






卷积神经网络
#计算二维互相关运算
def corr2d(X,K):
h,w=K.shape
Y=torch.zeros((X.shape[0]-h+1,X.shape[1]-w+1))
for i in range(Y.shape[0]):
for j in range(Y.shape[1]):
Y[i,j]=(X[i:i+h,j:j+w]*K).sum()
return Y
#conv
class Conv2D(nn.Module):
def __init__(self,kernal_size):
super(Conv2D, self).__init__()
self.weight=nn.Parameter(torch.rand(kernal_size))
self.bias=nn.Parameter(torch.zeros())#nn.Parameter使其变成可以训练的参数
def forward(self,X):
return corr2d(X,self.weight)+self.bias
'''padding and stride'''
def comp_conv2d(conv2d,X):
X=X.reshape((1,1)+X.shape)#1,1是批度数和通道数
Y=conv2d(X)
return Y.reshape(Y.shape[2:])
#设置nn.Conv2d参数,前两个参数是输入输出通道
conv2d=nn.Conv2d(1,1,kernel_size=3,padding=1)#p=k-1
conv2d=nn.Conv2d(1,1,kernel_size=(5,3),padding=(2,1))
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1, stride=2)
conv2d = nn.Conv2d(1, 1, kernel_size=(3, 5), padding=(0, 1), stride=(3, 4))
#多输入通道
def corr2d_multi_in(X,K):
return sum(d2l.corr2d(x,k) for x,k in zip(X,K))
#多输出
def corr2d_multi_in_out(X, K):
# 迭代“K”的第0个维度,每次都对输入“X”执行互相关运算。
# 最后将所有结果都叠加在一起
return torch.stack([corr2d_multi_in(X, k) for k in K], 0)
#1*1conv
def corr2d_multi_in_out_1x1(X, K):
c_i, h, w = X.shape
c_o = K.shape[0]
X = X.reshape((c_i, h * w))
K = K.reshape((c_o, c_i))
# 全连接层中的矩阵乘法
Y = torch.matmul(K, X)
return Y.reshape((c_o, h, w))
#pooling
pool2d=nn.MaxPool2d(3,padding=1,stride=2)
LeNet

net=nn.Sequential(nn.Conv2d(1,6,kernel_size=5,padding=2),nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2,stride=2),
nn.Conv2d(6,16,kernel_size=5),nn.Sigmoid(),
nn.AvgPool2d(kernel_size=2,stride=2),
nn.Flatten(),
nn.Linear(16*5*5,120),nn.Sigmoid()
,nn.Linear(120,84),nn.Sigmoid()
,nn.Linear(84,10))

AlexNet


d2l.evaluate_accuracy_gpu(net, data_iter, device=None)#评估精度gpu
网络架构
net = nn.Sequential(
# 这里,我们使用一个11*11的更大窗口来捕捉对象。
# 同时,步幅为4,以减少输出的高度和宽度。
# 另外,输出通道的数目远大于LeNet
nn.Conv2d(1, 96, kernel_size=11, stride=4, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# 减小卷积窗口,使用填充为2来使得输入与输出的高和宽一致,且增大输出通道数
nn.Conv2d(96, 256, kernel_size=5, padding=2), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
# 使用三个连续的卷积层和较小的卷积窗口。
# 除了最后的卷积层,输出通道的数量进一步增加。
# 在前两个卷积层之后,汇聚层不用于减少输入的高度和宽度
nn.Conv2d(256, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 384, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(384, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2),
nn.Flatten(),
# 这里,全连接层的输出数量是LeNet中的好几倍。使用dropout层来减轻过拟合
nn.Linear(6400, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096), nn.ReLU(),
nn.Dropout(p=0.5),
# 最后是输出层。由于这里使用Fashion-MNIST,所以用类别数为10,而非论文中的1000
nn.Linear(4096, 10))
因为pytorch不可以自动计算输出通道数,可以使用下面代码得到输出通道数,nn.Flatten()之后为6400
X = torch.randn(1, 1, 224, 224)
for layer in net:
X=layer(X)
print(layer.__class__.__name__,'output shape:\t',X.shape)
VGG

vgg相当于把大卷积核做小,例如把1个55卷积核换成两个33卷积核,这样输出大小依然不变。原始VGG网络有5个卷积块,其中前两个块各有一个卷积层,后三个块各包含两个卷积层。 第一个模块有64个输出通道,每个后续模块将输出通道数量翻倍,直到该数字达到512。由于该网络使用8个卷积层和3个全连接层,因此它通常被称为VGG-11。
def vgg_block(num_convs, in_channels, out_channels):
layers = []
for _ in range(num_convs):
layers.append(nn.Conv2d(in_channels, out_channels,
kernel_size=3, padding=1))
layers.append(nn.ReLU())
in_channels = out_channels
layers.append(nn.MaxPool2d(kernel_size=2,stride=2))
return nn.Sequential(*layers)
conv_arch = ((1, 64), (1, 128), (2, 256), (2, 512), (2, 512))
def vgg(conv_arch):
conv_blks = []
in_channels = 1
# 卷积层部分
for (num_convs, out_channels) in conv_arch:
conv_blks.append(vgg_block(num_convs, in_channels, out_channels))
in_channels = out_channels
return nn.Sequential(
*conv_blks, nn.Flatten(),
# 全连接层部分
nn.Linear(out_channels * 7 * 7, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 10))
net = vgg(conv_arch)
NiN

