分为被称为LE(Logical Extents) 的可被寻址的基本单位。在同一个卷组中,LE的大小和PE是相同的,并且一一对应。
和非LVM系统将包含分区信息的元数据保存在位于分区的起始位置的分区表中相同,逻辑卷及卷组相关的元数据也是保存在位于物理卷起始处的VGDA(卷组描述符区域)中。VGDA包括以下内容: PV描述符、VG描述符、LV描述符、和一些PE描述符 。系统启动LVM时激活VG,并将VGDA加载至内存,来识别LV的实际物理存储位置。当系统进行I/O操作时,就会根据VGDA建立的映射机制来访问实际的物理位置。
1.3 本地文件系统
• Ext4(The fourth extended file system)
Ext4 是一种针对ext3 系统的扩展日志式文件系统,是专门为 Linux 开发的原始的扩展文件系统(ext 或 extfs)的第四版。Linux kernel 自2.6.28 开始正式支持新的文件系统 Ext4。Ext4 是Ext3 的改进版,修改了Ext3 中部分重要的数据结构,而不仅仅像Ext3 对Ext2 那样,只是增加了一个日志功能而已,Ext4 最大可以1EB 的文件系统和16TB 的文件。
• Ext3(The Third extended file system)
Ext3 是由开放资源社区开发的日志文件系统,是一种日志式文件系统,支持多种日志模式,具有高可用性的特点,是对ext2 系统的扩展,它兼容ext2,最大可支持16TB 的文件系统和2TB 的文件。
• Ext2(The Second Extended File System)
Ext2 文件系统是Linux 系统中的标准文件系统,是通过对Minix 的文件系统进行扩展而得来的,其特点为存取文件的性能极好,对于中小型的文件更显示出优势,在Ext3 发布后,逐步被Ext3 取代。
2 Linux系统信息查询
2.1 系统物理配置信息:dmidecode -q
使用命令:dmidecode -q 收集,主要显示获取有关硬件方面的信息。

2.2 操作系统版本信息
使用命令:uname -a、cat /etc/*-release收集,回显如下:
2.3 主机IP地址信息:ifconfig
使用命令:ifconfig 查看系统的IP地址信息。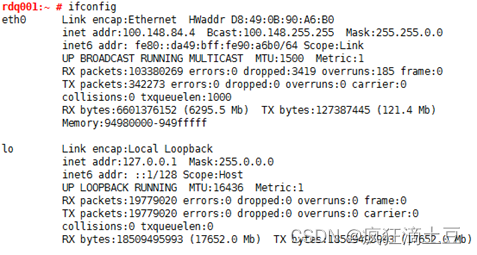
上图中,系统有一个接口eth0,IPv4地址为100.148.84.4。
2.4 主机名称:hostname
使用命令:hostname 查看主机名称。
2.5 FC-HBA卡信息
注意:由于Linux系统类型较多,不同类型的OS查看命令可能不一致,查看方法一般使用HBA厂商提供的管理软件,具体使用请参照各厂商的配置指导。
2.5.1 识别HBA卡
使用命令:lspci|grep Fibre 查看已经安装并且识别的HBA卡。

2.5.2 查看启动器信息:ls /sys/class/fc_host/
使用命令:ls /sys/class/fc_host/ 查看启动器信息。 记录回显信息,作为,后续hostid也可使用host*代替。

上图中,启动器即hostid为host1与host8。
2.5.3 查看HBA卡型号:cat /sys/class/fc_host//node_name
使用命令:cat /sys/class/fc_host//node_name 查看HBA卡类型。或者cat /sys/class/fc_host/*/node_name
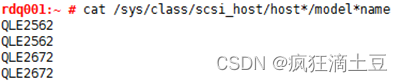
上图中,HBA卡的类型Qlogic2562及2672。
2.5.4 启动器信息:cat /sys/class/fc_host//port_name
使用命令:cat /sys/class/fc_host//port_name 查看具体启动器的wwpn信息,使用cat /sys/class/fc_host/host*/port_name查看所有启动器的wwpn信息。

2.5.5 端口状态:cat /sys/class/fc_host//port_state
使用命令:cat /sys/class/fc_host//port_state 查看端口状态信息。
图中前两个端口的状态是Online,可以使用,后两个端口是Linkdown,线缆未连接状态。

