







单片机有什么功能,看完一定有收获
对于绝大多数MCU,下列功能是最普遍也是最基本的,针对不同的MCU,其描述的方式可能会有区别,但本质上是基本相同的:
TImer(定时器):TImer的种类虽然比较多,但可归纳为两大类:一类是固定时间间隔的TImer,即其定时的时间是由系统设定的,用户程序不可控制,系统只提供几种固定的时间间隔给用户程序进行选择,如32Hz,16Hz,8Hz等,此类TImer在4位MCU中比较常见,因此可以用来实现时钟、计时等相关的功能。
另一类则是Programmable Timer(可编程定时器),顾名思义,该类Timer的定时时间是可以由用户的程序来控制的,控制的方式包括:时钟源的选择、分频数(Prescale)选择及预制数的设定等,有的MCU三者都同时具备,而有的则可能是其中的一种或两种。此类Timer应用非常灵活,实际的使用也千变万化,其中最常见的一种应用就是用其实现PWM输出。
由于时钟源可以自由选择,因此,此类Timer一般均与Event Counter(事件计数器)合在一起。
IO口:任何MCU都具有一定数量的IO口,没有IO口,MCU就失去了与外部沟通的渠道。根据IO口的可配置情况,可以分为如下几种类型:
纯输入或纯输出口:此类IO口有MCU硬件设计决定,只能是输入或输出,不可用软件来进行实时的设定。
直接读写IO口:如MCS-51的IO口就属于此类IO口。当执行读IO口指令时,就是输入口;当执行写IO口指令则自动为输出口。
程序编程设定输入输出方向的:此类IO口的输入或输出由程序根据实际的需要来进行设定,应用比较灵活,可以实现一些总线级的应用,如I2C总线,各种LCD、LED Driver的控制总线等。
对于IO口的使用,重要的一点必须牢记的是:对于输入口,必须有明确的电平信号,确保不能浮空(可以通过增加上拉或下拉电阻来实现);而对于输出口,其输出的状态电平必须考虑其外部的连接情况,应保证在Standby或静态状态下不存在拉电流或灌电流。
外部中断:外部中断也是绝大多数MCU所具有的基本功能,一般用于信号的实时触发,数据采样和状态的检测,中断的方式由上升沿、下降沿触发和电平触发几种。外部中断一般通过输入口来实现,若为IO口,则只有设为输入时其中断功能才会开启;若为输出口,则外部中断功能将自动关闭(ATMEL的ATiny系列存在一些例外,输出口时也能触发中断功能)。外部中断的应用如下:
外部触发信号的检测:一种是基于实时性的要求,比如可控硅的控制,突发性信号的检测等,而另一种情况则是省电的需要。
信号频率的测量,为了保证信号不被遗漏,外部中断是最理想的选择。
数据的解码:在遥控应用领域,为了降低设计的成本,经常需要采用软件的方式来对各种编码数据进行解码,如Manchester和PWM编码的解码。
按键的检测和系统的唤醒:对于进入Sleep状态的MCU,一般需要通过外部中断来进行唤醒,最基本的形式则是按键,通过按键的动作来产生电平的变化。