NiN块以一个普通卷积层开始,后面是两个11的卷积层。这两个11卷积层充当带有ReLU激活函数的逐像素全连接层。 第一层的卷积窗口形状通常由用户设置。 随后的卷积窗口形状固定为1*1。
#nin块
def nin_block(in_channels, out_channels, kernel_size, strides, padding):
return nn.Sequential(
nn.Conv2d(in_channels, out_channels, kernel_size, strides, padding),
nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU(),
nn.Conv2d(out_channels, out_channels, kernel_size=1), nn.ReLU())
#网络
net = nn.Sequential(
nin_block(1, 96, kernel_size=11, strides=4, padding=0),
nn.MaxPool2d(3, stride=2),
nin_block(96, 256, kernel_size=5, strides=1, padding=2),
nn.MaxPool2d(3, stride=2),
nin_block(256, 384, kernel_size=3, strides=1, padding=1),
nn.MaxPool2d(3, stride=2),
nn.Dropout(0.5),
# 标签类别数是10
nin_block(384, 10, kernel_size=3, strides=1, padding=1),
nn.AdaptiveAvgPool2d((1, 1)),
# 将四维的输出转成二维的输出,其形状为(批量大小,10)
nn.Flatten())
GoogLeNet(并行)
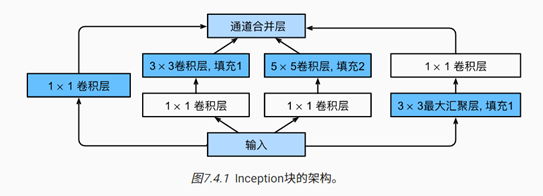
class Inception(nn.Module):
# c1--c4是每条路径的输出通道数
def __init__(self, in_channels, c1, c2, c3, c4, **kwargs):
super(Inception, self).__init__(**kwargs)
# 线路1,单1x1卷积层
self.p1_1 = nn.Conv2d(in_channels, c1, kernel_size=1)
# 线路2,1x1卷积层后接3x3卷积层
self.p2_1 = nn.Conv2d(in_channels, c2[0], kernel_size=1)
self.p2_2 = nn.Conv2d(c2[0], c2[1], kernel_size=3, padding=1)
# 线路3,1x1卷积层后接5x5卷积层
self.p3_1 = nn.Conv2d(in_channels, c3[0], kernel_size=1)
self.p3_2 = nn.Conv2d(c3[0], c3[1], kernel_size=5, padding=2)
# 线路4,3x3最大汇聚层后接1x1卷积层
self.p4_1 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1)
self.p4_2 = nn.Conv2d(in_channels, c4, kernel_size=1)
def forward(self, x):
p1 = F.relu(self.p1_1(x))
p2 = F.relu(self.p2_2(F.relu(self.p2_1(x))))
p3 = F.relu(self.p3_2(F.relu(self.p3_1(x))))
p4 = F.relu(self.p4_2(self.p4_1(x)))
# 在通道维度上连结输出
return torch.cat((p1, p2, p3, p4), dim=1)
# 连接通道维度上每个块的输入和输出
X = torch.cat((X, Y), dim=1)
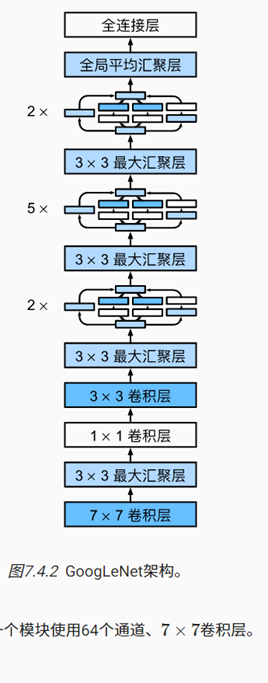
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b2 = nn.Sequential(nn.Conv2d(64, 64, kernel_size=1),
nn.ReLU(),
nn.Conv2d(64, 192, kernel_size=3, padding=1),
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b3 = nn.Sequential(Inception(192, 64, (96, 128), (16, 32), 32),
Inception(256, 128, (128, 192), (32, 96), 64),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b4 = nn.Sequential(Inception(480, 192, (96, 208), (16, 48), 64),
Inception(512, 160, (112, 224), (24, 64), 64),
Inception(512, 128, (128, 256), (24, 64), 64),
Inception(512, 112, (144, 288), (32, 64), 64),
Inception(528, 256, (160, 320), (32, 128), 128),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
b5 = nn.Sequential(Inception(832, 256, (160, 320), (32, 128), 128),
Inception(832, 384, (192, 384), (48, 128), 128),
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten())
net = nn.Sequential(b1, b2, b3, b4, b5, nn.Linear(1024, 10))
Batch Normalization
Batch Normalization层
nn.BatchNorm2d(6)#6为输入通道数
ResNet

