






1.FloW数据集 ——全球第一个无人船视角的水面漂浮垃圾检测数据集。

数据集相关论文FloW: A Dataset and Benchmark for Floating Waste Detection in InlandWaters 发表至 IEEE International Conference onComputer Vision 2021 (ICCV 2021)。
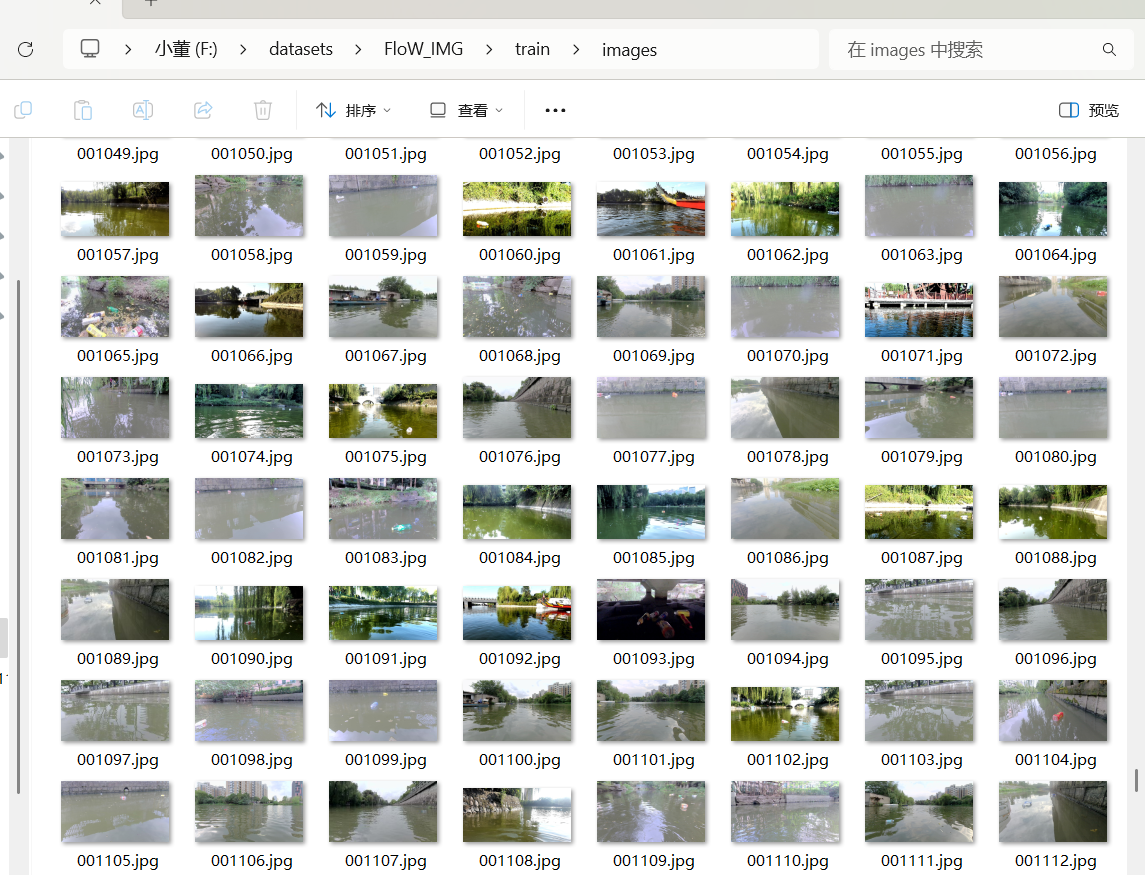
FloW-Img包含2000张图像和5271个标记目标,小目标(Area< 32*32)占其中的一半以上。随机选择1200张图像作为训练集,其余的800张作为测试集。只包含bottle一个类。