通讯接口:MCU所提供的通讯接口一般包括SPI接口,UART,I2C接口等,其分别描述如下:
SPI接口:此类接口是绝大多数MCU都提供的一种最基本通讯方式,其数据传输采用同步时钟来控制,信号包括:SDI(串行数据输入)、SDO(串行数据输出)、SCLK(串行时钟)及Ready信号;有些情况下则可能没有Ready信号;此类接口可以工作在Master方式或Slave方式下,通俗说法就是看谁提供时钟信号,提供时钟的一方为Master,相反的一方则为Slaver。
UART(Universal Asynchronous Receive Transmit):属于最基本的一种异步传输接口,其信号线只有Rx和Tx两条,基本的数据格式为:Start Bit + Data Bit(7-bits/8-bits) + Parity Bit(Even, Odd or None) + Stop Bit(1~2Bit)。一位数据所占的时间称为Baud Rate(波特率)。
对于大多数的MCU来讲,数据为的长度、数据校验方式(奇校验、偶校验或无校验)、停止位(Stop Bit)的长度及Baud Rate是可以通过程序编程进行灵活设定。此类接口最常用的方式就是与PC机的串口进行数据通讯。
I2C接口:I2C是由Philips开发的一种数据传输协议,同样采用2根信号来实现:SDAT(串行数据输入输出)和SCLK(串行时钟)。其最大的好处是可以在此总线上挂接多个设备,通过地址来进行识别和访问;I2C总线的一个最大的好处就是非常方便用软件通过IO口来实现,其传输的数据速率完全由SCLK来控制,可快可慢,不像UART接口,有严格的速率要求。
Watchdog(看门狗定时器):Watchdog也是绝大多数MCU的一种基本配置(一些4位MCU可能没有此功能),大多数的MCU的Watchdog只能允许程序对其进行复位而不能对其关闭(有的是在程序烧入时来设定的,如Microchip PIC系列MCU),而有的MCU则是通过特定的方式来决定其是否打开,如Samsung的KS57系列,只要程序访问了Watchdog寄存器,就自动开启且不能再被关闭。一般而言watchdog的复位时间是可以程序来设定的。Watchdog的最基本的应用是为MCU因为意外的故障而导致死机提供了一种自我恢复的能力。
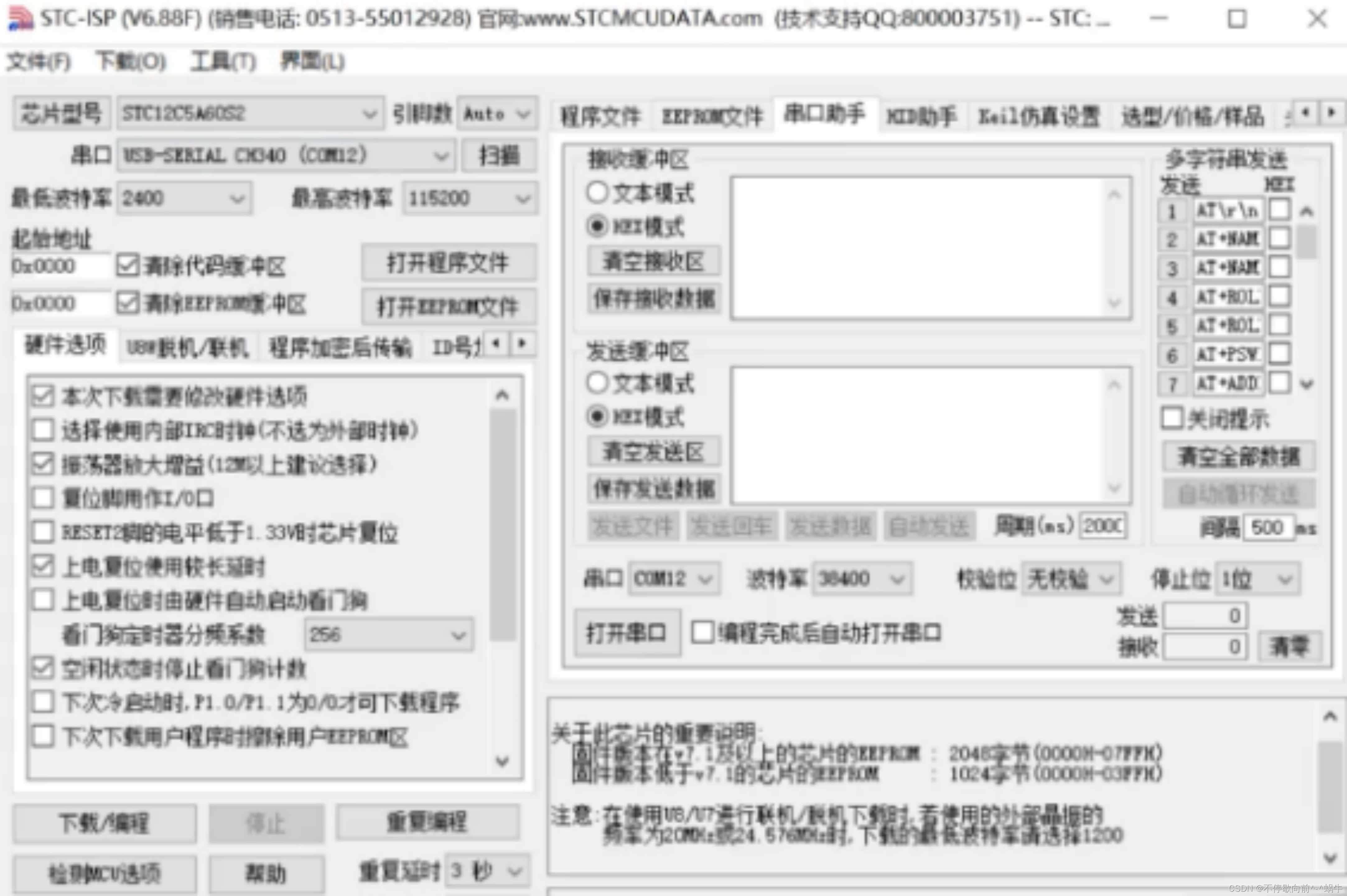
这一期继续介绍蓝牙模块的应用,之前给大家简单的分享了一些蓝牙模块的通信测试的知识,主要是介绍了AT指令的用法,另外通过手机端的蓝牙调试助手,和蓝牙模块之间建立一个通信测试,需要注意的是,在用AT指令的时候一定注意要加回车换行,要以文本模式来进行数据的发送,不能以设立禁止发送,这个是需要注意的,另外一个就是大家注意在查询的时候,要按住按键然后再发送指令。