2.5.6 超时参数配置信息: cat /sys/class/fc_host//dev_loss_tmo
使用命令:cat /sys/class/fc_host//dev_loss_tmo 命令显示超时参数。
图中,HBA卡的超时参数是30秒

2.5.7 目标器信息: ls /sys/class/fc_transport/
使用命令:ls /sys/class/fc_transport/ 查看目标器信息,使用命令:cat /sys/class/fc_transport/targetid/port_name 查看目标器的WWPN信息。也可以使用命令:cat /sys/class/fc_transport/*/port_name 查看所有目标器信息。

2.5.8 HBA卡驱动信息
先使用命令:lsmod |grep ^“scsi_transport_fc” 查询HBA卡件硬件属性,再使用命令:modinfo *** | grep -i version显示驱动信息。
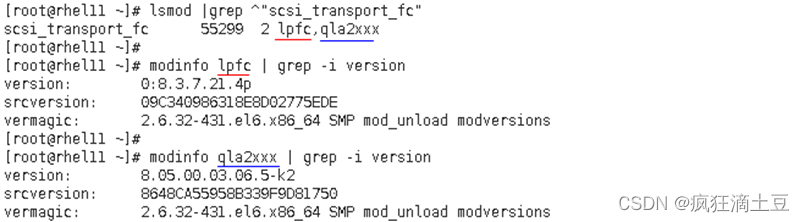
或者使用命令cat /sys/class/fc_host/host*/symbolic_name直接收集,回显如下:

2.6 iSCSI场景
2.6.1 网卡卡类型: lspci|grep Eth
使用命令:lspci|grep Eth 查看已经安装并且识别的HBA卡。

上图中,有一张4端口的82580的intel 千兆网卡,和一张85299的intel 10Ge网卡。
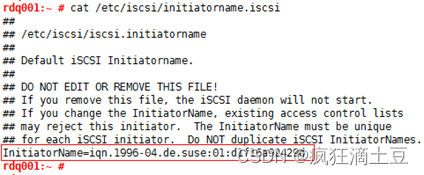
2.6.2 启动器信息: cat /etc/iscsi/initiatorname.iscsi
使用命令:cat /etc/iscsi/initiatorname.iscsi 显示iSCSI启动器信息。
图中iqn.1996-04.de.suse:01:d1f16a92429d为主机iSCSI的启动器。
2.6.3 iSCSI目标器信息: iscsiadm -m node
使用命令:iscsiadm -m session - i 或 iscsiadm -m node 显示目标器信息。
图中,主机的目标器信息为:192.0.68.45:3260,8199 iqn.2006-08.com.huawei:oceanstor:210048435a57bd35::22006:192.0.68.45为目标器信息,与存储上的iqn信息对应。
2.6.4 iSCSI超时参数: iscsiadm -m node -p targetip | grep replacement_timeout
使用命令:iscsiadm -m node 查看iSCSI的业务IP地址,使用命令:iscsiadm -m node -p targetip | grep replacement_timeout 查看iSCIS的超时参数。
图中,iSCSI的业务IP地址是192.0.68.45,iSCSI超时时间是120秒。

2.7 系统原生多路径信息
2.7.1 版本信息: rpm -qa | grep multipath
使用命令:rpm -qa | grep multipath 显示多路径的版本信息。