数据集图像:
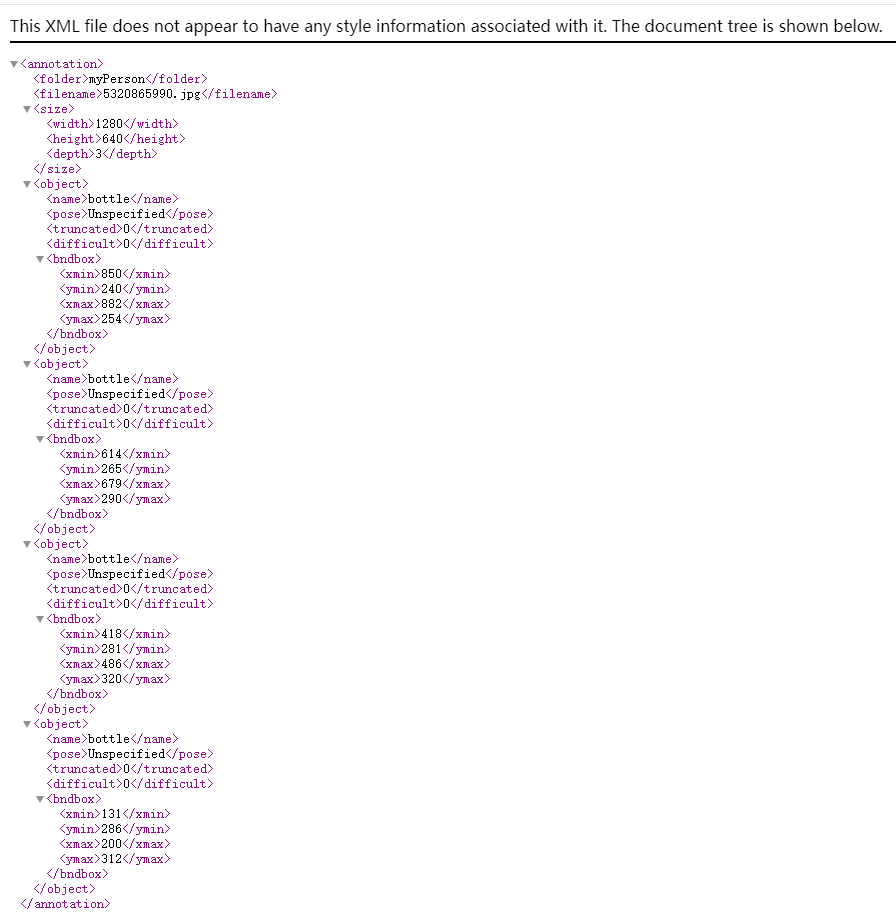
 1)包含VOC格式的xml标注文件
1)包含VOC格式的xml标注文件
结构:每张图像对应一个XML文件,包含物体类别、边界框(左上右下坐标)及图像原数据等。
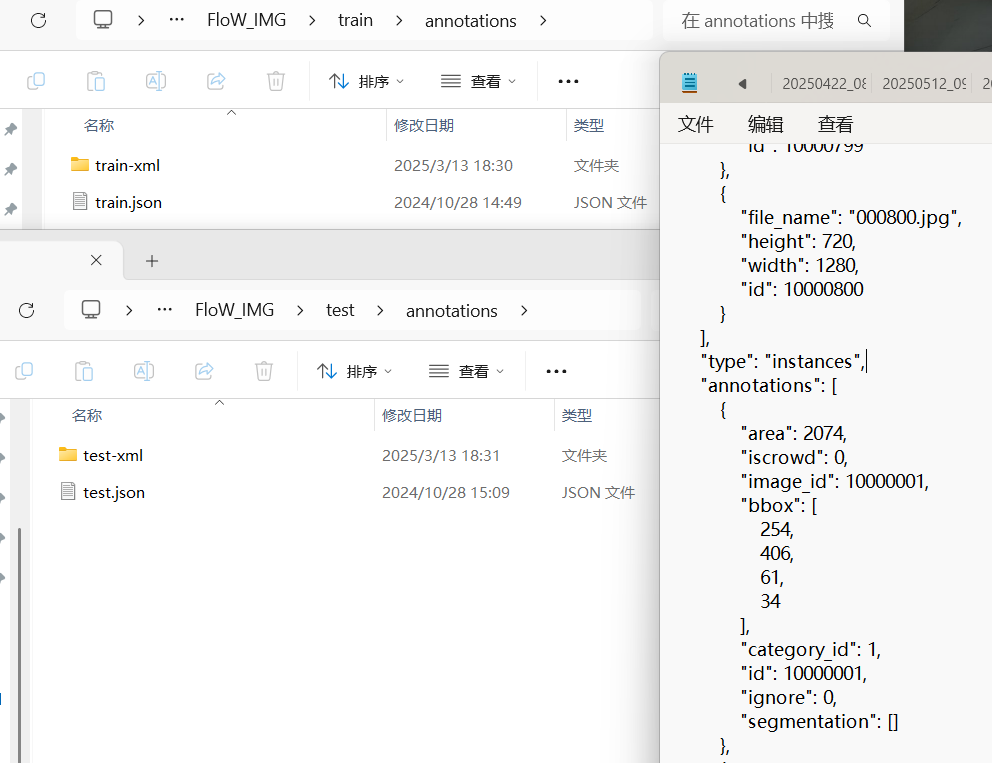
2)包含COCO格式的json标注文件
结构:使用单个JSON文件存储所有图像的标注信息,包括类别、边界框(bbox)等。
2.水面垃圾检测数据集
共有2400张图像,随机选择1441张图像作为训练集,480张作为验证集,479张作为测试集。
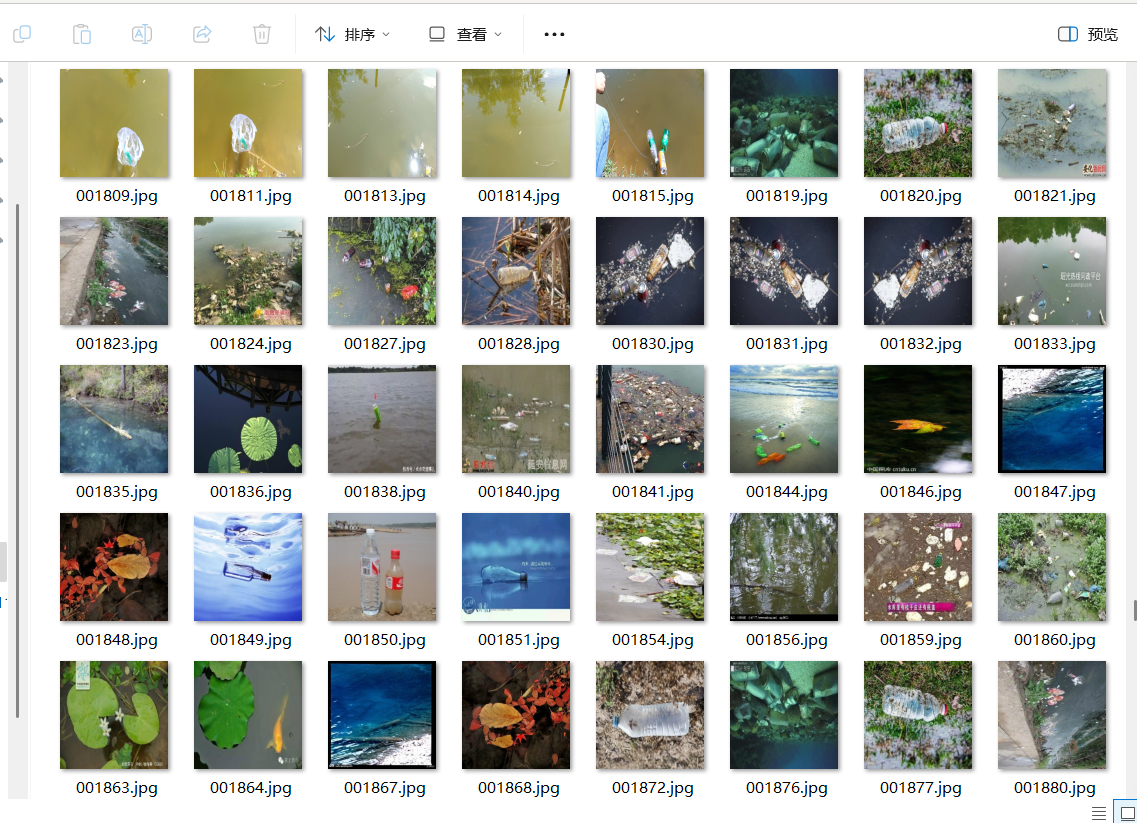