这一次根据一个实际的应用实验来做测试,例如我们实验室的小孩,他们要做这种蓝牙的小车,蓝牙小车没有用手机来进行控制,他需要自己做一个蓝牙的遥控器来方便控制,做蓝牙遥控器就需要两个蓝牙模块,一个是遥控器这一端需要一个蓝牙模块,另外小车端也需要一个蓝牙模块,这个时候需要把遥控器端的蓝牙模块配置成这个主机,然后把小车的蓝牙模块配成从机。

另外还需要把主机和从机这两个蓝牙模块让他们俩相互绑定,这样的话,以后在用的时候就不需要再用AT指令对他们俩进行单独去配置了,不需要每一次用它都要配置,这个太麻烦了,所以可以让他们俩相互绑定,这也就是我们这几期要介绍的主要内容,也就是两个蓝牙模块之间如何进行主动的绑定,绑定之后他们俩之间的通信就比较简单了,也就是串口通信了。
比如串口带电机这边遥控器这一端,你用串口给他发什么,他就会帮你转发给另外一个模块,另外一个模块接收到这个指令,识别这个指令就可以控制你的小车做相应的动作了,这个也就是大家在买的这种玩具,比如说这种蓝牙控制的小车或者蓝牙手柄,有很多都是这种方式,大家应该见的都很多了。
如何做绑定,绑定需要两个模块,这两个模块要把它做绑定就要区分主机和从机,比如这个模块,用上位机来进行配,把上位机把他们要配好之后,再用单片机的时候,就和AT指令没有关系了,这样的话用起来就很方便,实际就是在串口编程了,串口如何发送数据,如何接收数据,如何解析数据,这个比较简单,大家感兴趣的可以自己去我之前分享的一些内容。
把它绑定好之后就可以做一个属于自己的蓝牙遥控小车,当然你也可以做其他的通信测试,或者其他的功能都是可以的,如何做绑定,那就要用串口助手来做处理,这个时候有两个串口了,一个是COM5,另外一个就是COM12,所以大家不要弄混了,COM5的话是作为主机,COM12作为从机,先配置主机,要是不放心的话可以拔插一下,看看是不是,插上会多一个COM5。
参考:https://blog.csdn.net/m0_66707146/article/details/124373270















 177
177











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