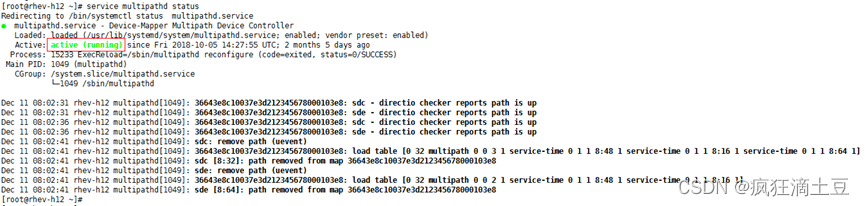
2.7.2 多路径状态信息: service multipathd status
使用命令:service multipathd status 查询多路径的状态信息。
图中,多路径状态为激活。
2.7.3 物理路径信息: multipath -v3
使用命令:multipath -v3 查看路径的详细信息。当多路径无法正常显示的时候,可以通过该命令来检查调试。
2.7.4 多路径聚合盘符信息: multipath -ll
使用命令:multipath -ll 显示磁盘路径及状态信息。
图中, wwn为648435a1007751502a3765eb0000001e的磁盘,聚合后磁盘的名称是mpathf,来自华为存储,磁盘大小40GB,多路径策略为round-robin,状态为active,有2条路径,其中一条路径为激活状态。
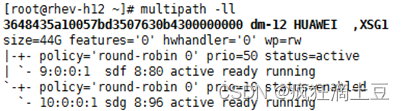
图中,wwn为648435a10057bd3507630b4300000000的LUN开启了alua(状态值包含status=active和status=enabled,且Active和enable的路径对应的prio(优先级)不同),多路径策略为round-robin。
2.7.5 多路径配置策略信息: cat /etc/multipath.conf
使用命令:cat /etc/multipath.conf 多路径配置文件信息。
下图中系统的多路径策略信息为默认。
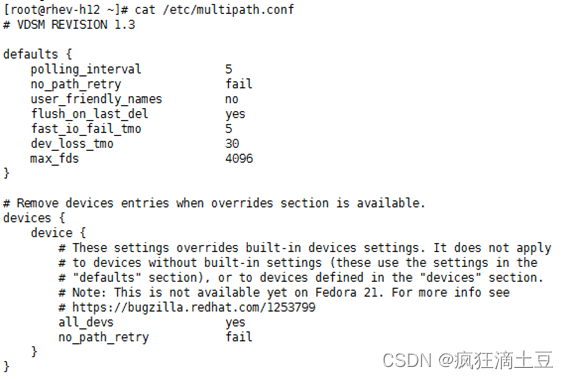
下图中开启alua配置,多路径策略为round-robin方式。注意,vendor信息必须是8位,否则多路径配置不能生效且会提示错误信息。

2.8 华为多路径信息
2.8.1 版本信息: upadm show version
多路径使用:upadm show version或者upadmin show version 显示版本信息。
图中华为多路径的版本为21.02.048。

2.8.2 物理路径信息: upadmin show path
使用命令:upadmin show path 显示多路径及状态信息。

图中,存储iSCSI有2条路径,FC有4条路径。路径信息中会显示主机启动器,存储目标器、路径状态、端口类型等信息。
2.8.3 多路径聚合盘符信息: upadmin show vlun type=all
使用命令:upadmin show vlun type=all 显示华为存储lun信息。

图中,映射的LUN有1个,裸盘名称为sdb,存储上LUN的名称ESS_Data_0000,LUN的状态为Normal,容量为50GB。
2.8.4 多路径配置策略信息: upadmin show upconfig
使用命令:upadmin show upconfig 显示系统的多路径配置信息,使用命令:upadmin show upconfig vlun_id=显示某一个LUN的多路径配置信息。
 图中,多路径策略为使用最小队列深度的控制器间负载均衡模式。
图中,多路径策略为使用最小队列深度的控制器间负载均衡模式。
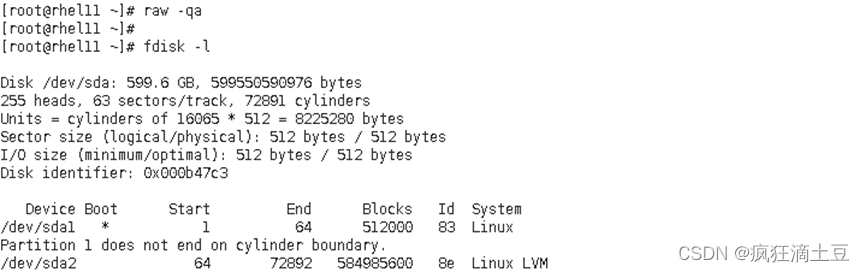
2.9 磁盘配置信息:fdisk -l
使用命令:raw -qa、fdisk -l 显示磁盘配置信息。
2.10 卷及文件系统信息
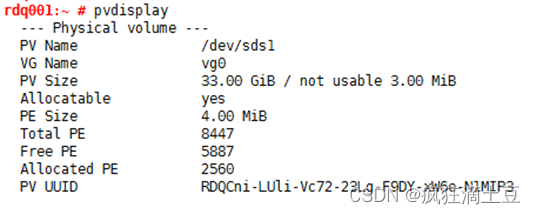
2.10.1 物理卷PV信息:pvdisplay
使用命令:pvdisplay 显示创建的所有pv信息。
图中,pv的名称为/dev/sds1,其属于vg0,pv的大小为33GB,容量已经分配。
2.10.2 物理卷组VG信息: vgdisplay
使用命令:vgdisplay 显示创建的所有vg信息。使用命令:vgdisplay -v vg0命令或者vgdisplay -v 可以查看vg的详细信息,包括vg下PV的信息及LV信息。
图中,vg的名称为vg0,当前创建了一个lv(Cur Lv),当前的pv只有一个(Cur PV),vg的大小为30GB。