标注的对象共有以下8种:
[‘bottle’, ‘branch’, ‘milk-box’, ‘plastic-bag’, ‘grass’, ‘plastic-garbage’, ‘ball’, ‘leaf’]
bottle:瓶子
branch:树枝
milk-box:牛奶盒
plastic-bag:塑料袋
grass:草
plastic-garbage:塑料垃圾
ball:球
leaf:树叶
数据集图像:
1)包含COCO格式的json标注文件
2)包含VOC存储格式
3.FloW数据集+水面垃圾检测数据集
把前面提到的两个数据集加到了一起(因为FLow数据集只有一个类,不利于模型学习类别信息,所以我把两个数据集结合到一起。并且两个数据集中都有共同的bottle类。),共有4400张图像,随机选择2641张图像作为训练集,880张作为验证集,879张作为测试集。
标注的对象依然共有以下8种:
[‘bottle’, ‘branch’, ‘milk-box’, ‘plastic-bag’, ‘grass’, ‘plastic-garbage’, ‘ball’, ‘leaf’]
1)包含划分过的xml标注文件
2)包含划分过的json标注文件
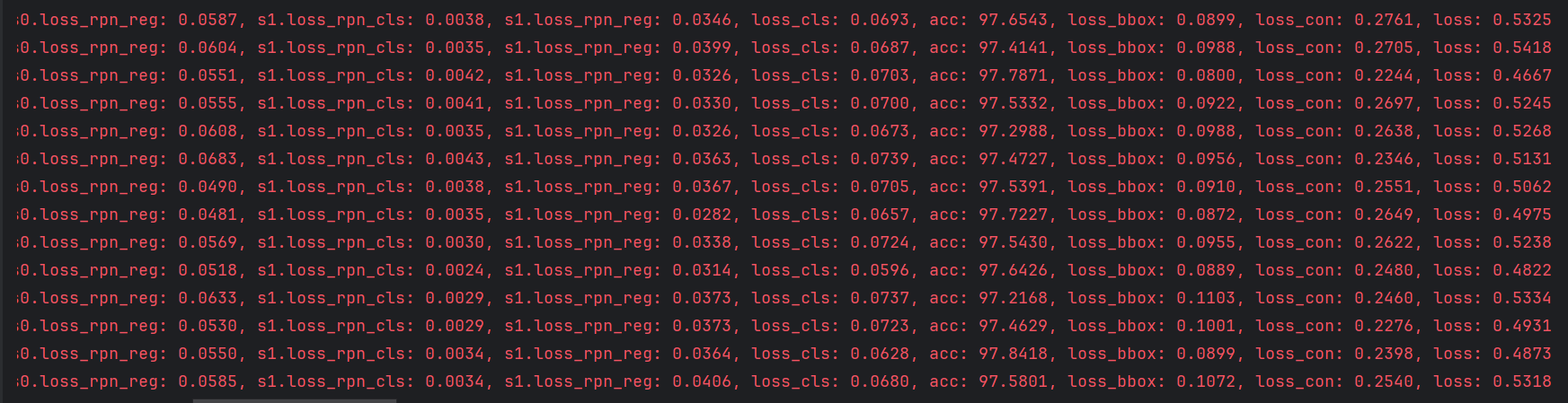
该数据集放到模型中的训练结果如下,亲测没问题。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









