







本文利用单片机普中STC89C52,独立按键输入,实现舵机的顺时针180°,多角度精确控制。
本代码目的在于练手及分享和复盘,作者水平有限,偏向入门级;如文中有错误以及更高效率的实现方法,欢迎讨论。
1,sg90舵机简介

产品参数
名称:9克舵机180度
尺寸:23mm X 12.2mm X 29mm
重量:9克
扭矩:1.5kg/cm
工作电压:4.2 - 6V
温度范围:0 - 55℃
运行速度:0.3s/60℃
死带宽:10ms
舵机需要接入三根线:棕色 GND | 黄色 信号线 | 红色 电源输入
普中单片机中需要只连着一个排插母线:可以利用公对母线进行插接,如下图所示
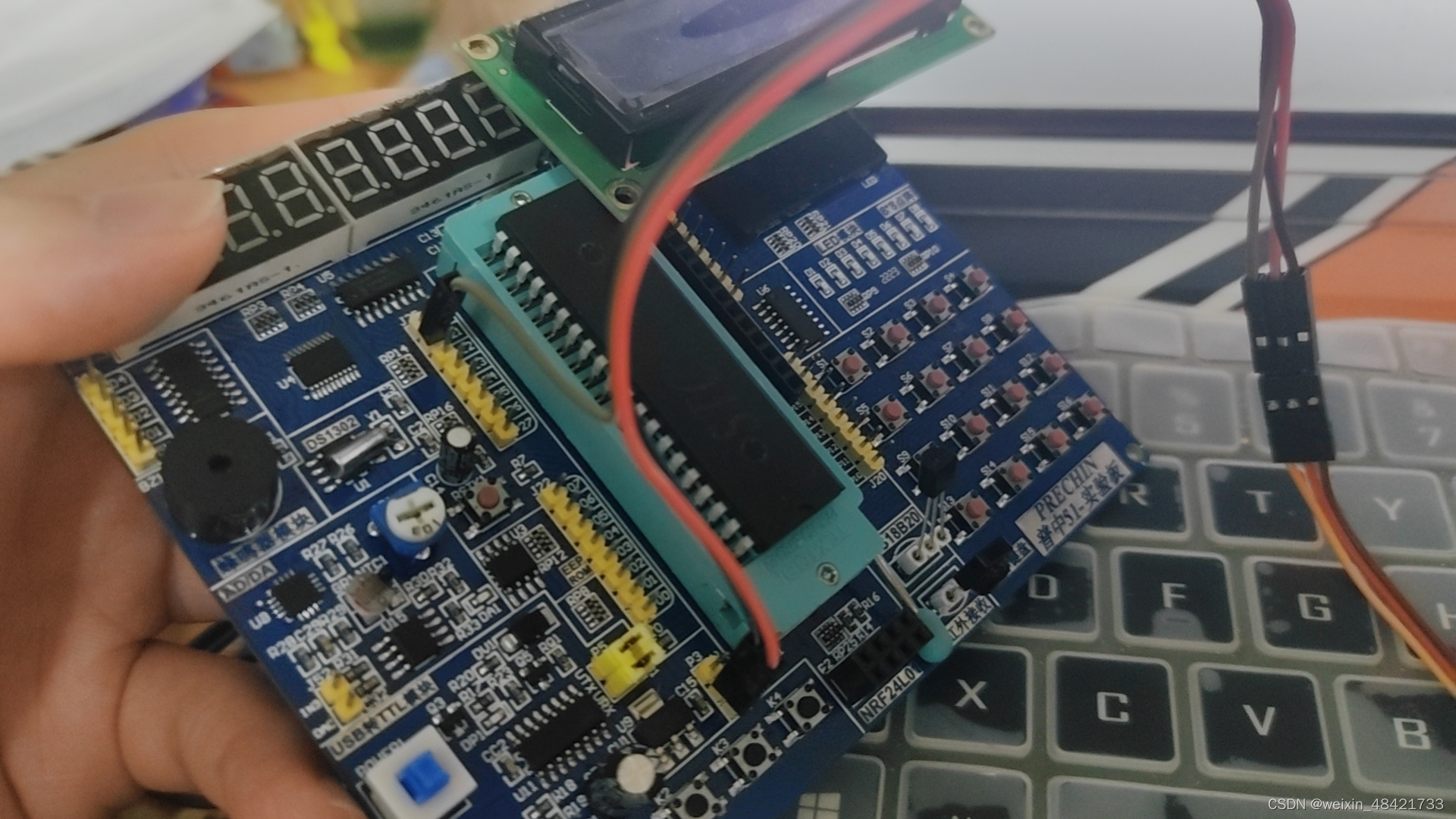
信号线可以连接任意io口;这里连接P2_1主要是因为P2_1同时也连接着DAC模块;调试舵机的时候可以根据DAC模块的led亮度判断程序运行情况。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