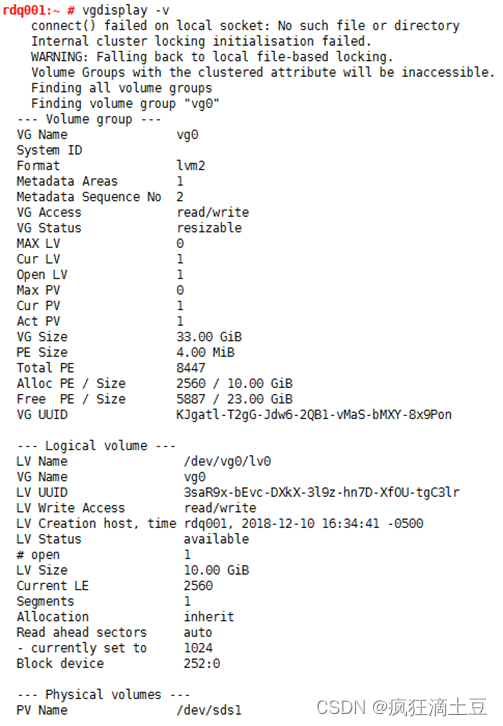
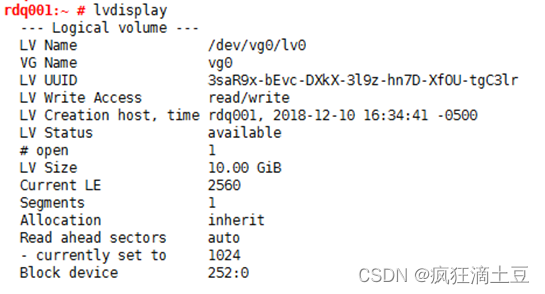
2.10.3 逻辑卷LV信息: lvdisplay
使用命令:lvdisplay 显示创建的所有lv信息。
图中,逻辑卷名称/dev/vg0/lv0 ,创建在名为vg0的vg上,lv的状态为available,大小为10GB。
2.10.4 本地文件系统信息: df -TH
使用命令:df -h 或者df -TH 显示所有的文件系统及容量信息。使用命令:mount 查看文件系统的配置信息。
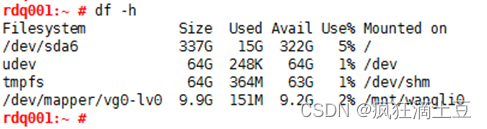

上图中,文件系统/dev/mapper/vg0-lv0容量为9.9GB,使用了151MB,挂载路径是/mnt/wangli0。
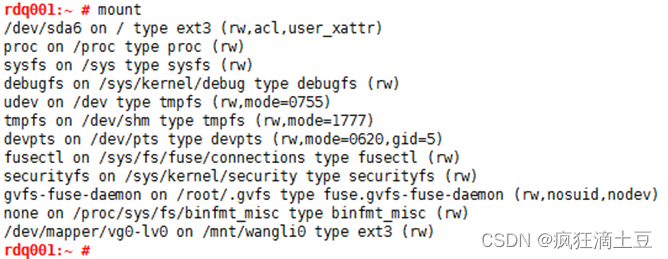
上图中/mnt/wangli0文件系统类型为ext3,可读写。
2.11 系统日志信息
使用命令:cat /var/log/messages查看系统日志,必要时下载该日志文件。
















 931
931











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