残差块
class Residual(nn.Module): #@save
def __init__(self, input_channels, num_channels,
use_1x1conv=False, strides=1):
super().__init__()
self.conv1 = nn.Conv2d(input_channels, num_channels,
kernel_size=3, padding=1, stride=strides)
self.conv2 = nn.Conv2d(num_channels, num_channels,
kernel_size=3, padding=1)
if use_1x1conv:
self.conv3 = nn.Conv2d(input_channels, num_channels,
kernel_size=1, stride=strides)
else:
self.conv3 = None
self.bn1 = nn.BatchNorm2d(num_channels)
self.bn2 = nn.BatchNorm2d(num_channels)
def forward(self, X):
Y = F.relu(self.bn1(self.conv1(X)))
Y = self.bn2(self.conv2(Y))
if self.conv3:
X = self.conv3(X)
Y += X
return F.relu(Y)
ResNet模型
b1 = nn.Sequential(nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
def resnet_block(input_channels, num_channels, num_residuals,
first_block=False):
blk = []
for i in range(num_residuals):
if i == 0 and not first_block:
blk.append(Residual(input_channels, num_channels,
use_1x1conv=True, strides=2))
else:
blk.append(Residual(num_channels, num_channels))
return blk
b2 = nn.Sequential(*resnet_block(64, 64, 2, first_block=True))
b3 = nn.Sequential(*resnet_block(64, 128, 2))
b4 = nn.Sequential(*resnet_block(128, 256, 2))
b5 = nn.Sequential(*resnet_block(256, 512, 2))
net = nn.Sequential(b1, b2, b3, b4, b5,
nn.AdaptiveAvgPool2d((1,1)),
nn.Flatten(), nn.Linear(512, 10))
DenseNet


#稠密块
def conv_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=3, padding=1))
class DenseBlock(nn.Module):
def __init__(self, num_convs, input_channels, num_channels):
super(DenseBlock, self).__init__()
layer = []
for i in range(num_convs):
layer.append(conv_block(
num_channels * i + input_channels, num_channels))
self.net = nn.Sequential(*layer)
def forward(self, X):
for blk in self.net:
Y = blk(X)
# 连接通道维度上每个块的输入和输出
X = torch.cat((X, Y), dim=1)
return X
过渡层:由于每个稠密块都会带来通道数的增加,使用过多则会过于复杂化模型。 而过渡层可以用来控制模型复杂度。 它通过1*1卷积层来减小通道数,并使用步幅为2的平均汇聚层减半高和宽,从而进一步降低模型复杂度
def transition_block(input_channels, num_channels):
return nn.Sequential(
nn.BatchNorm2d(input_channels), nn.ReLU(),
nn.Conv2d(input_channels, num_channels, kernel_size=1),
nn.AvgPool2d(kernel_size=2, stride=2))
DenseNet首先使用同ResNet一样的单卷积层和最大汇聚层
b1 = nn.Sequential(
nn.Conv2d(1, 64, kernel_size=7, stride=2, padding=3),
nn.BatchNorm2d(64), nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2, padding=1))
DenseNet使用过渡层来减半高和宽,并减半通道数
# num_channels为当前的通道数
num_channels, growth_rate = 64, 32
num_convs_in_dense_blocks = [4, 4, 4, 4]
blks = []
for i, num_convs in enumerate(num_convs_in_dense_blocks):
blks.append(DenseBlock(num_convs, num_channels, growth_rate))
# 上一个稠密块的输出通道数
num_channels += num_convs * growth_rate
# 在稠密块之间添加一个转换层,使通道数量减半
if i != len(num_convs_in_dense_blocks) - 1:
blks.append(transition_block(num_channels, num_channels // 2))
num_channels = num_channels // 2
接上全局汇聚层和全连接层来输出结果
net = nn.Sequential(
b1, *blks,
nn.BatchNorm2d(num_channels), nn.ReLU(),
nn.AdaptiveAvgPool2d((1, 1)),
nn.Flatten(),
nn.Linear(num_channels, 10))















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









